A neural network-based approach to hybrid systems identification for control
2404.01814
0
0
Abstract
We consider the problem of designing a machine learning-based model of an unknown dynamical system from a finite number of (state-input)-successor state data points, such that the model obtained is also suitable for optimal control design. We propose a specific neural network (NN) architecture that yields a hybrid system with piecewise-affine dynamics that is differentiable with respect to the network's parameters, thereby enabling the use of derivative-based training procedures. We show that a careful choice of our NN's weights produces a hybrid system model with structural properties that are highly favourable when used as part of a finite horizon optimal control problem (OCP). Specifically, we show that optimal solutions with strong local optimality guarantees can be computed via nonlinear programming, in contrast to classical OCPs for general hybrid systems which typically require mixed-integer optimization. In addition to being well-suited for optimal control design, numerical simulations illustrate that our NN-based technique enjoys very similar performance to state-of-the-art system identification methodologies for hybrid systems and it is competitive on nonlinear benchmarks.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This paper presents a neural network-based approach for identifying and modeling hybrid systems, which are systems that exhibit both continuous and discrete dynamics.
- The proposed method aims to enable more effective control of hybrid systems by accurately capturing their complex behavior.
- The authors demonstrate the effectiveness of their approach through experiments on several benchmark hybrid system examples.
Plain English Explanation
Hybrid systems are a type of dynamic system that exhibit both continuous and discrete behaviors. For example, a thermostat controlling a heater would be considered a hybrid system - the temperature (a continuous variable) changes continuously, but the heater turns on and off (a discrete switching behavior). Modeling and controlling hybrid systems can be challenging because of the interplay between the continuous and discrete components.
In this paper, the authors propose a novel neural network-based method for identifying and modeling hybrid systems. The key idea is to use a neural network to learn a mathematical representation of the hybrid system's dynamics directly from observed data, without requiring an explicit model of the system's structure. This data-driven approach can be more flexible and easier to apply than traditional model-based methods, which often require significant manual effort to derive an accurate model.
The authors demonstrate their approach on several benchmark hybrid system examples, showing that the neural network model can accurately capture the systems' complex behaviors. This improved modeling capability could enable more effective control of hybrid systems in a variety of applications, such as robotics, transportation, and energy systems.
Technical Explanation
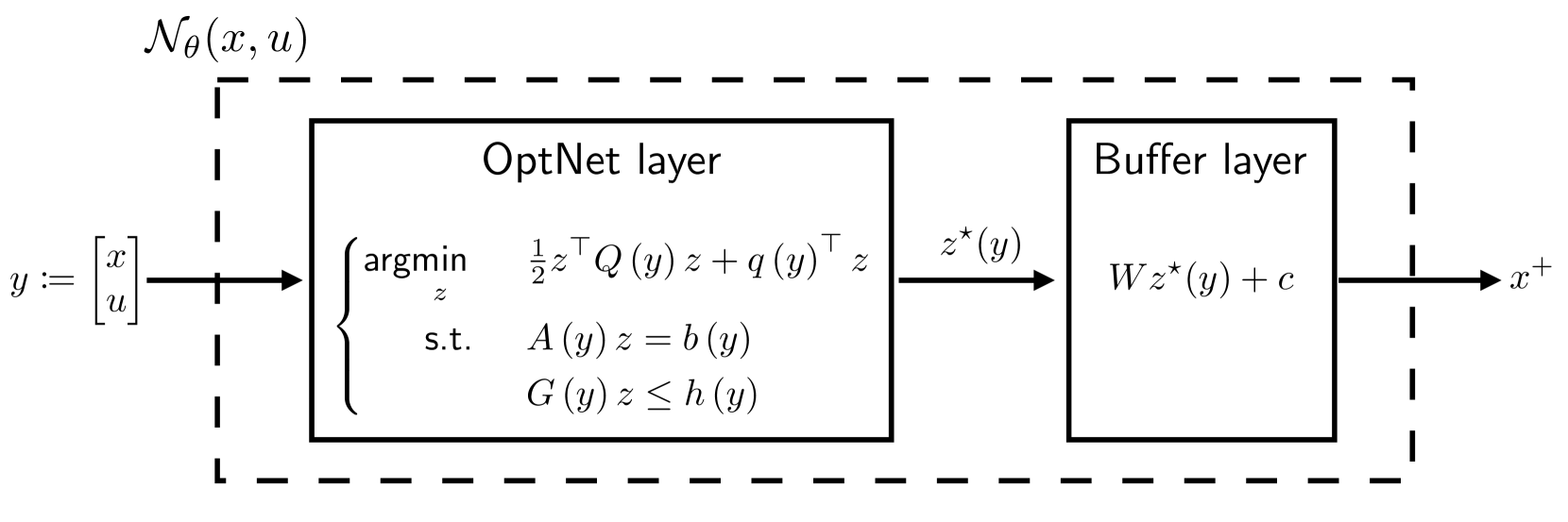
The core of the authors' approach is a neural network architecture that can learn a hybrid system model directly from data. The network takes as input the current state of the system (e.g., temperature, position) and outputs predictions of the next state and the discrete mode (e.g., heater on/off).
