Hybrid Dynamics Modeling and Trajectory Planning for a Cable-Trailer System with a Quadruped Robot
2404.12220
0
0

Abstract
Inspired by the utilization of dogs in sled-pulling for transportation, we introduce a cable-trailer system with a quadruped robot. The motion planning of the proposed robot system presents challenges arising from the nonholonomic constraints of the trailer, system underactuation, and hybrid interaction through the cable. To tackle these challenges, we develop a hybrid dynamics model that accounts for the cable's taut/slack status. Since it is computationally intense to directly optimize the trajectory, we first propose a search algorithm to compute a sub-optimal trajectory as the initial solution. Then, a novel collision avoidance constraint based on the geometric shapes of objects is proposed to formulate the trajectory optimization problem for the hybrid system. The proposed trajectory planning method is implemented on a Unitree A1 quadruped robot with a customized cable-trailer and validated through experiments.
Create account to get full access
Overview
- This paper presents a hybrid dynamics modeling and trajectory planning approach for a cable-trailer system with a quadruped robot.
- The researchers developed a mathematical model that combines the dynamics of the quadruped robot and the cable-trailer system, allowing for more accurate control and planning.
- The proposed method was evaluated through simulations and experiments, demonstrating its effectiveness in navigating complex environments and handling dynamic loads.
Plain English Explanation
In this research, the scientists wanted to find a better way to control and plan the movements of a quadruped robot that is pulling a trailer using a cable. Controlling such a system can be challenging because the robot and the trailer interact in complex ways, and the cable can add additional dynamics to the system.
To address this, the researchers created a new mathematical model that combines the behavior of the quadruped robot and the cable-trailer system. This hybrid model allows for more accurate prediction of how the entire system will move and respond to different inputs, like changes in the robot's walking pattern or the weight of the trailer.
By using this hybrid model, the researchers were able to develop better plans for how the quadruped robot should move to pull the trailer through different environments, such as tight spaces or uneven terrain. They tested their approach through computer simulations and real-world experiments, and found that it worked well, allowing the robot to navigate complex situations while maintaining control over the trailer.
This research could be useful for applications where a quadruped robot needs to transport heavy or bulky cargo, such as in search and rescue operations, construction, or exploration of difficult environments. The hybrid modeling and planning approach developed in this paper could help make these types of systems more reliable and effective.
Technical Explanation
The paper presents a hybrid dynamics modeling and trajectory planning framework for a cable-trailer system attached to a quadruped robot. The researchers developed a mathematical model that combines the dynamics of the quadruped robot, modeled using hierarchical experience-informed navigation for multi-modal quadrupedal locomotion, and the cable-trailer system, modeled using dual-quaternion control for UAVs with cable-suspended loads. This hybrid model allows for more accurate prediction of the system's behavior, which is crucial for effective motion planning and control.
The researchers then used this hybrid model to plan trajectories for the quadruped robot to navigate the cable-trailer system through complex environments, such as narrow passages or uneven terrain. They formulated the trajectory planning as an interaction-aware vehicle motion planning and collision avoidance problem, taking into account the dynamic constraints of both the robot and the trailer.
The proposed approach was evaluated through both simulations and real-world experiments, demonstrating its effectiveness in handling various scenarios, including dynamic load changes and terrain variations. The researchers also showed that the hybrid modeling and planning framework outperformed traditional methods in terms of tracking accuracy and energy efficiency.
Critical Analysis
The paper presents a comprehensive approach to modeling and controlling a cable-trailer system with a quadruped robot, addressing a challenging problem in the field of legged robotics. The hybrid dynamics modeling and the interaction-aware trajectory planning techniques developed in this work are novel and provide a solid foundation for further research.
However, the paper does not extensively discuss the limitations of the proposed approach. For example, the researchers do not explore how the system would perform in the presence of external disturbances, such as strong winds or uneven ground conditions, which could significantly affect the cable-trailer dynamics. Additionally, the paper does not provide a detailed analysis of the computational complexity of the planning algorithm, which could be an important factor for real-time applications.
Furthermore, the paper could benefit from a more thorough comparison with other state-of-the-art methods in the field, such as adaptive gait modeling and optimization for principally kinematic systems or autonomous locomotion mode transition for quadruped-track legged robots. This could help to better contextualize the contributions of the proposed approach and identify areas for potential improvements.
Conclusion
The paper presents a novel hybrid dynamics modeling and trajectory planning framework for a cable-trailer system attached to a quadruped robot. The researchers developed a comprehensive mathematical model that captures the complex interactions between the robot and the trailer, which allowed them to plan more effective trajectories for the system to navigate through challenging environments.
The proposed approach was validated through simulations and real-world experiments, demonstrating its potential for applications such as search and rescue operations, construction, or exploration in difficult terrains. While the paper could benefit from a more detailed discussion of the limitations and comparisons with other state-of-the-art methods, the overall contribution of this work is significant and could inspire further research in the field of legged robotics and multi-body system control.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Design and Nonlinear Modeling of a Modular Cable Driven Soft Robotic Arm
Xinda Qi, Yu Mei, Dong Chen, Zhaojian Li, Xiaobo Tan
0
0
We propose a novel multi-section cable-driven soft robotic arm inspired by octopus tentacles along with a new modeling approach. Each section of the modular manipulator is made of a soft tubing backbone, a soft silicon arm body, and two rigid endcaps, which connect adjacent sections and decouple the actuation cables of different sections. The soft robotic arm is made with casting after the rigid endcaps are 3D-printed, achieving low-cost and convenient fabrication. To capture the nonlinear effect of cables pushing into the soft silicon arm body, which results from the absence of intermediate rigid cable guides for higher compliance, an analytical static model is developed to capture the relationship between the bending curvature and the cable lengths. The proposed model shows superior prediction performance in experiments over that of a baseline model, especially under large bending conditions. Based on the nonlinear static model, a kinematic model of a multi-section arm is further developed and used to derive a motion planning algorithm. Experiments show that the proposed soft arm has high flexibility and a large workspace, and the tracking errors under the algorithm based on the proposed modeling approach are up to 52$%$ smaller than those with the algorithm derived from the baseline model. The presented modeling approach is expected to be applicable to a broad range of soft cable-driven actuators and manipulators.
5/17/2024
Optimal Gait Control for a Tendon-driven Soft Quadruped Robot by Model-based Reinforcement Learning
Xuezhi Niu, Kaige Tan, Lei Feng
0
0
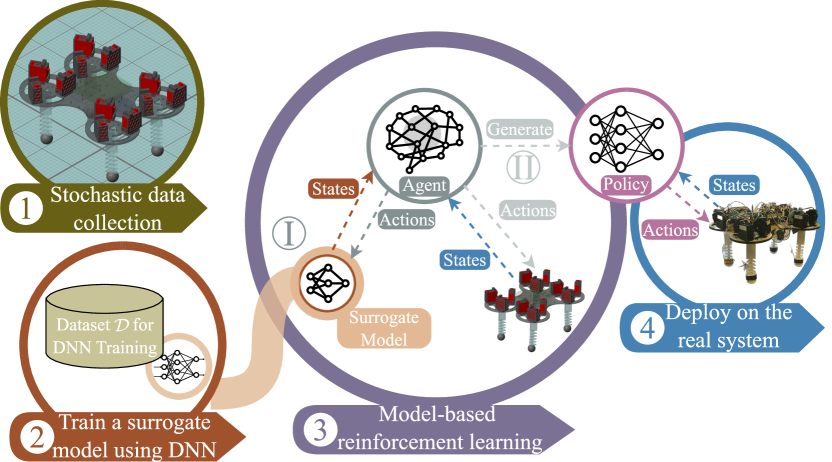
This study presents an innovative approach to optimal gait control for a soft quadruped robot enabled by four Compressible Tendon-driven Soft Actuators (CTSAs). Improving our previous studies of using model-free reinforcement learning for gait control, we employ model-based reinforcement learning (MBRL) to further enhance the performance of the gait controller. Compared to rigid robots, the proposed soft quadruped robot has better safety, less weight, and a simpler mechanism for fabrication and control. However, the primary challenge lies in developing sophisticated control algorithms to attain optimal gait control for fast and stable locomotion. The research employs a multi-stage methodology, including state space restriction, data-driven model training, and reinforcement learning algorithm development. Compared to benchmark methods, the proposed MBRL algorithm, combined with post-training, significantly improves the efficiency and performance of gait control policies. The developed policy is both robust and adaptable to the robot's deformable morphology. The study concludes by highlighting the practical applicability of these findings in real-world scenarios.
6/12/2024

