Increasing SLAM Pose Accuracy by Ground-to-Satellite Image Registration
2404.09169
0
0

Abstract
Vision-based localization for autonomous driving has been of great interest among researchers. When a pre-built 3D map is not available, the techniques of visual simultaneous localization and mapping (SLAM) are typically adopted. Due to error accumulation, visual SLAM (vSLAM) usually suffers from long-term drift. This paper proposes a framework to increase the localization accuracy by fusing the vSLAM with a deep-learning-based ground-to-satellite (G2S) image registration method. In this framework, a coarse (spatial correlation bound check) to fine (visual odometry consistency check) method is designed to select the valid G2S prediction. The selected prediction is then fused with the SLAM measurement by solving a scaled pose graph problem. To further increase the localization accuracy, we provide an iterative trajectory fusion pipeline. The proposed framework is evaluated on two well-known autonomous driving datasets, and the results demonstrate the accuracy and robustness in terms of vehicle localization.
Create account to get full access
Overview
- This paper proposes a method to improve the accuracy of Simultaneous Localization and Mapping (SLAM) systems by registering ground-level camera images with satellite imagery.
- The goal is to leverage the global context provided by satellite data to correct for drift and other errors in SLAM-based pose estimation.
- The approach involves extracting visual features from both ground and satellite images, then aligning them to estimate the vehicle's global pose.
Plain English Explanation
Autonomous vehicles and robots that navigate using SLAM often struggle with accurately determining their position over long distances. This is because SLAM systems, which build 3D maps of an environment from sensor data, can accumulate small errors over time that lead to significant drift in the estimated pose (position and orientation) of the vehicle.
The researchers in this paper have developed a technique to improve SLAM-based pose estimation by matching camera images captured at ground level with corresponding satellite imagery. Satellite imagery provides a bird's-eye view of the environment that can give the SLAM system a broader, global context to correct for localization errors.
The key idea is to extract visual features, such as distinctive landmarks or patterns, from both the ground-level camera images and the overhead satellite data. These features are then aligned to estimate the vehicle's global position and orientation, which can be fed back into the SLAM system to improve the accuracy of the pose estimates.
By incorporating this satellite-based correction, the researchers show they can significantly reduce the drift and localization errors that typically plague SLAM-based navigation systems, particularly in large-scale outdoor environments. This could have important applications for autonomous driving, drone navigation, and other robotics use cases where accurate localization is critical.
Technical Explanation
The key technical components of the proposed approach are:
-
Feature extraction: The researchers use convolutional neural networks to detect and describe visual features in both the ground-level camera images and the satellite imagery. This allows them to identify corresponding landmarks or patterns across the two data sources.
-
Feature matching: They then employ geometric matching algorithms to align the extracted visual features between the ground and satellite images. This provides an estimate of the vehicle's global pose relative to the satellite data.
-
SLAM fusion: The estimated global pose is fused with the local pose estimates from the SLAM system to correct for drift and improve the overall accuracy of the vehicle's localization.
The researchers evaluate their approach on several outdoor datasets, including urban and rural environments. They demonstrate that incorporating the satellite-based pose correction can significantly reduce the translational and rotational errors compared to standalone SLAM systems, especially over long trajectories.
Critical Analysis
One limitation of the proposed method is its reliance on having access to high-quality satellite imagery that aligns well with the ground-level camera data. In some environments, such as densely vegetated areas or urban canyons with tall buildings, the satellite view may be occluded or distorted, making the image registration more challenging.
Additionally, the feature extraction and matching algorithms used in the paper, while state-of-the-art, may still struggle with ambiguous or repetitive visual features that can lead to incorrect alignments between the ground and satellite data. Further research into more robust and adaptive matching techniques could help address this issue.
It would also be valuable to explore the computational and memory requirements of the proposed approach, as the need to process both ground and satellite imagery in real-time could be a practical concern for some autonomous systems with limited resources.
Overall, this research presents a promising direction for improving the accuracy and reliability of SLAM-based localization by leveraging complementary data sources like satellite imagery. However, further developments and field testing will be needed to fully realize the potential of this approach in complex, real-world environments.
Conclusion
This paper introduces a novel technique to enhance the performance of SLAM systems by registering ground-level camera images with satellite imagery. The key insight is that satellite data can provide a global context to help correct for the drift and errors that often accumulate in SLAM-based pose estimation, particularly over long trajectories.
