ICAL: Continual Learning of Multimodal Agents by Transforming Trajectories into Actionable Insights
2406.14596
0
0

Abstract
Large-scale generative language and vision-language models (LLMs and VLMs) excel in few-shot in-context learning for decision making and instruction following. However, they require high-quality exemplar demonstrations to be included in their context window. In this work, we ask: Can LLMs and VLMs generate their own prompt examples from generic, sub-optimal demonstrations? We propose In-Context Abstraction Learning (ICAL), a method that builds a memory of multimodal experience insights from sub-optimal demonstrations and human feedback. Given a noisy demonstration in a new domain, VLMs abstract the trajectory into a general program by fixing inefficient actions and annotating cognitive abstractions: task relationships, object state changes, temporal subgoals, and task construals. These abstractions are refined and adapted interactively through human feedback while the agent attempts to execute the trajectory in a similar environment. The resulting abstractions, when used as exemplars in the prompt, significantly improve decision-making in retrieval-augmented LLM and VLM agents. Our ICAL agent surpasses the state-of-the-art in dialogue-based instruction following in TEACh, multimodal web agents in VisualWebArena, and action anticipation in Ego4D. In TEACh, we achieve a 12.6% improvement in goal-condition success. In VisualWebArena, our task success rate improves over the SOTA from 14.3% to 22.7%. In Ego4D action forecasting, we improve over few-shot GPT-4V and remain competitive with supervised models. We show finetuning our retrieval-augmented in-context agent yields additional improvements. Our approach significantly reduces reliance on expert-crafted examples and consistently outperforms in-context learning from action plans that lack such insights.
Create account to get full access
Overview
- This paper presents a method called ICAL (Continual Learning of Multimodal Agents by Transforming Trajectories into Actionable Insights) for enabling continual learning in multimodal agents.
- Continual learning is the ability of an AI system to learn and adapt over time without forgetting previous knowledge.
- The ICAL approach aims to transform agent trajectories (sequences of actions and observations) into actionable insights that can be used to update the agent's knowledge and skills.
Plain English Explanation
The paper describes a way to help AI systems, like virtual assistants or robots, continuously learn and improve over time, rather than becoming stuck with a fixed set of knowledge and abilities. The key idea is to take the sequences of actions and observations that the AI agent experiences as it interacts with the world, and transform that information into useful insights that the agent can then use to update its own understanding and decision-making.
This is an important problem because we want AI systems to be able to adapt and grow, rather than becoming outdated or inflexible. By continuously learning from their experiences, the AI agents can expand their knowledge and skills to handle new situations and tasks. The ICAL paper provides a framework for enabling this kind of continual learning in multimodal agents, which are AI systems that can perceive and interact with the world through multiple senses, like vision, audio, and touch.
Technical Explanation
The ICAL method works by first encoding the agent's trajectory data (sequences of actions and observations) using a transformer-based model. This allows the system to capture the structure and relationships within the trajectory data. The encoded trajectory information is then passed through a series of neural network modules to extract useful insights, such as what actions led to successful outcomes, what observations indicated important events, and how the agent's behavior changed over time.
These extracted insights are then used to update the agent's knowledge base and decision-making policies, enabling it to continually learn and improve. The Learnable Context Vector and Context Learning techniques are employed to help the agent effectively integrate the new insights with its existing knowledge.
The authors evaluate ICAL on several simulated environments and show that it outperforms traditional continual learning approaches in terms of retaining knowledge and adapting to new tasks. The Demonstration Augmentation and How Far Can Context Alignment Go techniques used in the ICAL framework also contribute to its strong performance.
Critical Analysis
The ICAL approach presents a promising direction for enabling continual learning in multimodal agents. By focusing on extracting actionable insights from agent trajectories, the method aims to overcome some of the challenges faced by other continual learning approaches, such as catastrophic forgetting and the inability to adapt to new tasks.
However, the paper does not address the potential limitations of the ICAL framework, such as the complexity of the neural network modules required to extract useful insights, the scalability of the approach to larger and more diverse datasets, and the potential for biases or errors in the extracted insights.
Additionally, the paper does not discuss the ethical implications of continually updating an agent's knowledge and decision-making policies, such as the potential for unintended consequences or the need for transparent and accountable AI systems.
Conclusion
The ICAL method represents an important advancement in the field of continual learning for multimodal agents. By transforming agent trajectories into actionable insights, the approach has the potential to enable AI systems to continuously learn and adapt, rather than becoming static and outdated. While the paper presents promising results, further research is needed to address the potential limitations and ethical considerations of this approach.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
AIM: Let Any Multi-modal Large Language Models Embrace Efficient In-Context Learning
Jun Gao, Qian Qiao, Ziqiang Cao, Zili Wang, Wenjie Li
0
0
In-context learning (ICL) facilitates Large Language Models (LLMs) exhibiting emergent ability on downstream tasks without updating billions of parameters. However, in the area of multi-modal Large Language Models (MLLMs), two problems hinder the application of multi-modal ICL: (1) Most primary MLLMs are only trained on single-image datasets, making them unable to read multi-modal demonstrations. (2) With the demonstrations increasing, thousands of visual tokens highly challenge hardware and degrade ICL performance. During preliminary explorations, we discovered that the inner LLM tends to focus more on the linguistic modality within multi-modal demonstrations to generate responses. Therefore, we propose a general and light-weighted framework textbf{AIM} to tackle the mentioned problems through textbf{A}ggregating textbf{I}mage information of textbf{M}ultimodal demonstrations to the dense latent space of the corresponding linguistic part. Specifically, AIM first uses the frozen backbone MLLM to read each image-text demonstration and extracts the vector representations on top of the text. These vectors naturally fuse the information of the image-text pair, and AIM transforms them into fused virtual tokens acceptable for the inner LLM via a trainable projection layer. Ultimately, these fused tokens function as variants of multi-modal demonstrations, fed into the MLLM to direct its response to the current query as usual. Because these fused tokens stem from the textual component of the image-text pair, a multi-modal demonstration is nearly reduced to a pure textual demonstration, thus seamlessly applying to any MLLMs. With its de facto MLLM frozen, AIM is parameter-efficient and we train it on public multi-modal web corpora which have nothing to do with downstream test tasks.
