Identification For Control Based on Neural Networks: Approximately Linearizable Models

0
Sign in to get full access
Overview
- This paper proposes a method for identifying approximately linearizable models using neural networks for control applications.
- The approach involves learning a neural network model that captures the nonlinear dynamics of a system, and then using this model to design a controller.
- The key idea is to leverage the powerful function approximation capabilities of neural networks while maintaining the benefits of linear control techniques.
Plain English Explanation
The paper explores a way to model complex systems using neural networks, and then use that model to help control the system. The basic idea is that many real-world systems have some underlying linear structure, even if the overall behavior is nonlinear. By training a neural network to capture this nonlinear behavior, the researchers can then use standard linear control techniques on top of the neural network model to design a controller that works well.
The key advantage of this approach is that neural networks are very good at modeling complex, nonlinear relationships, which is often a challenge for traditional control methods. But by preserving the linear structure where possible, the researchers can still leverage the benefits of well-understood linear control theory, such as stability and robustness guarantees. This allows for a hybrid approach that combines the strengths of neural networks and linear control.
Technical Explanation
The paper presents a framework for identifying approximately linearizable models using neural networks for control applications. The key steps are:
-
Learning the Neural Network Model: The researchers train a neural network to learn the nonlinear dynamics of the system from input-output data. This neural network model captures the complex, nonlinear relationships in the system.
-
Extracting the Linear Dynamics: They then analyze the trained neural network to extract a linear approximation of the system dynamics around a given operating point. This linear model is used for controller design.
-
Controller Design: With the linear model, the researchers can apply standard linear control techniques, such as pole placement or LQR control, to design a controller that stabilizes the system.
The main insight is that many real-world systems exhibit approximate linear structure, even if the overall behavior is highly nonlinear. By leveraging this structure through the neural network model, the approach can achieve the best of both worlds: the power of neural networks for modeling complexity, and the benefits of linear control theory for designing robust and stable controllers.
Critical Analysis
The paper provides a well-designed methodology for identifying and exploiting approximately linear structure in complex, nonlinear systems using neural networks. The authors demonstrate the approach on several simulation examples and show promising results in terms of controller performance.
However, the paper does not address some important practical considerations:
- Generalization: It's unclear how well the approach would scale to high-dimensional or highly uncertain systems, where the linear approximation may not be accurate enough over a wide range of operating conditions.
- Robustness: The paper does not extensively analyze the robustness of the controllers to model mismatch or environmental disturbances, which is a key concern in real-world control applications.
- Computational Complexity: Training the neural network model and extracting the linear dynamics could be computationally expensive, especially for large-scale systems. The scalability of the approach needs further investigation.
Additionally, the paper does not compare the proposed method to other hybrid approaches that combine neural networks and linear control, which would help contextualize the contributions and limitations of this specific technique.
Overall, the paper presents an interesting and potentially useful framework for control-oriented system identification using neural networks, but further research is needed to address the practical challenges and benchmark the approach against alternative methods.
Conclusion
This paper introduces a novel approach for identifying approximately linearizable models using neural networks, with the goal of leveraging the powerful function approximation capabilities of neural networks while maintaining the benefits of linear control techniques. The key idea is to train a neural network to capture the nonlinear dynamics of a system, and then extract a linear approximation from the trained model to design a controller.
The proposed framework provides a promising way to combine the strengths of neural networks and linear control, which could be particularly useful for modeling and controlling complex, nonlinear systems. However, the paper also highlights several important practical considerations that warrant further investigation, such as generalization, robustness, and computational complexity.
