2DLIW-SLAM:2D LiDAR-Inertial-Wheel Odometry with Real-Time Loop Closure
2404.07644
0
0

Abstract
Due to budgetary constraints, indoor navigation typically employs 2D LiDAR rather than 3D LiDAR. However, the utilization of 2D LiDAR in Simultaneous Localization And Mapping (SLAM) frequently encounters challenges related to motion degeneracy, particularly in geometrically similar environments. To address this problem, this paper proposes a robust, accurate, and multi-sensor-fused 2D LiDAR SLAM system specifically designed for indoor mobile robots. To commence, the original LiDAR data undergoes meticulous processing through point and line extraction. Leveraging the distinctive characteristics of indoor environments, line-line constraints are established to complement other sensor data effectively, thereby augmenting the overall robustness and precision of the system. Concurrently, a tightly-coupled front-end is created, integrating data from the 2D LiDAR, IMU, and wheel odometry, thus enabling real-time state estimation. Building upon this solid foundation, a novel global feature point matching-based loop closure detection algorithm is proposed. This algorithm proves highly effective in mitigating front-end accumulated errors and ultimately constructs a globally consistent map. The experimental results indicate that our system fully meets real-time requirements. When compared to Cartographer, our system not only exhibits lower trajectory errors but also demonstrates stronger robustness, particularly in degeneracy problem.
Create account to get full access
Overview
- This paper presents a 2D LiDAR-Inertial-Wheel Odometry (2DLIW-SLAM) system that provides real-time loop closure for simultaneous localization and mapping (SLAM).
- The system combines data from a 2D LiDAR sensor, an inertial measurement unit (IMU), and wheel encoders to accurately track the robot's position and build a map of its environment.
- A key innovation is the integration of a real-time loop closure algorithm that can detect when the robot revisits a previously mapped area, allowing it to correct its trajectory and build a globally consistent map.
Plain English Explanation
The 2DLIW-SLAM system is designed to help robots navigate and understand their surroundings more effectively. It uses data from three main sources: a 2D laser scanner (LiDAR), an inertial measurement unit (IMU), and wheel encoders that track the robot's movements.
By combining information from these different sensors, the system can keep track of the robot's location and orientation, and build a detailed map of its environment. This is known as simultaneous localization and mapping (SLAM). The key innovation in this paper is the addition of a "loop closure" algorithm that can detect when the robot revisits a place it has been before.
This loop closure capability is important because it allows the system to correct any errors that may have accumulated in the robot's estimated position and orientation over time. By recognizing when the robot is back in a familiar area, the system can adjust the map and the robot's estimated location to ensure everything is accurate and consistent.
The result is a SLAM system that can provide real-time, reliable tracking of the robot's movements and a high-quality map of its surroundings, even in complex environments. This could be very useful for applications like autonomous navigation, search and rescue, or industrial automation, where accurate localization and mapping are critical.
Technical Explanation
The 2DLIW-SLAM system leverages a tightly-coupled sensor fusion approach to combine data from a 2D LiDAR, an IMU, and wheel encoders. This combination of sensors provides robust odometry estimates even in challenging environments.
The key components of the 2DLIW-SLAM system include:
-
Lidar-Inertial-Wheel Odometry: The system uses a state estimation framework to fuse the LiDAR, IMU, and wheel encoder data into a consistent estimate of the robot's 2D pose (position and orientation).
-
Loop Closure Detection: A real-time loop closure detection algorithm is employed to identify when the robot revisits a previously mapped area. This allows the system to correct accumulated odometry errors and maintain a globally consistent map.
-
Mapping and Localization: The system builds a 2D occupancy grid map of the environment using the corrected pose estimates. Localization is performed by matching incoming LiDAR scans to this map.
-
Optimization: A bundle adjustment-based optimization is used to further refine the trajectory and map, leveraging the loop closure constraints.
The authors evaluate the 2DLIW-SLAM system on both simulated and real-world datasets, demonstrating its ability to achieve accurate localization and mapping in a variety of environments, including those with dynamic obstacles. The system is shown to outperform state-of-the-art LiDAR-only and LiDAR-IMU SLAM approaches in terms of trajectory accuracy and mapping quality.
Critical Analysis
The 2DLIW-SLAM system presents a comprehensive and well-designed solution for 2D SLAM using a combination of LiDAR, IMU, and wheel odometry. The authors have clearly put a lot of thought into the system design and have incorporated several state-of-the-art techniques, such as the tightly-coupled sensor fusion, real-time loop closure, and bundle adjustment-based optimization.
One potential limitation of the system is that it is designed for 2D environments, which may limit its applicability in more complex, 3D environments. Additionally, the reliance on wheel encoders may make the system less robust in scenarios with wheel slip or uneven terrain.
