Informed Reinforcement Learning for Situation-Aware Traffic Rule Exceptions
2402.04168
0
0
🏅
Abstract
Reinforcement Learning is a highly active research field with promising advancements. In the field of autonomous driving, however, often very simple scenarios are being examined. Common approaches use non-interpretable control commands as the action space and unstructured reward designs which lack structure. In this work, we introduce Informed Reinforcement Learning, where a structured rulebook is integrated as a knowledge source. We learn trajectories and asses them with a situation-aware reward design, leading to a dynamic reward which allows the agent to learn situations which require controlled traffic rule exceptions. Our method is applicable to arbitrary RL models. We successfully demonstrate high completion rates of complex scenarios with recent model-based agents.
Create account to get full access
Overview
- Reinforcement learning is a highly active research field with promising advancements, especially in the domain of autonomous driving.
- However, many existing approaches in autonomous driving focus on simple scenarios and use non-interpretable control commands as the action space, along with unstructured reward designs.
- This paper introduces "Informed Reinforcement Learning," where a structured rulebook is integrated as a knowledge source to learn trajectories and assess them with a situation-aware reward design.
- The method allows the agent to learn situations that require controlled traffic rule exceptions and is applicable to arbitrary reinforcement learning models.
Plain English Explanation
Reinforcement learning is a type of machine learning where an agent learns how to behave in an environment by trial and error, receiving rewards or punishments for its actions. This field has seen a lot of progress and has promising applications, like in autonomous driving.
However, in autonomous driving, many of the current approaches only look at simple scenarios and use very basic commands for the agent to control the vehicle. They also have reward systems that are not well-structured, which can make it hard for the agent to learn.
This paper introduces a new approach called "Informed Reinforcement Learning." The key idea is to give the agent more structure and information to work with. Specifically, they integrate a set of rules or a "rulebook" that the agent can use as a guide. This allows the agent to learn trajectories (paths) for the vehicle and assess them based on the situation, using a more dynamic reward system.
This dynamic reward system lets the agent learn when it's okay to make exceptions to the traffic rules, which can be important in complex driving scenarios. The method can be used with different reinforcement learning models, so it's quite flexible and applicable to a wide range of problems.
Technical Explanation
The paper introduces an "Informed Reinforcement Learning" approach for autonomous driving, where a structured rulebook is integrated as a knowledge source. This allows the agent to learn trajectories and assess them using a situation-aware reward design, which enables the agent to learn when controlled traffic rule exceptions are necessary.
The key elements of the approach include:
-
Structured Rulebook: Instead of using unstructured reward designs, the method incorporates a set of traffic rules and regulations as a structured knowledge source for the agent to reference.
-
Trajectory Learning: The agent learns to plan trajectories (paths) for the vehicle, rather than just outputting low-level control commands.
-
Situation-Aware Rewards: The rewards given to the agent are designed to be dynamic and sensitive to the specific driving situation, allowing the agent to learn when controlled rule exceptions are appropriate.
The authors demonstrate that their method, which is applicable to a range of reinforcement learning models, can achieve high completion rates on complex autonomous driving scenarios, outperforming simpler approaches that use unstructured rewards and non-interpretable control commands.
Critical Analysis
The paper presents a promising approach to improving the performance of reinforcement learning agents in autonomous driving scenarios. By integrating a structured rulebook and situation-aware rewards, the method allows the agent to learn more nuanced and context-dependent behaviors, going beyond simple rule-following.
However, the paper does not delve into the potential limitations or caveats of this approach. For example, it's unclear how the rulebook is constructed and how comprehensive it needs to be to handle a wide range of driving situations. Additionally, the authors do not discuss how the situation-aware reward design is developed and whether it can be generalized to other domains beyond autonomous driving.
Furthermore, the paper primarily focuses on the high-level description of the approach and its demonstrated performance, but lacks a deeper analysis of the underlying mechanisms and trade-offs involved. A more thorough exploration of the strengths, weaknesses, and areas for further research would help provide a more well-rounded understanding of the method.
Despite these limitations, the "Informed Reinforcement Learning" approach represents an interesting and potentially impactful contribution to the field of autonomous driving, as it aims to bridge the gap between rule-based and learning-based methods. Continued research in this direction could lead to more robust and interpretable reinforcement learning systems for complex real-world applications.
Conclusion
This paper introduces a novel "Informed Reinforcement Learning" approach for autonomous driving, where a structured rulebook is integrated as a knowledge source to guide the agent's learning process. By using situation-aware rewards, the method allows the agent to learn when controlled exceptions to traffic rules are necessary, leading to better performance on complex driving scenarios.
