Versatile LiDAR-Inertial Odometry With SE (2) Constraints for Ground Vehicles
2404.01584
0
0
Abstract
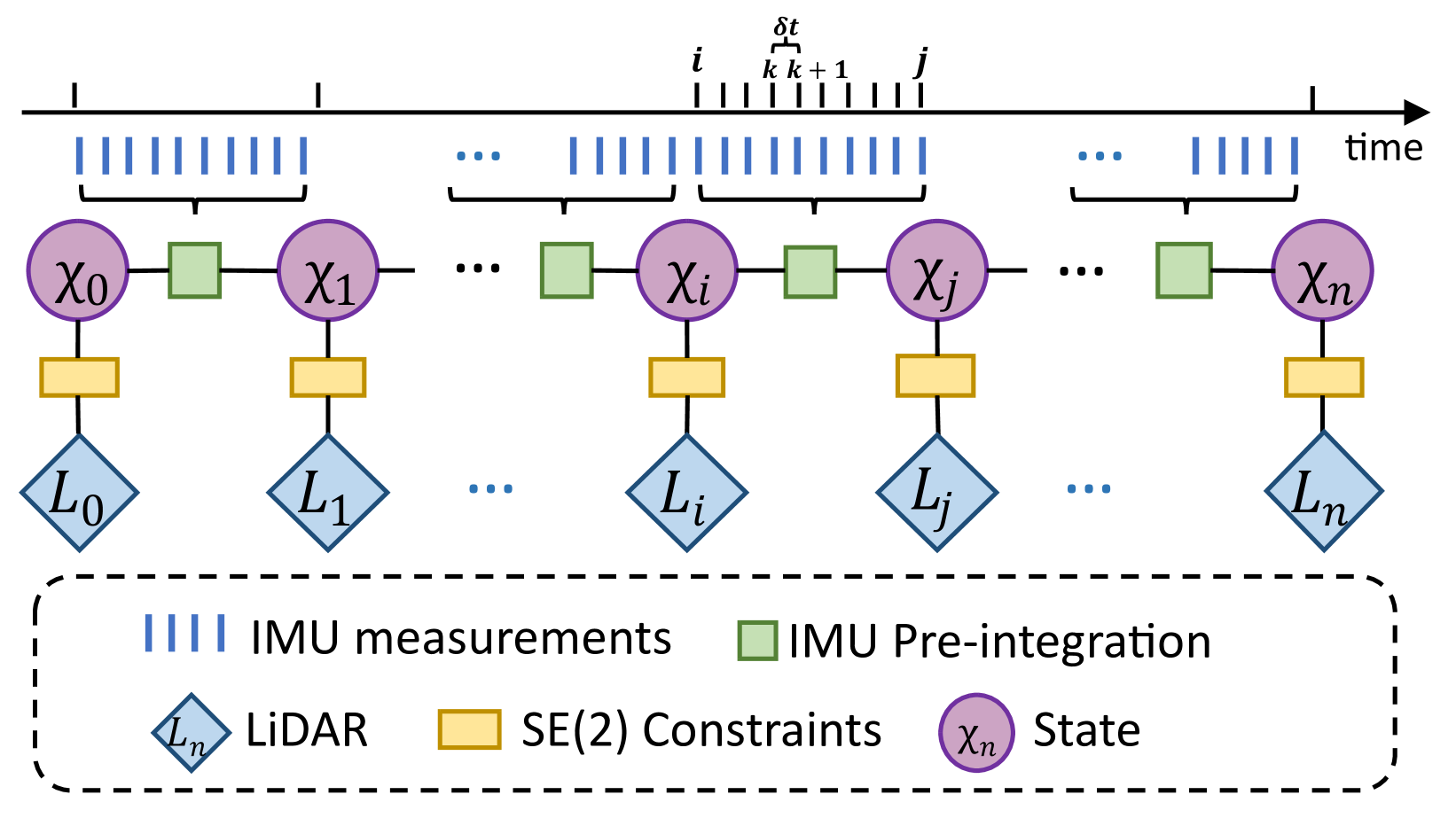
LiDAR SLAM has become one of the major localization systems for ground vehicles since LiDAR Odometry And Mapping (LOAM). Many extension works on LOAM mainly leverage one specific constraint to improve the performance, e.g., information from on-board sensors such as loop closure and inertial state; prior conditions such as ground level and motion dynamics. In many robotic applications, these conditions are often known partially, hence a SLAM system can be a comprehensive problem due to the existence of numerous constraints. Therefore, we can achieve a better SLAM result by fusing them properly. In this paper, we propose a hybrid LiDAR-inertial SLAM framework that leverages both the on-board perception system and prior information such as motion dynamics to improve localization performance. In particular, we consider the case for ground vehicles, which are commonly used for autonomous driving and warehouse logistics. We present a computationally efficient LiDAR-inertial odometry method that directly parameterizes ground vehicle poses on SE(2). The out-of-SE(2) motion perturbations are not neglected but incorporated into an integrated noise term of a novel SE(2)-constraints model. For odometric measurement processing, we propose a versatile, tightly coupled LiDAR-inertial odometry to achieve better pose estimation than traditional LiDAR odometry. Thorough experiments are performed to evaluate our proposed method's performance in different scenarios, including localization for both indoor and outdoor environments. The proposed method achieves superior performance in accuracy and robustness.
Create account to get full access
Overview
- This research paper presents a versatile LiDAR-inertial odometry (LIO) system for ground vehicles that incorporates SE(2) constraints to improve accuracy and robustness.