The proposed method demonstrates significant improvements in translational and rotational accuracy compared to standalone SLAM, with potential applications for autonomous driving, drone navigation, and other robotic systems that rely on accurate localization. While the approach has some limitations, such as the need for high-quality satellite data, it represents an important step towards more robust and reliable SLAM-based navigation in large-scale, outdoor environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛠️
SLAM for Indoor Mapping of Wide Area Construction Environments
Vincent Ress, Wei Zhang, David Skuddis, Norbert Haala, Uwe Soergel
0
0
Simultaneous localization and mapping (SLAM), i.e., the reconstruction of the environment represented by a (3D) map and the concurrent pose estimation, has made astonishing progress. Meanwhile, large scale applications aiming at the data collection in complex environments like factory halls or construction sites are becoming feasible. However, in contrast to small scale scenarios with building interiors separated to single rooms, shop floors or construction areas require measures at larger distances in potentially texture less areas under difficult illumination. Pose estimation is further aggravated since no GNSS measures are available as it is usual for such indoor applications. In our work, we realize data collection in a large factory hall by a robot system equipped with four stereo cameras as well as a 3D laser scanner. We apply our state-of-the-art LiDAR and visual SLAM approaches and discuss the respective pros and cons of the different sensor types for trajectory estimation and dense map generation in such an environment. Additionally, dense and accurate depth maps are generated by 3D Gaussian splatting, which we plan to use in the context of our project aiming on the automatic construction and site monitoring.
4/29/2024
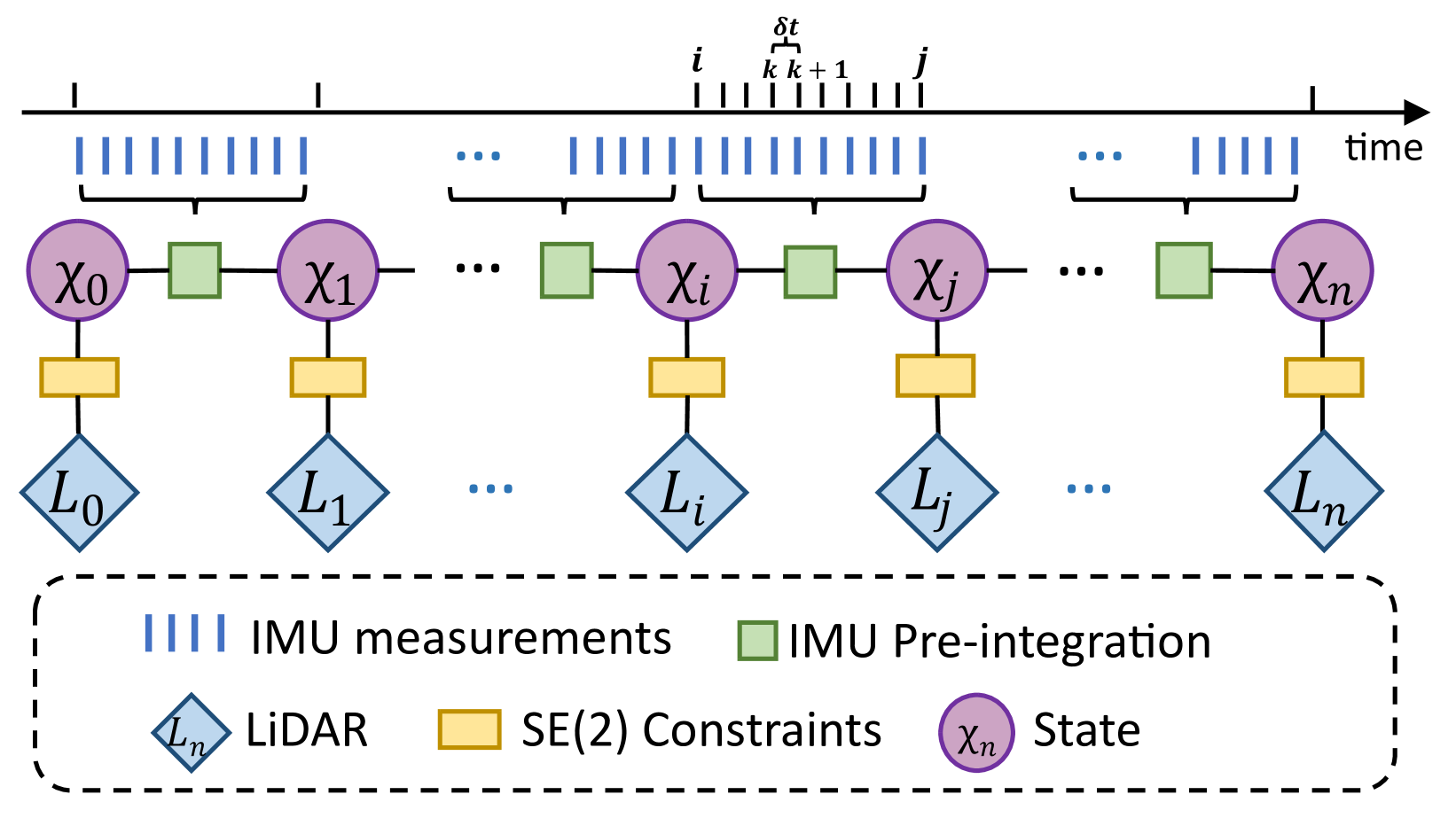
Versatile LiDAR-Inertial Odometry With SE (2) Constraints for Ground Vehicles
Jiaying Chen, Han Wang, Minghui Hu, Ponnuthurai Nagaratnam Suganthan
0
0
LiDAR SLAM has become one of the major localization systems for ground vehicles since LiDAR Odometry And Mapping (LOAM). Many extension works on LOAM mainly leverage one specific constraint to improve the performance, e.g., information from on-board sensors such as loop closure and inertial state; prior conditions such as ground level and motion dynamics. In many robotic applications, these conditions are often known partially, hence a SLAM system can be a comprehensive problem due to the existence of numerous constraints. Therefore, we can achieve a better SLAM result by fusing them properly. In this paper, we propose a hybrid LiDAR-inertial SLAM framework that leverages both the on-board perception system and prior information such as