The key innovation of this work is the integration of structured domain knowledge (the rulebook) with the flexibility and adaptability of reinforcement learning. This approach has the potential to make reinforcement learning systems more interpretable and reliable, which is crucial for safety-critical applications like autonomous driving.
While the paper does not address all the potential limitations and areas for further research, it represents an important step forward in the field of autonomous driving and reinforcement learning. By combining rule-based and learning-based techniques, the "Informed Reinforcement Learning" method could pave the way for more advanced and trustworthy autonomous systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
In-context Learning for Automated Driving Scenarios
Ziqi Zhou, Jingyue Zhang, Jingyuan Zhang, Boyue Wang, Tianyu Shi, Alaa Khamis
0
0
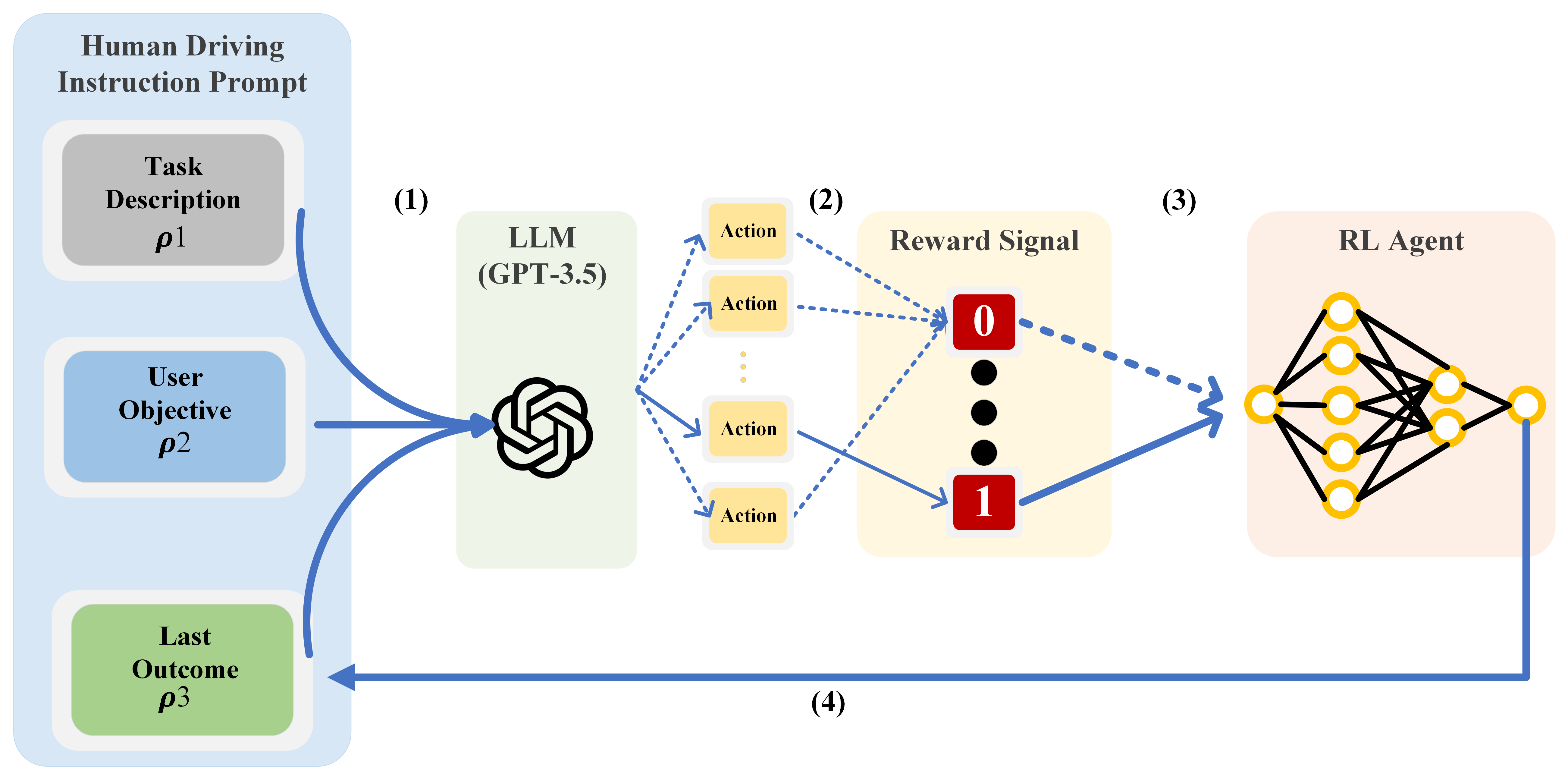
One of the key challenges in current Reinforcement Learning (RL)-based Automated Driving (AD) agents is achieving flexible, precise, and human-like behavior cost-effectively. This paper introduces an innovative approach utilizing Large Language Models (LLMs) to intuitively and effectively optimize RL reward functions in a human-centric way. We developed a framework where instructions and dynamic environment descriptions are input into the LLM. The LLM then utilizes this information to assist in generating rewards, thereby steering the behavior of RL agents towards patterns that more closely resemble human driving. The experimental results demonstrate that this approach not only makes RL agents more anthropomorphic but also reaches better performance. Additionally, various strategies for reward-proxy and reward-shaping are investigated, revealing the significant impact of prompt design on shaping an AD vehicle's behavior. These findings offer a promising direction for the development of more advanced and human-like automated driving systems. Our experimental data and source code can be found here.
