Hierarchical Experience-informed Navigation for Multi-modal Quadrupedal Rebar Grid Traversal

0
↗️
Sign in to get full access
Overview
- This study presents a layered, experience-based, multi-modal contact planning framework for agile quadrupedal locomotion over a constrained rebar environment.
- The hierarchical planner incorporates locomotion-specific modules into the high-level contact sequence planner and solves kinodynamically-aware trajectory optimization as the low-level motion planner.
- The experience planning heuristic offers an effective way of providing candidate footholds for a legged contact planner.
- A guiding torso path heuristic is introduced at the global planning level to enhance the navigation success rate in the presence of environmental obstacles.
Plain English Explanation
The researchers have developed a new way for four-legged robots to navigate over a challenging environment with obstacles, like rebar. Their planning framework has two main parts:
-
High-level Contact Sequence Planner: This part figures out where the robot's feet should go to get from one point to another. It uses "experience" - information the robot has learned from previous trials - to suggest good places for the robot's feet to step.
-
Low-level Motion Planner: This part takes the high-level plan and figures out the exact motions the robot's joints need to make to follow that plan. It does this in a way that makes the robot's movements smooth and stable.
The researchers also added a "guiding torso path" to the high-level planner. This helps the robot navigate around obstacles more successfully, by giving it a general idea of where its body should go.
Overall, this framework allows the four-legged robot to navigate over difficult environments more effectively, by combining high-level planning with low-level motion control and using the robot's past experience to guide its movements.
Technical Explanation
The researchers' hierarchical planning framework incorporates locomotion-specific modules into the high-level contact sequence planner and solves kinodynamically-aware trajectory optimization as the low-level motion planner.
The experience planning heuristic allows the high-level planner to effectively suggest good footholds based on the robot's prior knowledge. Additionally, the researchers introduce a guiding torso path heuristic at the global planning level to enhance the navigation success rate in the presence of obstacles.
Through quantitative analysis and experimental validation, the researchers demonstrate that this hierarchical, experience-informed planning approach can generate kinodynamically feasible locomotion trajectories that enable the quadrupedal robot to successfully navigate the constrained rebar environment.
Critical Analysis
The paper provides a thorough explanation of the planning framework and its components, as well as detailed experimental validation. However, the authors do not discuss any potential limitations or caveats of their approach.
For example, the reliance on prior "experience" may limit the robot's ability to navigate completely novel environments. Additionally, the effectiveness of the guiding torso path heuristic may depend on the specific characteristics of the environment, and its generalizability is not clearly established.
Further research could explore how this framework performs in more diverse and challenging environments, as well as investigate ways to make the planning more adaptive and generalizable to new situations.
Conclusion
This study presents a hierarchical, experience-informed planning framework that enables agile quadrupedal locomotion over constrained environments. By incorporating locomotion-specific modules, kinodynamic trajectory optimization, and a guiding torso path heuristic, the researchers have developed a comprehensive approach to navigate complex terrains.
The experimental validation demonstrates the effectiveness of this framework, suggesting it could be a valuable tool for deploying legged robots in real-world applications with challenging environments. Further research to address potential limitations and expand the framework's generalizability could lead to even more robust and adaptable quadrupedal locomotion capabilities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
↗️
0
Hierarchical Experience-informed Navigation for Multi-modal Quadrupedal Rebar Grid Traversal
Max Asselmeier, Jane Ivanova, Ziyi Zhou, Patricio A. Vela, Ye Zhao
This study focuses on a layered, experience-based, multi-modal contact planning framework for agile quadrupedal locomotion over a constrained rebar environment. To this end, our hierarchical planner incorporates locomotion-specific modules into the high-level contact sequence planner and solves kinodynamically-aware trajectory optimization as the low-level motion planner. Through quantitative analysis of the experience accumulation process and experimental validation of the kinodynamic feasibility of the generated locomotion trajectories, we demonstrate that the experience planning heuristic offers an effective way of providing candidate footholds for a legged contact planner. Additionally, we introduce a guiding torso path heuristic at the global planning level to enhance the navigation success rate in the presence of environmental obstacles. Our results indicate that the torso-path guided experience accumulation requires significantly fewer offline trials to successfully reach the goal compared to regular experience accumulation. Finally, our planning framework is validated in both dynamics simulations and real hardware implementations on a quadrupedal robot provided by Skymul Inc.
Read more4/16/2024

0
Hierarchical Large Scale Multirobot Path (Re)Planning
Lishuo Pan, Kevin Hsu, Nora Ayanian
We consider a large-scale multi-robot path planning problem in a cluttered environment. Our approach achieves real-time replanning by dividing the workspace into cells and utilizing a hierarchical planner. Specifically, we propose novel multi-commodity flow-based high-level planners that route robots through cells with reduced congestion, along with an anytime low-level planner that computes collision-free paths for robots within each cell in parallel. A highlight of our method is a significant improvement in computation time. Specifically, we show empirical results of a 500-times speedup in computation time compared to the baseline multi-agent pathfinding approach on the environments we study. We account for the robot's embodiment and support non-stop execution with continuous replanning. We demonstrate the real-time performance of our algorithm with up to 142 robots in simulation, and a representative 32 physical Crazyflie nano-quadrotor experiment.