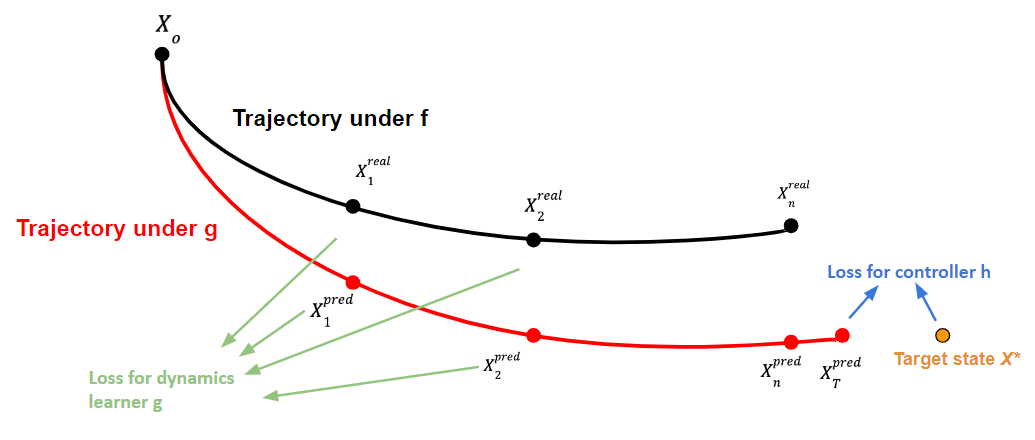
To train the network, the authors use a combination of supervised learning, where the network is trained to match known input-output pairs, and reinforcement learning, where the network is rewarded for making accurate predictions. This hybrid training approach allows the network to learn complex hybrid dynamics without requiring extensive manual modeling.
The authors evaluate their approach on several benchmark hybrid systems, including a thermostat-controlled heater, a bouncing ball, and a switched mass-spring-damper system. They show that the neural network model can accurately predict the future state of the system, even when the discrete mode changes unexpectedly. This modeling capability could enable more effective control of hybrid systems compared to traditional methods.
Critical Analysis
The authors acknowledge several limitations and areas for future work. First, the neural network model may struggle to generalize to hybrid systems with very complex or high-dimensional dynamics. More research is needed to understand the network's capabilities and limitations in this regard.
Additionally, the training process relies on having access to high-quality labeled data, which may not always be available in practical applications. The authors suggest exploring unsupervised or semi-supervised learning approaches to address this challenge.
Finally, while the authors demonstrate the modeling accuracy of their approach, they do not extensively evaluate its impact on control performance or computational efficiency. Further research is needed to understand the real-world implications and tradeoffs of this neural network-based hybrid system identification method.