5/8/2024
🏅
Provable Traffic Rule Compliance in Safe Reinforcement Learning on the Open Sea
Hanna Krasowski, Matthias Althoff
0
0
For safe operation, autonomous vehicles have to obey traffic rules that are set forth in legal documents formulated in natural language. Temporal logic is a suitable concept to formalize such traffic rules. Still, temporal logic rules often result in constraints that are hard to solve using optimization-based motion planners. Reinforcement learning (RL) is a promising method to find motion plans for autonomous vehicles. However, vanilla RL algorithms are based on random exploration and do not automatically comply with traffic rules. Our approach accomplishes guaranteed rule-compliance by integrating temporal logic specifications into RL. Specifically, we consider the application of vessels on the open sea, which must adhere to the Convention on the International Regulations for Preventing Collisions at Sea (COLREGS). To efficiently synthesize rule-compliant actions, we combine predicates based on set-based prediction with a statechart representing our formalized rules and their priorities. Action masking then restricts the RL agent to this set of verified rule-compliant actions. In numerical evaluations on critical maritime traffic situations, our agent always complies with the formalized legal rules and never collides while achieving a high goal-reaching rate during training and deployment. In contrast, vanilla and traffic rule-informed RL agents frequently violate traffic rules and collide even after training.
5/20/2024

Act Better by Timing: A timing-Aware Reinforcement Learning for Autonomous Driving
Guanzhou Li, Jianping Wu, Yujing He
0
0
Coping with intensively interactive scenarios is one of the significant challenges in the development of autonomous driving. Reinforcement learning (RL) offers an ideal solution for such scenarios through its self-evolution mechanism via interaction with the environment. However, the lack of sufficient safety mechanisms in common RL leads to the fact that agent often find it difficult to interact well in highly dynamic environment and may collide in pursuit of short-term rewards. Much of the existing safe RL methods require environment modeling to generate reliable safety boundaries that constrain agent behavior. Nevertheless, acquiring such safety boundaries is not always feasible in dynamic environments. Inspired by the driver's behavior of acting when uncertainty is minimal, this study introduces the concept of action timing to replace explicit safety boundary modeling. We define actor as an agent to decide optimal action at each step. By imaging the actor take opportunity to act as a timing-dependent gradual process, the other agent called timing taker can evaluate the optimal action execution time, and relate the optimal timing to each action moment as a dynamic safety factor to constrain the actor's action. In the experiment involving a complex, unsignaled intersection interaction, this framework achieved superior safety performance compared to all benchmark models.
6/21/2024
Autonomous vehicle decision and control through reinforcement learning with traffic flow randomization
Yuan Lin, Antai Xie, Xiao Liu
0
0
Most of the current studies on autonomous vehicle decision-making and control tasks based on reinforcement learning are conducted in simulated environments. The training and testing of these studies are carried out under rule-based microscopic traffic flow, with little consideration of migrating them to real or near-real environments to test their performance. It may lead to a degradation in performance when the trained model is tested in more realistic traffic scenes. In this study, we propose a method to randomize the driving style and behavior of surrounding vehicles by randomizing certain parameters of the car-following model and the lane-changing model of rule-based microscopic traffic flow in SUMO. We trained policies with deep reinforcement learning algorithms under the domain randomized rule-based microscopic traffic flow in freeway and merging scenes, and then tested them separately in rule-based microscopic traffic flow and high-fidelity microscopic traffic flow. Results indicate that the policy trained under domain randomization traffic flow has significantly better success rate and calculative reward compared to the models trained under other microscopic traffic flows.
4/22/2024