Overall, this research represents an interesting step forward in the field of neural network-based control, and the techniques presented here could have significant implications for a wide range of control applications in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Identification For Control Based on Neural Networks: Approximately Linearizable Models
Maxime Thieffry, Alexandre Hache, Mohamed Yagoubi, Philippe Chevrel
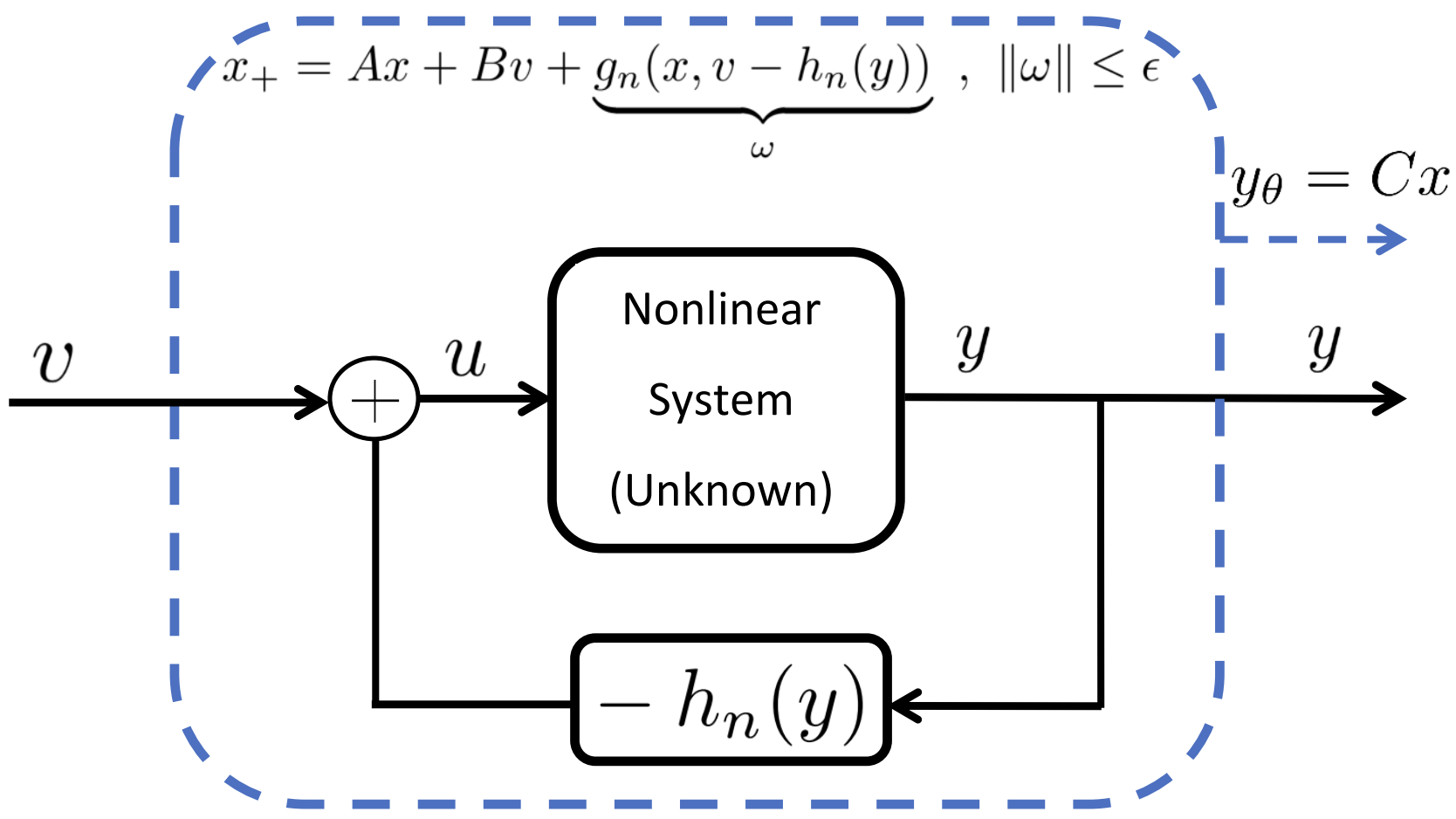
This work presents a control-oriented identification scheme for efficient control design and stability analysis of nonlinear systems. Neural networks are used to identify a discrete-time nonlinear state-space model to approximate time-domain input-output behavior of a nonlinear system. The network is constructed such that the identified model is approximately linearizable by feedback, ensuring that the control law trivially follows from the learning stage. After the identification and quasi-linearization procedures, linear control theory comes at hand to design robust controllers and study stability of the closed-loop system. The effectiveness and interest of the methodology are illustrated throughout the paper on popular benchmarks for system identification.