7/2/2024

Learnable In-Context Vector for Visual Question Answering
Yingzhe Peng, Chenduo Hao, Xu Yang, Jiawei Peng, Xinting Hu, Xin Geng
0
0
As language models continue to scale, Large Language Models (LLMs) have exhibited emerging capabilities in In-Context Learning (ICL), enabling them to solve language tasks by prefixing a few in-context demonstrations (ICDs) as context. Inspired by these advancements, researchers have extended these techniques to develop Large Multimodal Models (LMMs) with ICL capabilities. However, applying ICL usually faces two major challenges: 1) using more ICDs will largely increase the inference time and 2) the performance is sensitive to the selection of ICDs. These challenges are further exacerbated in LMMs due to the integration of multiple data types and the combinational complexity of multimodal ICDs. Recently, to address these challenges, some NLP studies introduce non-learnable In-Context Vectors (ICVs) which extract useful task information from ICDs into a single vector and then insert it into the LLM to help solve the corresponding task. However, although useful in simple NLP tasks, these non-learnable methods fail to handle complex multimodal tasks like Visual Question Answering (VQA). In this study, we propose textbf{Learnable ICV} (L-ICV) to distill essential task information from demonstrations, improving ICL performance in LMMs. Experiments show that L-ICV can significantly reduce computational costs while enhancing accuracy in VQA tasks compared to traditional ICL and other non-learnable ICV methods.
6/21/2024
🌀
In-context Learning Generalizes, But Not Always Robustly: The Case of Syntax
Aaron Mueller, Albert Webson, Jackson Petty, Tal Linzen
0
0
In-context learning (ICL) is now a common method for teaching large language models (LLMs) new tasks: given labeled examples in the input context, the LLM learns to perform the task without weight updates. Do models guided via ICL infer the underlying structure of the task defined by the context, or do they rely on superficial heuristics that only generalize to identically distributed examples? We address this question using transformations tasks and an NLI task that assess sensitivity to syntax - a requirement for robust language understanding. We further investigate whether out-of-distribution generalization can be improved via chain-of-thought prompting, where the model is provided with a sequence of intermediate computation steps that illustrate how the task ought to be performed. In experiments with models from the GPT, PaLM, and Llama 2 families, we find large variance across LMs. The variance is explained more by the composition of the pre-training corpus and supervision methods than by model size; in particular, models pre-trained on code generalize better, and benefit more from chain-of-thought prompting.
4/11/2024
New!Enhancing In-Context Learning via Implicit Demonstration Augmentation
Xiaoling Zhou, Wei Ye, Yidong Wang, Chaoya Jiang, Zhemg Lee, Rui Xie, Shikun Zhang
0
0
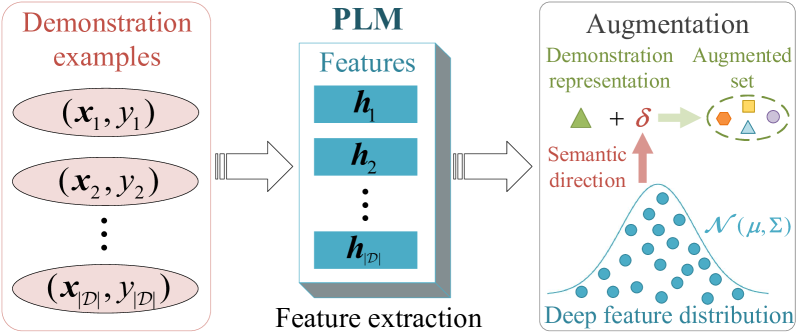
The emergence of in-context learning (ICL) enables large pre-trained language models (PLMs) to make predictions for unseen inputs without updating parameters. Despite its potential, ICL's effectiveness heavily relies on the quality, quantity, and permutation of demonstrations, commonly leading to suboptimal and unstable performance. In this paper, we tackle this challenge for the first time from the perspective of demonstration augmentation. Specifically, we start with enriching representations of demonstrations by leveraging their deep feature distribution. We then theoretically reveal that when the number of augmented copies approaches infinity, the augmentation is approximately equal to a novel logit calibration mechanism integrated with specific statistical properties. This insight results in a simple yet highly efficient method that significantly improves the average and worst-case accuracy across diverse PLMs and tasks. Moreover, our method effectively reduces performance variance among varying demonstrations, permutations, and templates, and displays the capability to address imbalanced class distributions.
7/2/2024