Predicting Future Spatiotemporal Occupancy Grids with Semantics for Autonomous Driving
2310.01723
0
0
🤯
Abstract
For autonomous vehicles to proactively plan safe trajectories and make informed decisions, they must be able to predict the future occupancy states of the local environment. However, common issues with occupancy prediction include predictions where moving objects vanish or become blurred, particularly at longer time horizons. We propose an environment prediction framework that incorporates environment semantics for future occupancy prediction. Our method first semantically segments the environment and uses this information along with the occupancy information to predict the spatiotemporal evolution of the environment. We validate our approach on the real-world Waymo Open Dataset. Compared to baseline methods, our model has higher prediction accuracy and is capable of maintaining moving object appearances in the predictions for longer prediction time horizons.
Create account to get full access
Overview
- Autonomous vehicles need to predict the future occupancy states of their local environment to plan safe trajectories and make informed decisions.
- Common issues with occupancy prediction include moving objects vanishing or becoming blurred, especially for longer time horizons.
- The proposed framework incorporates environment semantics to improve future occupancy prediction.
Plain English Explanation
Autonomous vehicles, like self-driving cars, need to be able to predict what's going to happen in their surroundings so they can plan their movements safely. This is especially important for things like pedestrians, other vehicles, and obstacles that are moving around. However, current methods for predicting this future occupancy [https://aimodels.fyi/papers/arxiv/quad-query-based-interpretable-neural-motion-planning] often have problems where moving objects seem to disappear or get fuzzy, particularly when trying to predict further into the future.
The new approach described in this paper tries to fix this by using information about the meaning or "semantics" of the environment, in addition to the occupancy data. For example, it can recognize that an area is a road, a sidewalk, a building, etc. and use that context to make better predictions about how things will move and change over time [https://aimodels.fyi/papers/arxiv/unified-spatio-temporal-tri-perspective-view-representation, https://aimodels.fyi/papers/arxiv/fully-sparse-3d-occupancy-prediction, https://aimodels.fyi/papers/arxiv/co-occ-coupling-explicit-feature-fusion-volume]. This helps the system maintain a clearer picture of moving objects as it predicts further into the future.
Technical Explanation
The proposed framework first semantically segments the environment, identifying things like roads, sidewalks, and buildings. It then uses this semantic information along with occupancy data to predict how the environment will change over time. The key innovation is leveraging the semantics to improve the long-term predictions of moving objects.
The researchers validated their approach using the real-world Waymo Open Dataset. Compared to baseline methods that only use occupancy data, their model achieved higher prediction accuracy and was better able to maintain the appearance of moving objects in the long-term predictions [https://aimodels.fyi/papers/arxiv/towards-effective-next-poi-prediction-spatial-semantic].
Critical Analysis
The paper provides a thoughtful approach to address the common challenge of occupancy prediction, particularly for longer time horizons. Incorporating semantic information about the environment is a logical step to leverage more contextual cues and improve the model's understanding of how dynamic elements are likely to evolve.
That said, the experiments were limited to the Waymo dataset, so further validation on other real-world datasets would help demonstrate the generalizability of the approach. Additionally, the paper does not deeply explore the potential limitations or failure cases of the semantic-enhanced prediction, such as how it might handle unexpected or anomalous events in the environment.
Continued research in this direction could explore ways to further strengthen the coupling between semantic understanding and spatiotemporal prediction, perhaps through more sophisticated neural architectures or multi-task learning approaches. Integrating this type of environment prediction capability into autonomous vehicle planning and decision-making systems remains an important area for ongoing development and innovation.
Conclusion
This paper presents a novel framework for improving future occupancy prediction in autonomous vehicle applications by incorporating semantic understanding of the environment. The results demonstrate the value of leveraging rich contextual cues to maintain better tracking of dynamic objects, even at longer time horizons. As autonomous vehicles continue to advance, approaches like this that enhance the system's spatial and temporal reasoning will be crucial for enabling safe and reliable navigation in complex real-world scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Real-time 3D semantic occupancy prediction for autonomous vehicles using memory-efficient sparse convolution
Samuel Sze, Lars Kunze
0
0
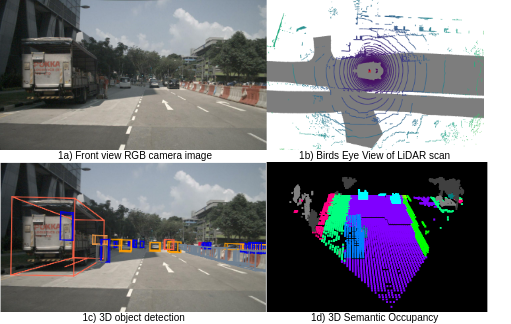
In autonomous vehicles, understanding the surrounding 3D environment of the ego vehicle in real-time is essential. A compact way to represent scenes while encoding geometric distances and semantic object information is via 3D semantic occupancy maps. State of the art 3D mapping methods leverage transformers with cross-attention mechanisms to elevate 2D vision-centric camera features into the 3D domain. However, these methods encounter significant challenges in real-time applications due to their high computational demands during inference. This limitation is particularly problematic in autonomous vehicles, where GPU resources must be shared with other tasks such as localization and planning. In this paper, we introduce an approach that extracts features from front-view 2D camera images and LiDAR scans, then employs a sparse convolution network (Minkowski Engine), for 3D semantic occupancy prediction. Given that outdoor scenes in autonomous driving scenarios are inherently sparse, the utilization of sparse convolution is particularly apt. By jointly solving the problems of 3D scene completion of sparse scenes and 3D semantic segmentation, we provide a more efficient learning framework suitable for real-time applications in autonomous vehicles. We also demonstrate competitive accuracy on the nuScenes dataset.