- The proposed LIO system leverages both LiDAR and inertial measurement unit (IMU) data to estimate the 6-degree-of-freedom (6DoF) pose of the vehicle.
- The SE(2) constraints, which restrict the vehicle's motion to the 2D plane, are integrated into the optimization problem to enhance the system's performance on ground vehicles.
Plain English Explanation
The research paper describes a navigation system for ground vehicles that combines data from two different sensors - a LiDAR (Light Detection and Ranging) sensor and an IMU (Inertial Measurement Unit). The goal is to accurately track the 3D position and orientation of the vehicle as it moves.
The key innovation is the use of "SE(2) constraints" - this means the system is designed to work specifically for vehicles that are constrained to move on a flat, 2D surface, rather than being able to move freely in 3D space. By incorporating this prior knowledge about the vehicle's motion, the researchers were able to improve the accuracy and robustness of the navigation system.
Tightly-Coupled LiDAR-IMU-Wheel Odometry Online and Localization and Offline Mapping in High Voltage Substations with Rough Terrain are other examples of research that leverage sensor fusion techniques for vehicle navigation.
Technical Explanation
The proposed LIO system combines LiDAR and IMU data through an optimization-based approach. The LiDAR data is used to construct a local point cloud map, which is then aligned with the global map using the current state estimate. The IMU data is used to propagate the state estimate forward in time between LiDAR scans.
The key innovation is the integration of SE(2) constraints into the optimization problem. These constraints restrict the vehicle's motion to the 2D plane, reflecting the fact that ground vehicles are typically constrained to planar motion. By incorporating this prior knowledge, the researchers were able to improve the accuracy and robustness of the system, particularly in challenging environments such as BundledSLAM: An Accurate Visual SLAM System Using Multiple Keyframes.