Conclusion
This paper presents a novel neural network-based approach for identifying and modeling hybrid systems, which are characterized by the interplay of continuous and discrete dynamics. The authors demonstrate the effectiveness of their method on several benchmark examples, showing that the neural network can accurately capture the complex behaviors of these systems.
This work has the potential to enable more efficient and effective control of hybrid systems in a wide range of applications, from robotics and transportation to energy systems. However, further research is needed to address the limitations and explore the practical implications of this approach more thoroughly.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Neural Control: Concurrent System Identification and Control Learning with Neural ODE
Cheng Chi
0
0
Controlling continuous-time dynamical systems is generally a two step process: first, identify or model the system dynamics with differential equations, then, minimize the control objectives to achieve optimal control function and optimal state trajectories. However, any inaccuracy in dynamics modeling will lead to sub-optimality in the resulting control function. To address this, we propose a neural ODE based method for controlling unknown dynamical systems, denoted as Neural Control (NC), which combines dynamics identification and optimal control learning using a coupled neural ODE. Through an intriguing interplay between the two neural networks in coupled neural ODE structure, our model concurrently learns system dynamics as well as optimal controls that guides towards target states. Our experiments demonstrate the effectiveness of our model for learning optimal control of unknown dynamical systems. Codes available at https://github.com/chichengmessi/neural_ode_control/tree/main
4/23/2024
🧠
Solving Elliptic Optimal Control Problems via Neural Networks and Optimality System
Yongcheng Dai, Bangti Jin, Ramesh Sau, Zhi Zhou
0
0
In this work, we investigate a neural network based solver for optimal control problems (without / with box constraint) for linear and semilinear second-order elliptic problems. It utilizes a coupled system derived from the first-order optimality system of the optimal control problem, and employs deep neural networks to represent the solutions to the reduced system. We present an error analysis of the scheme, and provide $L^2(Omega)$ error bounds on the state, control and adjoint in terms of neural network parameters (e.g., depth, width, and parameter bounds) and the numbers of sampling points. The main tools in the analysis include offset Rademacher complexity and boundedness and Lipschitz continuity of neural network functions. We present several numerical examples to illustrate the method and compare it with two existing ones.
5/9/2024
🛸
Learning Governing Equations of Unobserved States in Dynamical Systems
Gevik Grigorian, Sandip V. George, Simon Arridge
0
0
Data-driven modelling and scientific machine learning have been responsible for significant advances in determining suitable models to describe data. Within dynamical systems, neural ordinary differential equations (ODEs), where the system equations are set to be governed by a neural network, have become a popular tool for this challenge in recent years. However, less emphasis has been placed on systems that are only partially-observed. In this work, we employ a hybrid neural ODE structure, where the system equations are governed by a combination of a neural network and domain-specific knowledge, together with symbolic regression (SR), to learn governing equations of partially-observed dynamical systems. We test this approach on two case studies: A 3-dimensional model of the Lotka-Volterra system and a 5-dimensional model of the Lorenz system. We demonstrate that the method is capable of successfully learning the true underlying governing equations of unobserved states within these systems, with robustness to measurement noise.
5/8/2024
🚀
Learning-Based Optimal Control with Performance Guarantees for Unknown Systems with Latent States
Robert Lefringhausen, Supitsana Srithasan, Armin Lederer, Sandra Hirche
0
0
As control engineering methods are applied to increasingly complex systems, data-driven approaches for system identification appear as a promising alternative to physics-based modeling. While the Bayesian approaches prevalent for safety-critical applications usually rely on the availability of state measurements, the states of a complex system are often not directly measurable. It may then be necessary to jointly estimate the dynamics and the latent state, making the quantification of uncertainties and the design of controllers with formal performance guarantees considerably more challenging. This paper proposes a novel method for the computation of an optimal input trajectory for unknown nonlinear systems with latent states based on a combination of particle Markov chain Monte Carlo methods and scenario theory. Probabilistic performance guarantees are derived for the resulting input trajectory, and an approach to validate the performance of arbitrary control laws is presented. The effectiveness of the proposed method is demonstrated in a numerical simulation.
4/17/2024