Inductive Global and Local Manifold Approximation and Projection

0
Sign in to get full access
Overview
- This paper presents a method for approximating and projecting high-dimensional data onto low-dimensional manifolds, which can be useful for tasks like dimensionality reduction and data visualization.
- The approach combines global and local manifold approximation techniques to capture both the overall structure and local details of the data.
- The method is "inductive," meaning it can be applied to new data points without needing to recompute the entire manifold representation.
Plain English Explanation
Many real-world datasets, such as images or sensor readings, exist in a high-dimensional space, making them difficult to visualize and analyze. Dimensionality reduction techniques can help by finding a lower-dimensional representation of the data that preserves important structures and relationships.
The authors of this paper developed a new method for this task, called "Inductive Global and Local Manifold Approximation and Projection" (IGLAMP). The key idea is to approximate the high-dimensional data as a manifold - a smooth, curved surface embedded in the higher-dimensional space. This manifold can then be projected down to a lower-dimensional space, allowing the data to be visualized and analyzed more effectively.
IGLAMP combines global and local approaches to manifold approximation. The global part captures the overall shape and structure of the data, while the local part focuses on preserving the fine-grained details and relationships between nearby data points. This hybrid approach allows IGLAMP to represent complex, non-linear data structures better than previous methods.
Importantly, IGLAMP is inductive, meaning it can be used to project new data points onto the learned manifold without having to recompute the entire representation. This makes it more practical for real-world applications, where the data may be continually updated.
Technical Explanation
The IGLAMP method works by first learning a global manifold approximation using techniques like UMAP or CBMAP. This captures the overall structure and low-dimensional embedding of the data.
Next, IGLAMP learns local manifold approximations around each data point. These local models capture the fine-grained details and relationships between neighboring points. The local and global approximations are then combined to produce the final low-dimensional projection of the data.
The inductive property of IGLAMP is achieved by learning a parametric model that can map new data points directly onto the manifold, without having to recompute the entire representation. This is done by training a neural network to learn the mapping from the high-dimensional input space to the low-dimensional manifold coordinates.
The authors evaluate IGLAMP on several benchmark datasets and compare its performance to other dimensionality reduction techniques, such as Probabilistic PCA and Interpretable Dimensionality Reduction. The results show that IGLAMP is able to capture complex data structures more effectively, while also providing an inductive, real-time projection capability.
Critical Analysis
The authors acknowledge that IGLAMP, like other manifold learning techniques, may struggle with data that does not truly lie on a low-dimensional manifold. In such cases, the manifold approximation may not be able to faithfully represent the full complexity of the data.
Additionally, the neural network used for the inductive mapping component of IGLAMP may require a significant amount of training data to learn an accurate projection function. This could limit the method's applicability to small or scarce datasets.
Further research could explore ways to improve the robustness of IGLAMP to non-manifold data, as well as techniques to reduce the training data requirements for the inductive mapping. Investigating the method's performance on real-world, high-impact applications would also be valuable.
Conclusion
The IGLAMP method presented in this paper offers a promising approach to dimensionality reduction and data visualization by combining global and local manifold approximation techniques. Its inductive property makes it well-suited for practical applications where the data may be continually updated.
While the method has some limitations, the authors' work represents an important advancement in the field of manifold learning. Further research and refinement of IGLAMP could lead to even more powerful and versatile tools for understanding and exploring complex, high-dimensional datasets.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Inductive Global and Local Manifold Approximation and Projection
Jungeum Kim, Xiao Wang
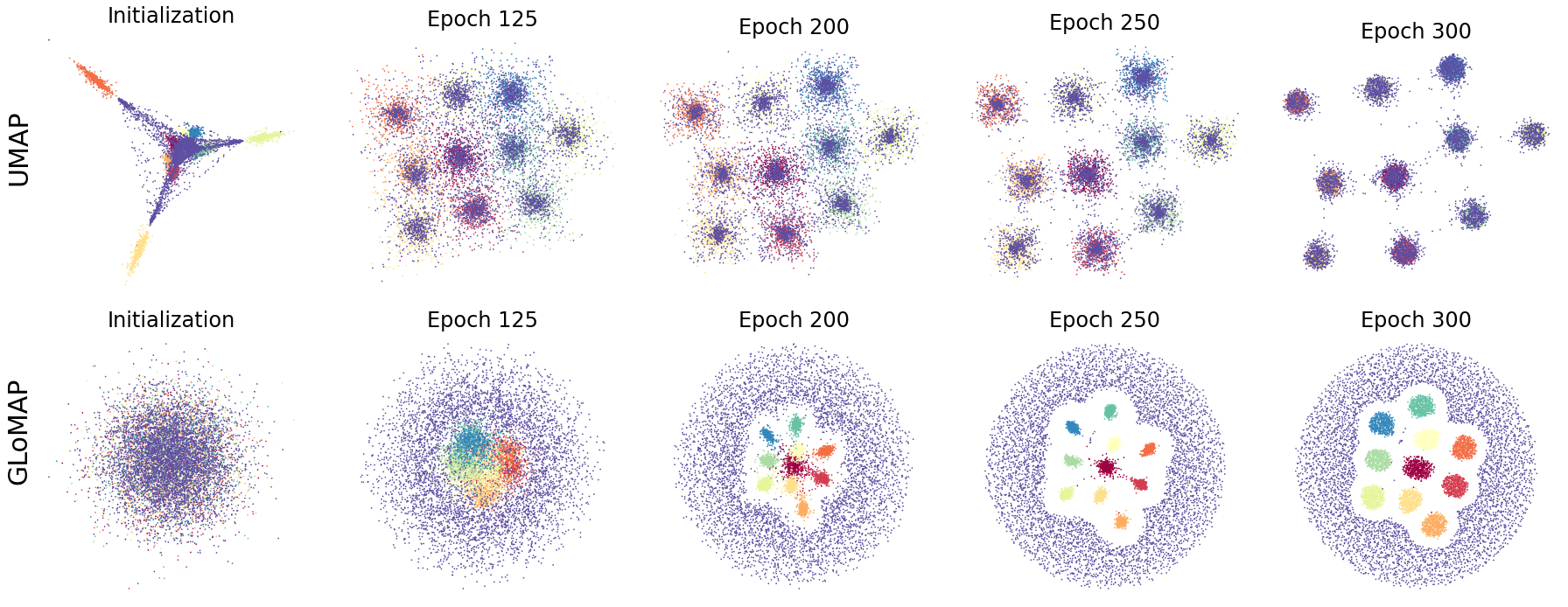