Read more9/25/2024
0
Diffusion-based learning of contact plans for agile locomotion
Victor Dh'edin, Adithya Kumar Chinnakkonda Ravi, Armand Jordana, Huaijiang Zhu, Avadesh Meduri, Ludovic Righetti, Bernhard Scholkopf, Majid Khadiv
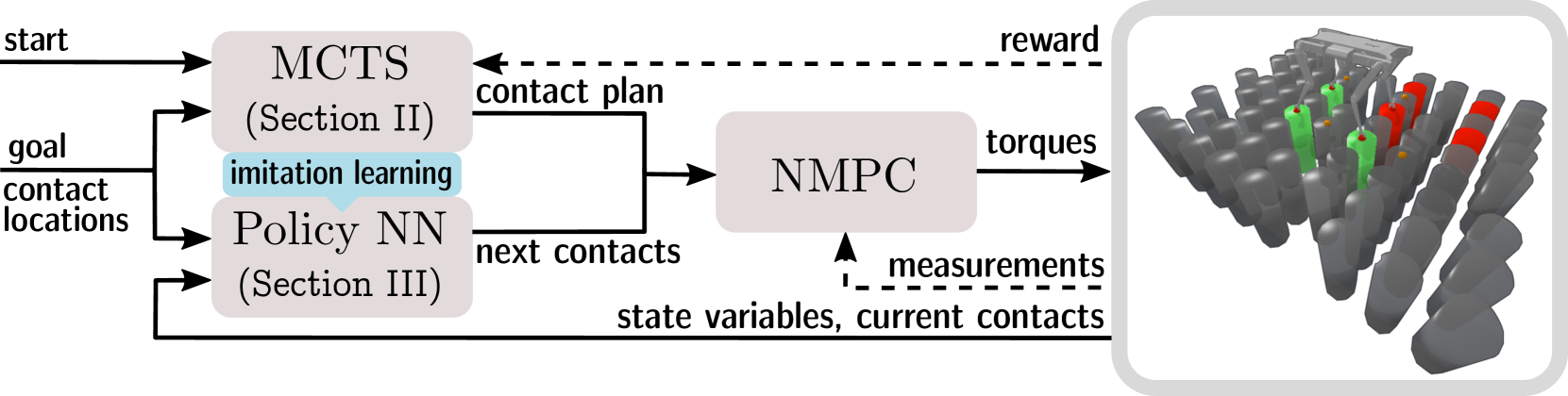
Legged robots have become capable of performing highly dynamic maneuvers in the past few years. However, agile locomotion in highly constrained environments such as stepping stones is still a challenge. In this paper, we propose a combination of model-based control, search, and learning to design efficient control policies for agile locomotion on stepping stones. In our framework, we use nonlinear model predictive control (NMPC) to generate whole-body motions for a given contact plan. To efficiently search for an optimal contact plan, we propose to use Monte Carlo tree search (MCTS). While the combination of MCTS and NMPC can quickly find a feasible plan for a given environment (a few seconds), it is not yet suitable to be used as a reactive policy. Hence, we generate a dataset for optimal goal-conditioned policy for a given scene and learn it through supervised learning. In particular, we leverage the power of diffusion models in handling multi-modality in the dataset. We test our proposed framework on a scenario where our quadruped robot Solo12 successfully jumps to different goals in a highly constrained environment.
Read more7/17/2024
🧪
0
Scalable Multi-Robot Motion Planning Using Guidance-Informed Hypergraphs
Courtney McBeth, James Motes, Isaac Ngui, Marco Morales, Nancy M. Amato
In this work, we present a multi-robot planning framework that leverages guidance about the problem to efficiently search the planning space. This guidance captures when coordination between robots is necessary, allowing us to decompose the intractably large multi-robot search space while limiting risk of inter-robot conflicts by composing relevant robot groups together while planning. Our framework additionally supports planning with kinodynamic constraints through our conflict resolution structure. This structure also improves the scalability of our approach by eliminating unnecessary work during the construction of motion solutions. We also provide an application of this framework to multiple mobile robot motion planning in congested environments using topological guidance. Our previous work has explored using topological guidance, which utilizes information about the robots' environment, in these multi-robot settings where a high degree of coordination is required of the full robot group. In real-world scenarios, this high level of coordination is not always necessary and results in excessive computational overhead. Here, we leverage our novel framework to achieve a significant improvement in scalability and show that our method efficiently finds paths for robot teams up to an order of magnitude larger than existing state-of-the-art methods in congested settings with narrow passages in the environment.
Read more7/2/2024