Read more10/4/2024
0
A neural network-based approach to hybrid systems identification for control
Filippo Fabiani, Bartolomeo Stellato, Daniele Masti, Paul J. Goulart
We consider the problem of designing a machine learning-based model of an unknown dynamical system from a finite number of (state-input)-successor state data points, such that the model obtained is also suitable for optimal control design. We propose a specific neural network (NN) architecture that yields a hybrid system with piecewise-affine dynamics that is differentiable with respect to the network's parameters, thereby enabling the use of derivative-based training procedures. We show that a careful choice of our NN's weights produces a hybrid system model with structural properties that are highly favourable when used as part of a finite horizon optimal control problem (OCP). Specifically, we show that optimal solutions with strong local optimality guarantees can be computed via nonlinear programming, in contrast to classical OCPs for general hybrid systems which typically require mixed-integer optimization. In addition to being well-suited for optimal control design, numerical simulations illustrate that our NN-based technique enjoys very similar performance to state-of-the-art system identification methodologies for hybrid systems and it is competitive on nonlinear benchmarks.
Read more4/3/2024

0
Learning Unstable Continuous-Time Stochastic Linear Control Systems
Reza Sadeghi Hafshejani, Mohamad Kazem Shirani Fradonbeh
We study the problem of system identification for stochastic continuous-time dynamics, based on a single finite-length state trajectory. We present a method for estimating the possibly unstable open-loop matrix by employing properly randomized control inputs. Then, we establish theoretical performance guarantees showing that the estimation error decays with trajectory length, a measure of excitability, and the signal-to-noise ratio, while it grows with dimension. Numerical illustrations that showcase the rates of learning the dynamics, will be provided as well. To perform the theoretical analysis, we develop new technical tools that are of independent interest. That includes non-asymptotic stochastic bounds for highly non-stationary martingales and generalized laws of iterated logarithms, among others.
Read more9/18/2024
0
Lyapunov-stable Neural Control for State and Output Feedback: A Novel Formulation for Efficient Synthesis and Verification
Lujie Yang, Hongkai Dai, Zhouxing Shi, Cho-Jui Hsieh, Russ Tedrake, Huan Zhang
Learning-based neural network (NN) control policies have shown impressive empirical performance in a wide range of tasks in robotics and control. However, formal (Lyapunov) stability guarantees over the region-of-attraction (ROA) for NN controllers with nonlinear dynamical systems are challenging to obtain, and most existing approaches rely on expensive solvers such as sums-of-squares (SOS), mixed-integer programming (MIP), or satisfiability modulo theories (SMT). In this paper, we demonstrate a new framework for learning NN controllers together with Lyapunov certificates using fast empirical falsification and strategic regularizations. We propose a novel formulation that defines a larger verifiable region-of-attraction (ROA) than shown in the literature, and refines the conventional restrictive constraints on Lyapunov derivatives to focus only on certifiable ROAs. The Lyapunov condition is rigorously verified post-hoc using branch-and-bound with scalable linear bound propagation-based NN verification techniques. The approach is efficient and flexible, and the full training and verification procedure is accelerated on GPUs without relying on expensive solvers for SOS, MIP, nor SMT. The flexibility and efficiency of our framework allow us to demonstrate Lyapunov-stable output feedback control with synthesized NN-based controllers and NN-based observers with formal stability guarantees, for the first time in literature. Source code at https://github.com/Verified-Intelligence/Lyapunov_Stable_NN_Controllers
Read more6/6/2024