The authors do not provide a detailed analysis of the computational complexity or real-time performance of the system, which would be important considerations for practical deployment. Further investigation into the system's scalability and suitability for resource-constrained platforms would be valuable.
Overall, the 2DLIW-SLAM system represents a significant contribution to the field of SLAM and could be a useful tool for a variety of robotic applications, particularly in structured, 2D environments.
Conclusion
The 2DLIW-SLAM system presented in this paper offers a robust and innovative approach to simultaneous localization and mapping using a combination of LiDAR, IMU, and wheel odometry sensors. By integrating a real-time loop closure algorithm, the system can maintain a globally consistent map and accurately track the robot's position, even in complex environments.
The technical insights and experimental results demonstrated in this paper suggest that the 2DLIW-SLAM system could be a valuable tool for a wide range of robotic applications, such as autonomous navigation, search and rescue, and industrial automation, where reliable localization and mapping are critical. As the field of robotics continues to advance, innovative SLAM systems like this one will play an increasingly important role in enabling robots to better understand and navigate their surroundings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
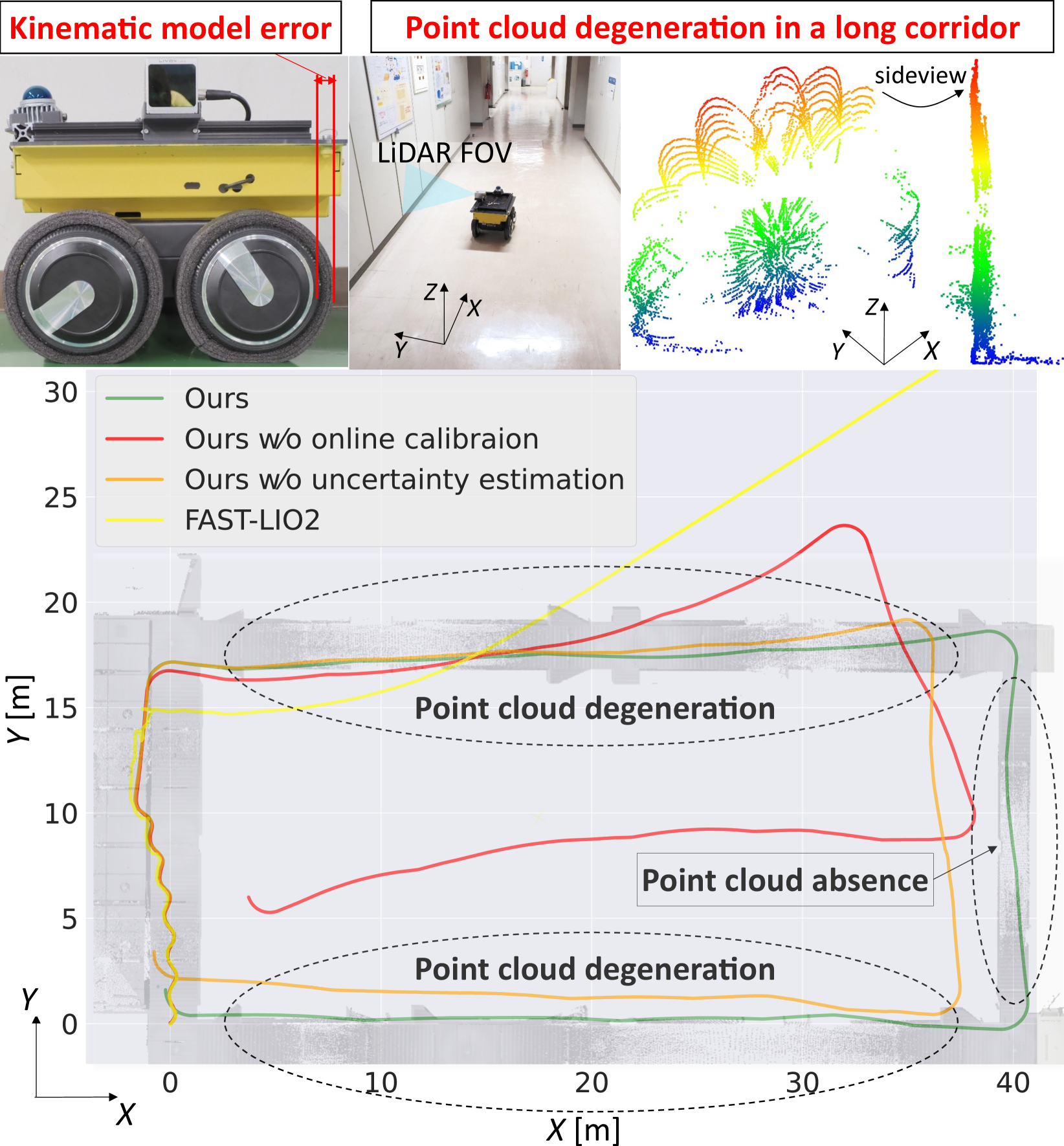
Tightly-Coupled LiDAR-IMU-Wheel Odometry with Online Calibration of a Kinematic Model for Skid-Steering Robots
Taku Okawara, Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno, Kentaro Uno, Kazuya Yoshida
0
0
Tunnels and long corridors are challenging environments for mobile robots because a LiDAR point cloud should degenerate in these environments. To tackle point cloud degeneration, this study presents a tightly-coupled LiDAR-IMU-wheel odometry algorithm with an online calibration for skid-steering robots. We propose a full linear wheel odometry factor, which not only serves as a motion constraint but also performs the online calibration of kinematic models for skid-steering robots. Despite the dynamically changing kinematic model (e.g., wheel radii changes caused by tire pressures) and terrain conditions, our method can address the model error via online calibration. Moreover, our method enables an accurate localization in cases of degenerated environments, such as long and straight corridors, by calibration