motion dynamics to improve localization performance. In particular, we consider the case for ground vehicles, which are commonly used for autonomous driving and warehouse logistics. We present a computationally efficient LiDAR-inertial odometry method that directly parameterizes ground vehicle poses on SE(2). The out-of-SE(2) motion perturbations are not neglected but incorporated into an integrated noise term of a novel SE(2)-constraints model. For odometric measurement processing, we propose a versatile, tightly coupled LiDAR-inertial odometry to achieve better pose estimation than traditional LiDAR odometry. Thorough experiments are performed to evaluate our proposed method's performance in different scenarios, including localization for both indoor and outdoor environments. The proposed method achieves superior performance in accuracy and robustness.
4/3/2024

Outlier-Robust Long-Term Robotic Mapping Leveraging Ground Segmentation
Hyungtae Lim
0
0
Despite the remarkable advancements in deep learning-based perception technologies and simultaneous localization and mapping (SLAM), one can face the failure of these approaches when robots encounter scenarios outside their modeled experiences (here, the term modeling encompasses both conventional pattern finding and data-driven approaches). In particular, because learning-based methods are prone to catastrophic failure when operated in untrained scenes, there is still a demand for conventional yet robust approaches that work out of the box in diverse scenarios, such as real-world robotic services and SLAM competitions. In addition, the dynamic nature of real-world environments, characterized by changing surroundings over time and the presence of moving objects, leads to undesirable data points that hinder a robot from localization and path planning. Consequently, methodologies that enable long-term map management, such as multi-session SLAM and static map building, become essential. Therefore, to achieve a robust long-term robotic mapping system that can work out of the box, first, I propose (i) fast and robust ground segmentation to reject the ground points, which are featureless and thus not helpful for localization and mapping. Then, by employing the concept of graduated non-convexity (GNC), I propose (ii) outlier-robust registration with ground segmentation that overcomes the presence of gross outliers within the feature matching results, and (iii) hierarchical multi-session SLAM that not only uses our proposed GNC-based registration but also employs a GNC solver to be robust against outlier loop candidates. Finally, I propose (iv) instance-aware static map building that can handle the presence of moving objects in the environment based on the observation that most moving objects in urban environments are inevitably in contact with the ground.