Nonlinear dimensional reduction with the manifold assumption, often called manifold learning, has proven its usefulness in a wide range of high-dimensional data analysis. The significant impact of t-SNE and UMAP has catalyzed intense research interest, seeking further innovations toward visualizing not only the local but also the global structure information of the data. Moreover, there have been consistent efforts toward generalizable dimensional reduction that handles unseen data. In this paper, we first propose GLoMAP, a novel manifold learning method for dimensional reduction and high-dimensional data visualization. GLoMAP preserves locally and globally meaningful distance estimates and displays a progression from global to local formation during the course of optimization. Furthermore, we extend GLoMAP to its inductive version, iGLoMAP, which utilizes a deep neural network to map data to its lower-dimensional representation. This allows iGLoMAP to provide lower-dimensional embeddings for unseen points without needing to re-train the algorithm. iGLoMAP is also well-suited for mini-batch learning, enabling large-scale, accelerated gradient calculations. We have successfully applied both GLoMAP and iGLoMAP to the simulated and real-data settings, with competitive experiments against the state-of-the-art methods.
Read more6/13/2024
📉
0
CBMAP: Clustering-based manifold approximation and projection for dimensionality reduction
Berat Dogan
Dimensionality reduction methods are employed to decrease data dimensionality, either to enhance machine learning performance or to facilitate data visualization in two or three-dimensional spaces. These methods typically fall into two categories: feature selection and feature transformation. Feature selection retains significant features, while feature transformation projects data into a lower-dimensional space, with linear and nonlinear methods. While nonlinear methods excel in preserving local structures and capturing nonlinear relationships, they may struggle with interpreting global structures and can be computationally intensive. Recent algorithms, such as the t-SNE, UMAP, TriMap, and PaCMAP prioritize preserving local structures, often at the expense of accurately representing global structures, leading to clusters being spread out more in lower-dimensional spaces. Moreover, these methods heavily rely on hyperparameters, making their results sensitive to parameter settings. To address these limitations, this study introduces a clustering-based approach, namely CBMAP (Clustering-Based Manifold Approximation and Projection), for dimensionality reduction. CBMAP aims to preserve both global and local structures, ensuring that clusters in lower-dimensional spaces closely resemble those in high-dimensional spaces. Experimental evaluations on benchmark datasets demonstrate CBMAP's efficacy, offering speed, scalability, and minimal reliance on hyperparameters. Importantly, CBMAP enables low-dimensional projection of test data, addressing a critical need in machine learning applications. CBMAP is made freely available at https://github.com/doganlab/cbmap and can be installed from the Python Package Directory (PyPI) software repository with the command pip install cbmap.
Read more4/30/2024

0
GNUMAP: A Parameter-Free Approach to Unsupervised Dimensionality Reduction via Graph Neural Networks
Jihee You, So Won Jeong, Claire Donnat
With the proliferation of Graph Neural Network (GNN) methods stemming from contrastive learning, unsupervised node representation learning for graph data is rapidly gaining traction across various fields, from biology to molecular dynamics, where it is often used as a dimensionality reduction tool. However, there remains a significant gap in understanding the quality of the low-dimensional node representations these methods produce, particularly beyond well-curated academic datasets. To address this gap, we propose here the first comprehensive benchmarking of various unsupervised node embedding techniques tailored for dimensionality reduction, encompassing a range of manifold learning tasks, along with various performance metrics. We emphasize the sensitivity of current methods to hyperparameter choices -- highlighting a fundamental issue as to their applicability in real-world settings where there is no established methodology for rigorous hyperparameter selection. Addressing this issue, we introduce GNUMAP, a robust and parameter-free method for unsupervised node representation learning that merges the traditional UMAP approach with the expressivity of the GNN framework. We show that GNUMAP consistently outperforms existing state-of-the-art GNN embedding methods in a variety of contexts, including synthetic geometric datasets, citation networks, and real-world biomedical data -- making it a simple but reliable dimensionality reduction tool.
Read more8/1/2024
📉
0
Interpretable Dimensionality Reduction by Feature Preserving Manifold Approximation and Projection
Yang Yang, Hongjian Sun, Jialei Gong, Di Yu
Nonlinear dimensionality reduction lacks interpretability due to the absence of source features in low-dimensional embedding space. We propose an interpretable method featMAP to preserve source features by tangent space embedding. The core of our proposal is to utilize local singular value decomposition (SVD) to approximate the tangent space which is embedded to low-dimensional space by maintaining the alignment. Based on the embedding tangent space, featMAP enables the interpretability by locally demonstrating the source features and feature importance. Furthermore, featMAP embeds the data points by anisotropic projection to preserve the local similarity and original density. We apply featMAP to interpreting digit classification, object detection and MNIST adversarial examples. FeatMAP uses source features to explicitly distinguish the digits and objects and to explain the misclassification of adversarial examples. We also compare featMAP with other state-of-the-art methods on local and global metrics.
Read more4/3/2024