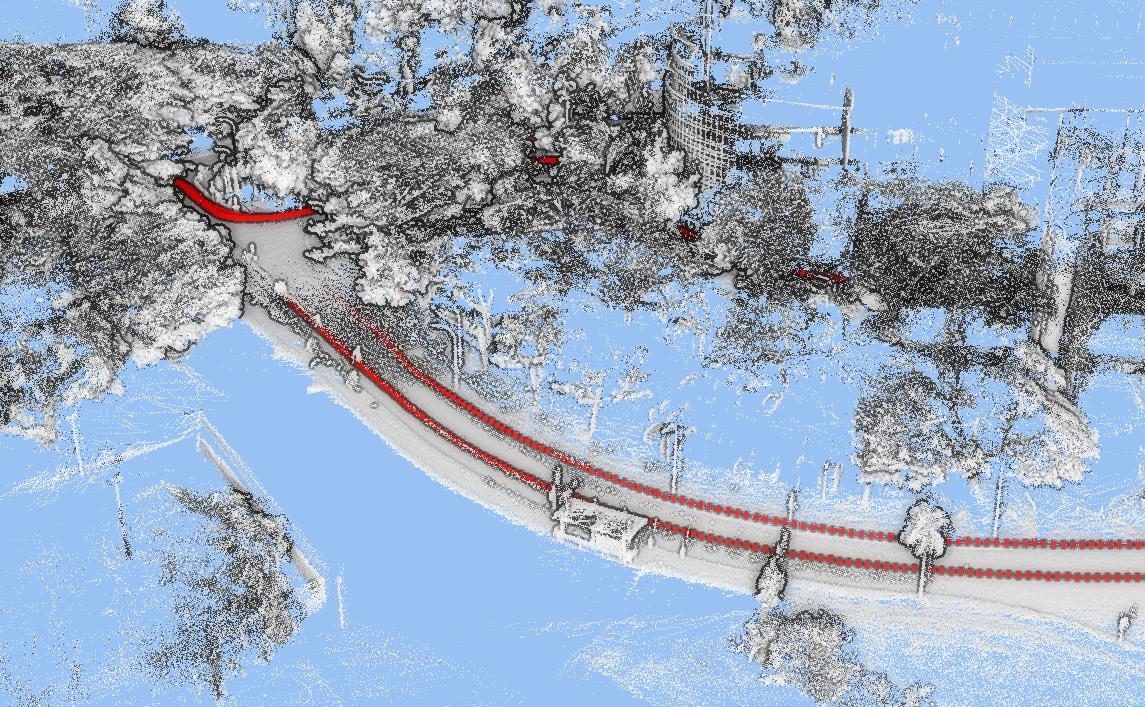
The effectiveness of the proposed system is demonstrated through extensive experiments on both simulated and real-world datasets, including comparisons to state-of-the-art LIO methods. The results show that the SE(2)-constrained LIO system outperforms the unconstrained approach, particularly in terms of drift reduction and robustness to sensor noise and environmental challenges.
Critical Analysis
The paper provides a thorough evaluation of the proposed LIO system and acknowledges several limitations and areas for future research. One potential concern is the reliance on accurate global maps, which may not be available in all scenarios. The researchers suggest incorporating online map building capabilities to address this issue.
Additionally, the paper does not address the Formal Verification of Robustness and Resilience for Learning-Enabled State Estimation of the system, which is an important consideration for real-world deployment. Further research on the system's robustness to sensor failures, environmental changes, and other disturbances would be valuable.
Conclusion
This research paper presents a versatile LiDAR-inertial odometry system that leverages SE(2) constraints to improve accuracy and robustness for ground vehicles. The key innovation is the integration of these constraints into the optimization problem, which leverages the prior knowledge of the vehicle's planar motion. The proposed system outperforms state-of-the-art LIO methods in various experiments, demonstrating its potential for Simultaneous State Estimation and Contact Detection for Legged Robots and other ground-based applications. Further research on online mapping and system robustness would enhance the system's real-world applicability.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

2DLIW-SLAM:2D LiDAR-Inertial-Wheel Odometry with Real-Time Loop Closure
Bin Zhang, Zexin Peng, Bi Zeng, Junjie Lu
0
0
Due to budgetary constraints, indoor navigation typically employs 2D LiDAR rather than 3D LiDAR. However, the utilization of 2D LiDAR in Simultaneous Localization And Mapping (SLAM) frequently encounters challenges related to motion degeneracy, particularly in geometrically similar environments. To address this problem, this paper proposes a robust, accurate, and multi-sensor-fused 2D LiDAR SLAM system specifically designed for indoor mobile robots. To commence, the original LiDAR data undergoes meticulous processing through point and line extraction. Leveraging the distinctive characteristics of indoor environments, line-line constraints are established to complement other sensor data effectively, thereby augmenting the overall robustness and precision of the system. Concurrently, a tightly-coupled front-end is created, integrating data from the 2D LiDAR, IMU, and wheel odometry, thus enabling real-time state estimation. Building upon this solid foundation, a novel global feature point matching-based loop closure detection algorithm is proposed. This algorithm proves highly effective in mitigating front-end accumulated errors and ultimately constructs a globally consistent map. The experimental results indicate that our system fully meets real-time requirements. When compared to Cartographer, our system not only exhibits lower trajectory errors but also demonstrates stronger robustness, particularly in degeneracy problem.