while the LiDAR-IMU fusion sufficiently operates. Furthermore, we estimate the uncertainty (i.e., covariance matrix) of the wheel odometry online for creating a reasonable constraint. The proposed method is validated through three experiments. The first indoor experiment shows that the proposed method is robust in severe degeneracy cases (long corridors) and changes in the wheel radii. The second outdoor experiment demonstrates that our method accurately estimates the sensor trajectory despite being in rough outdoor terrain owing to online uncertainty estimation of wheel odometry. The third experiment shows the proposed online calibration enables robust odometry estimation in changing terrains.
4/4/2024
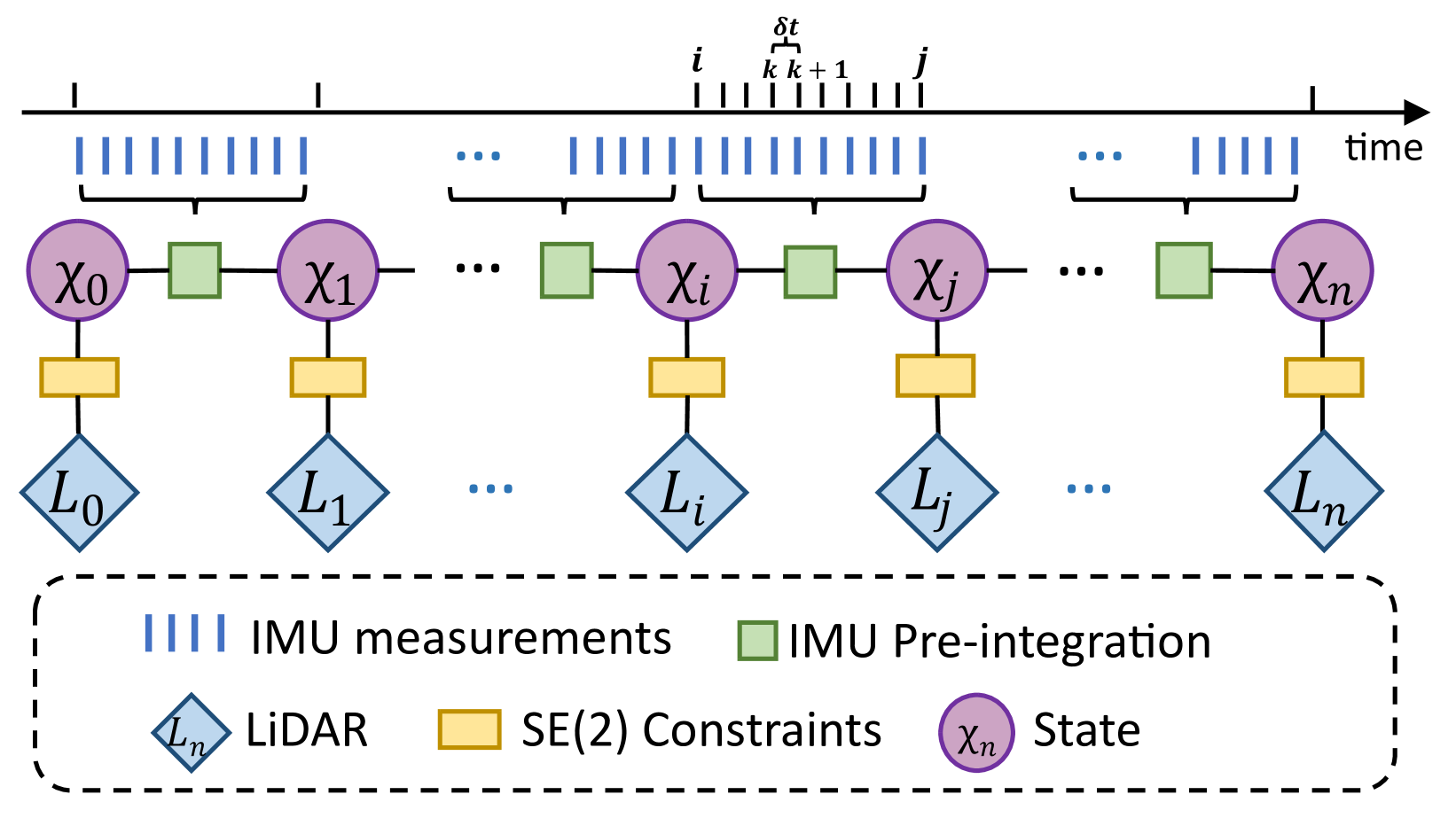
Versatile LiDAR-Inertial Odometry With SE (2) Constraints for Ground Vehicles
Jiaying Chen, Han Wang, Minghui Hu, Ponnuthurai Nagaratnam Suganthan
0
0
LiDAR SLAM has become one of the major localization systems for ground vehicles since LiDAR Odometry And Mapping (LOAM). Many extension works on LOAM mainly leverage one specific constraint to improve the performance, e.g., information from on-board sensors such as loop closure and inertial state; prior conditions such as ground level and motion dynamics. In many robotic applications, these conditions are often known partially, hence a SLAM system can be a comprehensive problem due to the existence of numerous constraints. Therefore, we can achieve a better SLAM result by fusing them properly. In this paper, we propose a hybrid LiDAR-inertial SLAM framework that leverages both the on-board perception system and prior information such as motion dynamics to improve localization performance. In particular, we consider the case for ground vehicles, which are commonly used for autonomous driving and warehouse logistics. We present a computationally efficient LiDAR-inertial odometry method that directly parameterizes ground vehicle poses on SE(2). The out-of-SE(2) motion perturbations are not neglected but incorporated into an integrated noise term of a novel SE(2)-constraints model. For odometric measurement processing, we propose a versatile, tightly coupled LiDAR-inertial odometry to achieve better pose estimation than traditional LiDAR odometry. Thorough experiments are performed to evaluate our proposed method's performance in different scenarios, including localization for both indoor and outdoor environments. The proposed method achieves superior performance in accuracy and robustness.