Dual Quaternion Control of UAVs with Cable-suspended Load
Yuxia Yuan, Markus Ryll
0
0
Modeling the kinematics and dynamics of robotics systems with suspended loads using dual quaternions has not been explored so far. This paper introduces a new innovative control strategy using dual quaternions for UAVs with cable-suspended loads, focusing on the sling load lifting and tracking problems. By utilizing the mathematical efficiency and compactness of dual quaternions, a unified representation of the UAV and its suspended load's dynamics and kinematics is achieved, facilitating the realization of load lifting and trajectory tracking. The simulation results have tested the proposed strategy's accuracy, efficiency, and robustness. This study makes a substantial contribution to present this novel control strategy that harnesses the benefits of dual quaternions for cargo UAVs. Our work also holds promise for inspiring future innovations in under-actuated systems control using dual quaternions.
4/12/2024

Optimal Gait Design for a Soft Quadruped Robot via Multi-fidelity Bayesian Optimization
Kaige Tan, Xuezhi Niu, Qinglei Ji, Lei Feng, Martin Torngren
0
0
This study focuses on the locomotion capability improvement in a tendon-driven soft quadruped robot through an online adaptive learning approach. Leveraging the inverse kinematics model of the soft quadruped robot, we employ a central pattern generator to design a parametric gait pattern, and use Bayesian optimization (BO) to find the optimal parameters. Further, to address the challenges of modeling discrepancies, we implement a multi-fidelity BO approach, combining data from both simulation and physical experiments throughout training and optimization. This strategy enables the adaptive refinement of the gait pattern and ensures a smooth transition from simulation to real-world deployment for the controller. Moreover, we integrate a computational task off-loading architecture by edge computing, which reduces the onboard computational and memory overhead, to improve real-time control performance and facilitate an effective online learning process. The proposed approach successfully achieves optimal walking gait design for physical deployment with high efficiency, effectively addressing challenges related to the reality gap in soft robotics.
6/12/2024