5/29/2024
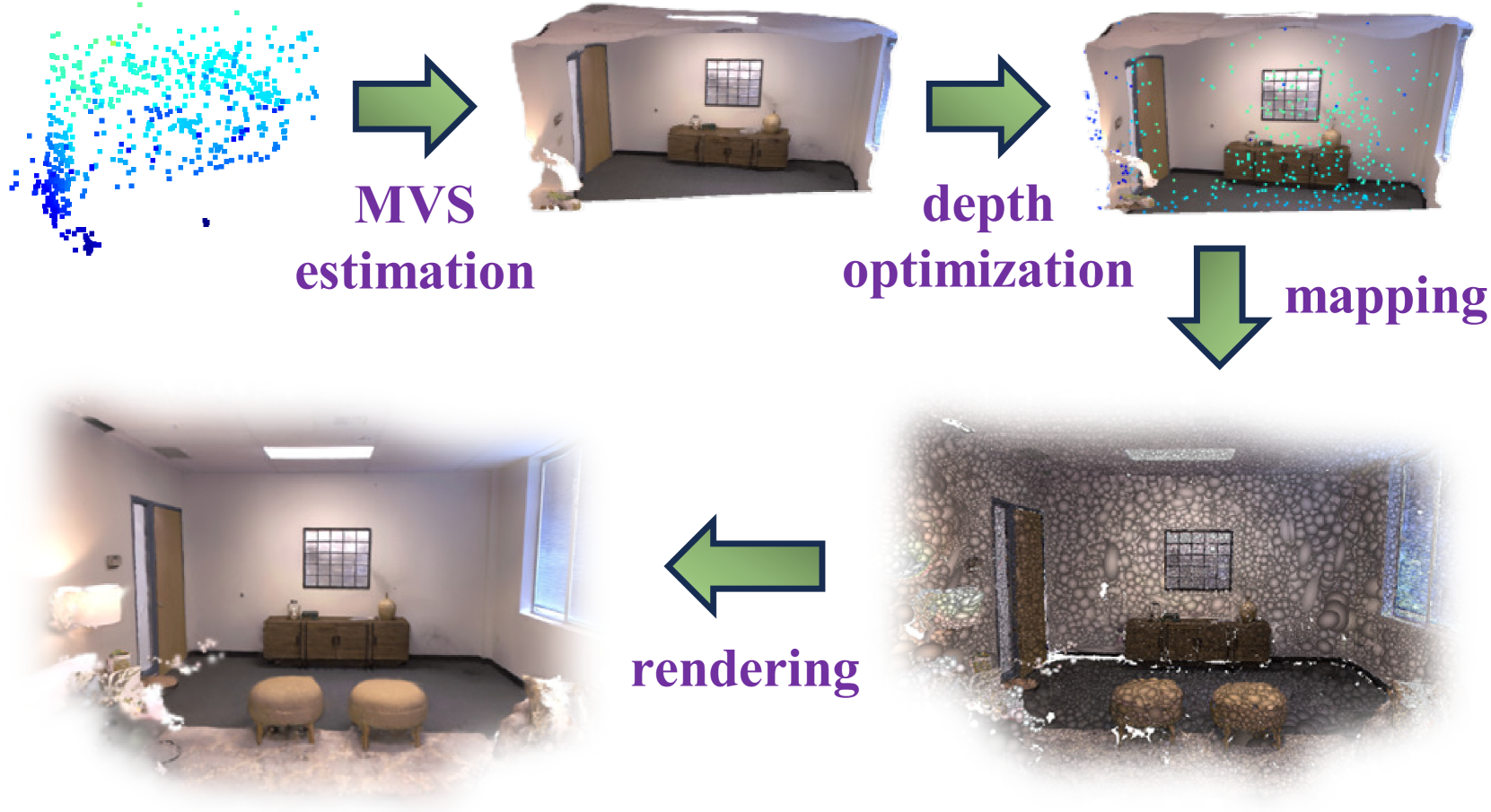
MGS-SLAM: Monocular Sparse Tracking and Gaussian Mapping with Depth Smooth Regularization
Pengcheng Zhu, Yaoming Zhuang, Baoquan Chen, Li Li, Chengdong Wu, Zhanlin Liu
0
0
This letter introduces a novel framework for dense Visual Simultaneous Localization and Mapping (VSLAM) based on Gaussian Splatting. Recently Gaussian Splatting-based SLAM has yielded promising results, but rely on RGB-D input and is weak in tracking. To address these limitations, we uniquely integrates advanced sparse visual odometry with a dense Gaussian Splatting scene representation for the first time, thereby eliminating the dependency on depth maps typical of Gaussian Splatting-based SLAM systems and enhancing tracking robustness. Here, the sparse visual odometry tracks camera poses in RGB stream, while Gaussian Splatting handles map reconstruction. These components are interconnected through a Multi-View Stereo (MVS) depth estimation network. And we propose a depth smooth loss to reduce the negative effect of estimated depth maps. Furthermore, the consistency in scale between the sparse visual odometry and the dense Gaussian map is preserved by Sparse-Dense Adjustment Ring (SDAR). We have evaluated our system across various synthetic and real-world datasets. The accuracy of our pose estimation surpasses existing methods and achieves state-of-the-art performance. Additionally, it outperforms previous monocular methods in terms of novel view synthesis fidelity, matching the results of neural SLAM systems that utilize RGB-D input.
5/13/2024