A Hybrid Task-Constrained Motion Planning for Collaborative Robots in Intelligent Remanufacturing
2406.08283
0
0
📉
Abstract
Industrial manipulators have extensively collaborated with human operators to execute tasks, e.g., disassembly of end-of-use products, in intelligent remanufacturing. A safety task execution requires real-time path planning for the manipulator's end-effector to autonomously avoid human operators. This is even more challenging when the end-effector needs to follow a planned path while avoiding the collision between the manipulator body and human operators, which is usually computationally expensive and limits real-time application. This paper proposes an efficient hybrid motion planning algorithm that consists of an A$^
Create account to get full access
Overview
- This paper proposes an efficient hybrid motion planning algorithm that combines an A* algorithm for path planning in task space and an online manipulator reconfiguration mechanism (OMRM) to avoid collisions between the manipulator body and human operators in intelligent remanufacturing tasks.
- The A* algorithm plans the shortest collision-free path for the manipulator's end-effector, while the OMRM selects an alternative joint configuration with minimum reconfiguration effort to help the manipulator follow the planned path while avoiding human operators.
- The proposed approach aims to enable safe task execution by industrial manipulators that collaborate with human operators.
Plain English Explanation
In this research, the authors tackle the challenge of enabling industrial robots to safely work alongside human operators during tasks like disassembling used products. This is important for intelligent remanufacturing where robots and humans need to collaborate.
The key issue is that the robot's arm needs to follow a planned path, but it also needs to avoid colliding with the human. This is tricky because the robot's body movements can put the human at risk, and planning all of this in real-time is computationally expensive.
To solve this, the researchers developed a two-part algorithm. First, they use an A* search to find the shortest path for the robot's end-effector that avoids collisions. Then, they have a system that can quickly reconfigure the robot's joints to follow that path while keeping the robot's body safely away from the human.
This hybrid approach allows the robot to execute tasks safely by planning its motion in both the task space (the end-effector path) and the configuration space (the robot's joint positions). The authors show through simulations and experiments that this works better than previous methods.
Technical Explanation
The proposed algorithm consists of two main components:
-
A Algorithm for End-Effector Path Planning -
Online Manipulator Reconfiguration Mechanism (OMRM): When the planned end-effector path risks colliding the manipulator's body with the human operator, the OMRM selects an alternative joint configuration from a pre-computed database. This configuration allows the manipulator to follow the planned end-effector path while avoiding the human.
The database of manipulator configurations is established offline using forward kinematics to capture the relationship between the task and configuration spaces. This allows the OMRM to quickly provide multiple reconfiguration options for a desired end-effector position.
By combining the A* path planning and the OMRM, the proposed hybrid algorithm can plan safe manipulator motions that avoid collisions with human operators throughout the task execution.
The researchers validate their approach through extensive numerical simulations and physical experiments, comparing it to state-of-the-art methods like integrating uncertainty-aware human motion prediction and whole-body trajectory planning for mobile manipulators. The results demonstrate the efficiency and effectiveness of their hybrid motion planning algorithm.
Critical Analysis
The proposed algorithm addresses an important challenge in enabling safe collaboration between industrial manipulators and human operators. By decoupling the path planning and manipulator reconfiguration, the approach can provide real-time performance, which is crucial for practical applications.
However, the paper does not fully address the limitations of the pre-computed configuration database. While this approach is efficient, the database may not capture all possible configurations, especially for complex manipulators with many degrees of freedom. Additionally, the database generation process could be computationally expensive for large-scale problems.
Another potential issue is the reliance on accurate models of the human operator's position and motion. In real-world scenarios, predicting human behavior can be highly uncertain, which could impact the algorithm's ability to plan truly safe motions. Integrating more robust human motion prediction could be an area for future research.
Overall, the proposed hybrid algorithm represents a promising step towards enabling safe human-robot collaboration in intelligent remanufacturing and similar applications. Further refinements and extensions to address the identified limitations could further improve the algorithm's practicality and robustness.
Conclusion
This research presents an efficient hybrid motion planning algorithm that combines task-space path planning and online manipulator reconfiguration to enable safe collaboration between industrial robots and human operators. By decoupling the end-effector path planning and the manipulator body collision avoidance, the approach can provide real-time performance while ensuring the safety of human workers.
The key contributions of this work include the innovative use of the A* algorithm for end-effector path planning and the OMRM for manipulator reconfiguration. The pre-computed database of configurations allows for fast selection of suitable alternatives to avoid collisions. Extensive simulations and experiments validate the effectiveness of the proposed approach.