4/24/2024
Eigen Is All You Need: Efficient Lidar-Inertial Continuous-Time Odometry with Internal Association
Thien-Minh Nguyen, Xinhang Xu, Tongxing Jin, Yizhuo Yang, Jianping Li, Shenghai Yuan, Lihua Xie
0
0
In this paper, we propose a continuous-time lidar-inertial odometry (CT-LIO) system named SLICT2, which promotes two main insights. One, contrary to conventional wisdom, CT-LIO algorithm can be optimized by linear solvers in only a few iterations, which is more efficient than commonly used nonlinear solvers. Two, CT-LIO benefits more from the correct association than the number of iterations. Based on these ideas, we implement our method with a customized solver where the feature association process is performed immediately after each incremental step, and the solution can converge within a few iterations. Our implementation can achieve real-time performance with a high density of control points while yielding competitive performance in highly dynamical motion scenarios. We demonstrate the advantages of our method by comparing with other existing state-of-the-art CT-LIO methods. The source code will be released for the benefit of the community.
6/10/2024

Increasing SLAM Pose Accuracy by Ground-to-Satellite Image Registration
Yanhao Zhang, Yujiao Shi, Shan Wang, Ankit Vora, Akhil Perincherry, Yongbo Chen, Hongdong Li
0
0
Vision-based localization for autonomous driving has been of great interest among researchers. When a pre-built 3D map is not available, the techniques of visual simultaneous localization and mapping (SLAM) are typically adopted. Due to error accumulation, visual SLAM (vSLAM) usually suffers from long-term drift. This paper proposes a framework to increase the localization accuracy by fusing the vSLAM with a deep-learning-based ground-to-satellite (G2S) image registration method. In this framework, a coarse (spatial correlation bound check) to fine (visual odometry consistency check) method is designed to select the valid G2S prediction. The selected prediction is then fused with the SLAM measurement by solving a scaled pose graph problem. To further increase the localization accuracy, we provide an iterative trajectory fusion pipeline. The proposed framework is evaluated on two well-known autonomous driving datasets, and the results demonstrate the accuracy and robustness in terms of vehicle localization.
4/16/2024
💬
LIO-EKF: High Frequency LiDAR-Inertial Odometry using Extended Kalman Filters
Yibin Wu, Tiziano Guadagnino, Louis Wiesmann, Lasse Klingbeil, Cyrill Stachniss, Heiner Kuhlmann
0
0
Odometry estimation is crucial for every autonomous system requiring navigation in an unknown environment. In modern mobile robots, 3D LiDAR-inertial systems are often used for this task. By fusing LiDAR scans and IMU measurements, these systems can reduce the accumulated drift caused by sequentially registering individual LiDAR scans and provide a robust pose estimate. Although effective, LiDAR-inertial odometry systems require proper parameter tuning to be deployed. In this paper, we propose LIO-EKF, a tightly-coupled LiDAR-inertial odometry system based on point-to-point registration and the classical extended Kalman filter scheme. We propose an adaptive data association that considers the relative pose uncertainty, the map discretization errors, and the LiDAR noise. In this way, we can substantially reduce the parameters to tune for a given type of environment. The experimental evaluation suggests that the proposed system performs on par with the state-of-the-art LiDAR-inertial odometry pipelines but is significantly faster in computing the odometry. The source code of our implementation is publicly available (https://github.com/YibinWu/LIO-EKF).
5/9/2024