4/3/2024
Towards introspective loop closure in 4D radar SLAM
Maximilian Hilger, Vladim'ir Kubelka, Daniel Adolfsson, Henrik Andreasson, Achim J. Lilienthal
0
0
Imaging radar is an emerging sensor modality in the context of Localization and Mapping (SLAM), especially suitable for vision-obstructed environments. This article investigates the use of 4D imaging radars for SLAM and analyzes the challenges in robust loop closure. Previous work indicates that 4D radars, together with inertial measurements, offer ample information for accurate odometry estimation. However, the low field of view, limited resolution, and sparse and noisy measurements render loop closure a significantly more challenging problem. Our work builds on the previous work - TBV SLAM - which was proposed for robust loop closure with 360$^circ$ spinning radars. This article highlights and addresses challenges inherited from a directional 4D radar, such as sparsity, noise, and reduced field of view, and discusses why the common definition of a loop closure is unsuitable. By combining multiple quality measures for accurate loop closure detection adapted to 4D radar data, significant results in trajectory estimation are achieved; the absolute trajectory error is as low as 0.46 m over a distance of 1.8 km, with consistent operation over multiple environments.
4/8/2024
Eigen Is All You Need: Efficient Lidar-Inertial Continuous-Time Odometry with Internal Association
Thien-Minh Nguyen, Xinhang Xu, Tongxing Jin, Yizhuo Yang, Jianping Li, Shenghai Yuan, Lihua Xie
0
0
In this paper, we propose a continuous-time lidar-inertial odometry (CT-LIO) system named SLICT2, which promotes two main insights. One, contrary to conventional wisdom, CT-LIO algorithm can be optimized by linear solvers in only a few iterations, which is more efficient than commonly used nonlinear solvers. Two, CT-LIO benefits more from the correct association than the number of iterations. Based on these ideas, we implement our method with a customized solver where the feature association process is performed immediately after each incremental step, and the solution can converge within a few iterations. Our implementation can achieve real-time performance with a high density of control points while yielding competitive performance in highly dynamical motion scenarios. We demonstrate the advantages of our method by comparing with other existing state-of-the-art CT-LIO methods. The source code will be released for the benefit of the community.
6/10/2024