While the current implementation has some limitations, this research represents an important step forward in enabling more seamless and safe human-robot collaboration in intelligent remanufacturing and other industrial settings. Further advancements in areas like robust human motion prediction could help refine and expand the capabilities of this hybrid motion planning framework.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Integrating Uncertainty-Aware Human Motion Prediction into Graph-Based Manipulator Motion Planning
Wansong Liu, Kareem Eltouny, Sibo Tian, Xiao Liang, Minghui Zheng
0
0
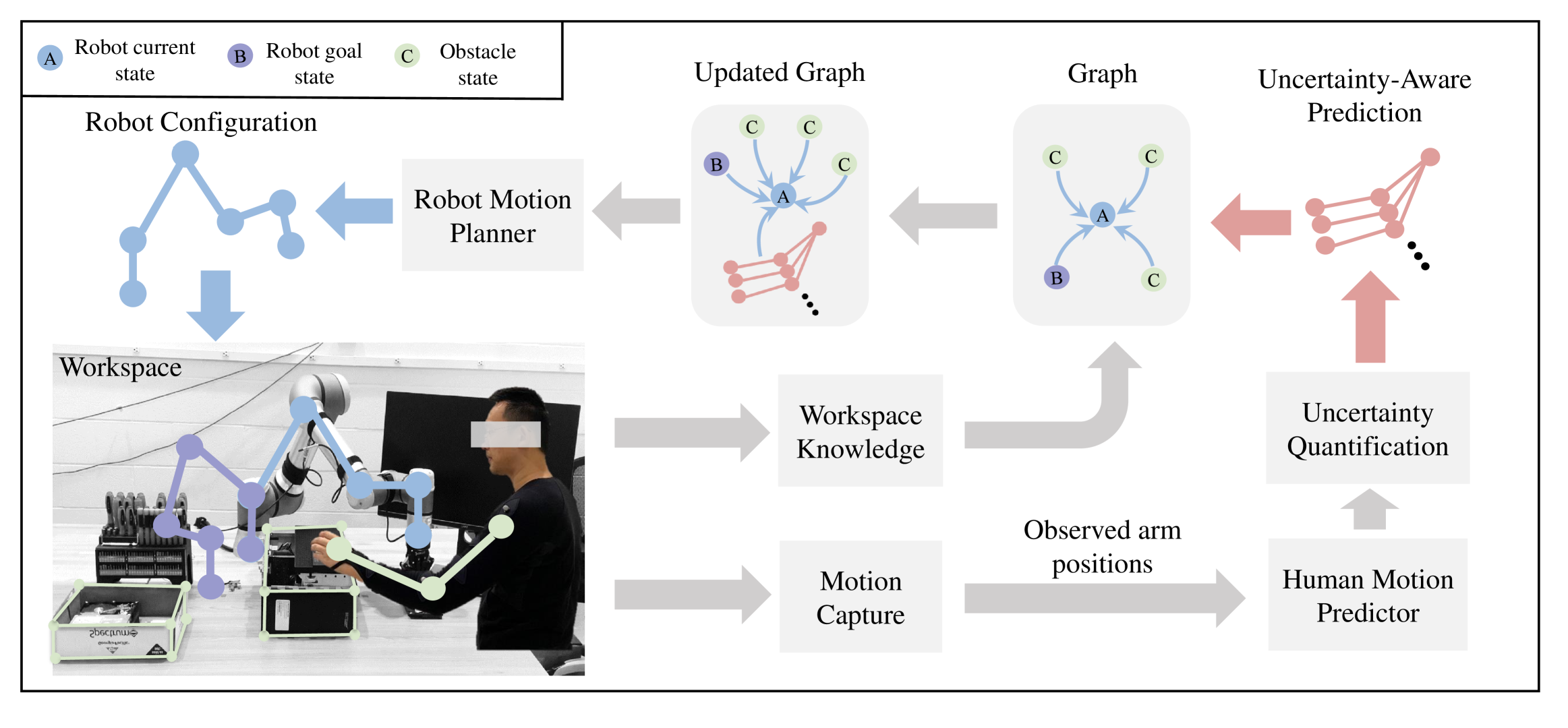
There has been a growing utilization of industrial robots as complementary collaborators for human workers in re-manufacturing sites. Such a human-robot collaboration (HRC) aims to assist human workers in improving the flexibility and efficiency of labor-intensive tasks. In this paper, we propose a human-aware motion planning framework for HRC to effectively compute collision-free motions for manipulators when conducting collaborative tasks with humans. We employ a neural human motion prediction model to enable proactive planning for manipulators. Particularly, rather than blindly trusting and utilizing predicted human trajectories in the manipulator planning, we quantify uncertainties of the neural prediction model to further ensure human safety. Moreover, we integrate the uncertainty-aware prediction into a graph that captures key workspace elements and illustrates their interconnections. Then a graph neural network is leveraged to operate on the constructed graph. Consequently, robot motion planning considers both the dependencies among all the elements in the workspace and the potential influence of future movements of human workers. We experimentally validate the proposed planning framework using a 6-degree-of-freedom manipulator in a shared workspace where a human is performing disassembling tasks. The results demonstrate the benefits of our approach in terms of improving the smoothness and safety of HRC. A brief video introduction of this work is available as the supplemental materials.