5/21/2024

UnO: Unsupervised Occupancy Fields for Perception and Forecasting
Ben Agro, Quinlan Sykora, Sergio Casas, Thomas Gilles, Raquel Urtasun
0
0
Perceiving the world and forecasting its future state is a critical task for self-driving. Supervised approaches leverage annotated object labels to learn a model of the world -- traditionally with object detections and trajectory predictions, or temporal bird's-eye-view (BEV) occupancy fields. However, these annotations are expensive and typically limited to a set of predefined categories that do not cover everything we might encounter on the road. Instead, we learn to perceive and forecast a continuous 4D (spatio-temporal) occupancy field with self-supervision from LiDAR data. This unsupervised world model can be easily and effectively transferred to downstream tasks. We tackle point cloud forecasting by adding a lightweight learned renderer and achieve state-of-the-art performance in Argoverse 2, nuScenes, and KITTI. To further showcase its transferability, we fine-tune our model for BEV semantic occupancy forecasting and show that it outperforms the fully supervised state-of-the-art, especially when labeled data is scarce. Finally, when compared to prior state-of-the-art on spatio-temporal geometric occupancy prediction, our 4D world model achieves a much higher recall of objects from classes relevant to self-driving.
6/14/2024

Vision-based 3D occupancy prediction in autonomous driving: a review and outlook
Yanan Zhang, Jinqing Zhang, Zengran Wang, Junhao Xu, Di Huang
0
0
In recent years, autonomous driving has garnered escalating attention for its potential to relieve drivers' burdens and improve driving safety. Vision-based 3D occupancy prediction, which predicts the spatial occupancy status and semantics of 3D voxel grids around the autonomous vehicle from image inputs, is an emerging perception task suitable for cost-effective perception system of autonomous driving. Although numerous studies have demonstrated the greater advantages of 3D occupancy prediction over object-centric perception tasks, there is still a lack of a dedicated review focusing on this rapidly developing field. In this paper, we first introduce the background of vision-based 3D occupancy prediction and discuss the challenges in this task. Secondly, we conduct a comprehensive survey of the progress in vision-based 3D occupancy prediction from three aspects: feature enhancement, deployment friendliness and label efficiency, and provide an in-depth analysis of the potentials and challenges of each category of methods. Finally, we present a summary of prevailing research trends and propose some inspiring future outlooks. To provide a valuable reference for researchers, a regularly updated collection of related papers, datasets, and codes is organized at https://github.com/zya3d/Awesome-3D-Occupancy-Prediction.
5/7/2024
🔮
Collaborative Semantic Occupancy Prediction with Hybrid Feature Fusion in Connected Automated Vehicles
Rui Song, Chenwei Liang, Hu Cao, Zhiran Yan, Walter Zimmer, Markus Gross, Andreas Festag, Alois Knoll
0
0
Collaborative perception in automated vehicles leverages the exchange of information between agents, aiming to elevate perception results. Previous camera-based collaborative 3D perception methods typically employ 3D bounding boxes or bird's eye views as representations of the environment. However, these approaches fall short in offering a comprehensive 3D environmental prediction. To bridge this gap, we introduce the first method for collaborative 3D semantic occupancy prediction. Particularly, it improves local 3D semantic occupancy predictions by hybrid fusion of (i) semantic and occupancy task features, and (ii) compressed orthogonal attention features shared between vehicles. Additionally, due to the lack of a collaborative perception dataset designed for semantic occupancy prediction, we augment a current collaborative perception dataset to include 3D collaborative semantic occupancy labels for a more robust evaluation. The experimental findings highlight that: (i) our collaborative semantic occupancy predictions excel above the results from single vehicles by over 30%, and (ii) models anchored on semantic occupancy outpace state-of-the-art collaborative 3D detection techniques in subsequent perception applications, showcasing enhanced accuracy and enriched semantic-awareness in road environments.
4/26/2024