5/17/2024

Task and Motion Planning for Execution in the Real
Tianyang Pan, Rahul Shome, Lydia E. Kavraki
0
0
Task and motion planning represents a powerful set of hybrid planning methods that combine reasoning over discrete task domains and continuous motion generation. Traditional reasoning necessitates task domain models and enough information to ground actions to motion planning queries. Gaps in this knowledge often arise from sources like occlusion or imprecise modeling. This work generates task and motion plans that include actions cannot be fully grounded at planning time. During execution, such an action is handled by a provided human-designed or learned closed-loop behavior. Execution combines offline planned motions and online behaviors till reaching the task goal. Failures of behaviors are fed back as constraints to find new plans. Forty real-robot trials and motivating demonstrations are performed to evaluate the proposed framework and compare against state-of-the-art. Results show faster execution time, less number of actions, and more success in problems where diverse gaps arise. The experiment data is shared for researchers to simulate these settings. The work shows promise in expanding the applicable class of realistic partially grounded problems that robots can address.
6/14/2024
🧠
Optimal Whole Body Trajectory Planning for Mobile Manipulators in Planetary Exploration and Construction
Federica Storiale, Enrico Ferrentino, Federico Salvioli, Konstantinos Kapellos, Pasquale Chiacchio
0
0
Space robotics poses unique challenges arising from the limitation of energy and computational resources, and the complexity of the environment and employed platforms. At the control center, offline motion planning is fundamental in the computation of optimized trajectories accounting for the system's constraints. Smooth movements, collision and forbidden areas avoidance, target visibility and energy consumption are all important factors to consider to be able to generate feasible and optimal plans. When mobile manipulators (terrestrial, aerial) are employed, the base and the arm movements are often separately planned, ultimately resulting in sub-optimal solutions. We propose an Optimal Whole Body Planner (OptiWB) based on Discrete Dynamic Programming (DDP) and optimal interpolation. Kinematic redundancy is exploited for collision and forbidden areas avoidance, and to improve target illumination and visibility from onboard cameras. The planner, implemented in ROS (Robot Operating System), interfaces 3DROCS, a mission planner used in several programs of the European Space Agency (ESA) to support planetary exploration surface missions and part of the ExoMars Rover's planning software. The proposed approach is exercised on a simplified version of the Analog-1 Interact rover by ESA, a 7-DOFs robotic arm mounted on a four wheels non-holonomic platform.
5/24/2024
🛸
Task-Driven Computational Framework for Simultaneously Optimizing Design and Mounted Pose of Modular Reconfigurable Manipulators
Maolin Lei, Edoardo Romiti, Arturo Laurenz, Nikos G. Tsagarakis
0
0
Modular reconfigurable manipulators enable quick adaptation and versatility to address different application environments and tailor to the specific requirements of the tasks. Task performance significantly depends on the manipulator's mounted pose and morphology design, therefore posing the need of methodologies for selecting suitable modular robot configurations and mounted pose that can address the specific task requirements and required performance. Morphological changes in modular robots can be derived through a discrete optimization process involving the selective addition or removal of modules. In contrast, the adjustment of the mounted pose operates within a continuous space, allowing for smooth and precise alterations in both orientation and position. This work introduces a computational framework that simultaneously optimizes modular manipulators' mounted pose and morphology. The core of the work is that we design a mapping function that textit{implicitly} captures the morphological state of manipulators in the continuous space. This transformation function unifies the optimization of mounted pose and morphology within a continuous space. Furthermore, our optimization framework incorporates a array of performance metrics, such as minimum joint effort and maximum manipulability, and considerations for trajectory execution error and physical and safety constraints. To highlight our method's benefits, we compare it with previous methods that framed such problem as a combinatorial optimization problem and demonstrate its practicality in selecting the modular robot configuration for executing a drilling task with the CONCERT modular robotic platform.
5/6/2024