An Introduction to Centralized Training for Decentralized Execution in Cooperative Multi-Agent Reinforcement Learning

0
Sign in to get full access
Overview
- Introduces centralized training for decentralized execution in cooperative multi-agent reinforcement learning (MARL)
- Explores how to train a single centralized policy that can be executed in a decentralized manner by multiple agents
- Discusses the challenges and benefits of this approach compared to fully decentralized MARL
Plain English Explanation
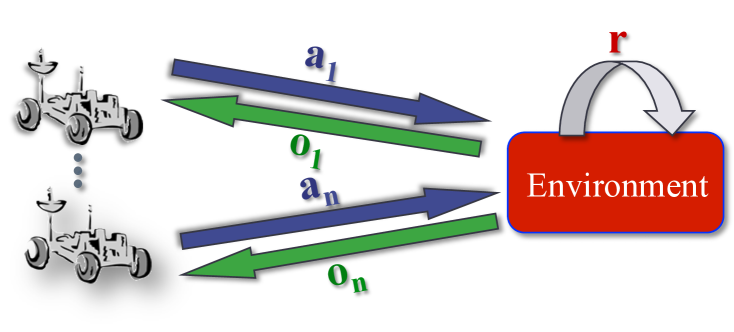
In cooperative multi-agent reinforcement learning, a group of AI agents work together to achieve a common goal. However, this can be challenging because each agent only has partial information about the environment and must make decisions independently.
The paper proposes a new approach called "centralized training for decentralized execution." The key idea is to train a single, centralized policy that can then be used by multiple agents in a decentralized way. This allows the agents to leverage the full information available during training, while still maintaining the flexibility and scalability of decentralized execution.
The authors explain that this approach can offer several benefits, such as improved performance, faster convergence, and better exploration of the state space. However, it also introduces new challenges, such as ensuring the centralized policy can be effectively decomposed and distributed to the individual agents.
Technical Explanation
The paper frames the cooperative MARL problem as a decentralized partially observable Markov decision process (Dec-POMDP). In this formulation, each agent has a limited view of the overall state of the environment and must make decisions based on its own observations.
The authors then introduce the concept of "centralized training for decentralized execution," where a single, centralized policy is learned during training, but can then be executed in a decentralized manner by the individual agents. This is achieved by training the centralized policy to output a set of individual agent actions, rather than a single joint action.
The paper discusses several key challenges in implementing this approach, such as:
- Ensuring Coordination: The centralized policy must learn to coordinate the agents' actions, even though they are executed independently.
- Scalability: The centralized policy must be able to handle a large number of agents without becoming prohibitively complex.
- Partial Observability: The agents must be able to infer the necessary information to execute the centralized policy based on their limited observations.
The authors explore various techniques to address these challenges, such as the use of attention mechanisms and decomposition methods. They also present experimental results demonstrating the potential benefits of their approach compared to fully decentralized MARL.
Critical Analysis
The paper provides a promising approach to cooperative MARL, but it also acknowledges several limitations and areas for future research:
- Scalability: While the centralized training approach may offer benefits for smaller-scale problems, the authors note that the scalability of this approach to larger environments with many agents is an open challenge.
- Partial Observability: The authors suggest that further research is needed to better understand how the centralized policy can be effectively decomposed and distributed to agents with limited observations.
- Interpretability: The centralized policy may be complex and difficult to interpret, which could make it challenging to understand and debug the system's behavior.
Additionally, one could question whether the benefits of centralized training truly outweigh the potential drawbacks of reduced flexibility and adaptability compared to fully decentralized MARL approaches. Further empirical evaluation and real-world testing would be necessary to fully assess the practical implications of this approach.
Conclusion
This paper introduces a novel approach to cooperative MARL, where a single, centralized policy is trained but can then be executed in a decentralized manner by multiple agents. The authors argue that this can offer several benefits, such as improved performance and faster convergence, while still maintaining the flexibility and scalability of decentralized execution.
However, the paper also highlights several key challenges that must be addressed, such as ensuring coordination, scalability, and effective decomposition of the centralized policy. Further research is needed to fully understand the strengths and limitations of this approach and its potential impact on the field of cooperative MARL.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
An Introduction to Centralized Training for Decentralized Execution in Cooperative Multi-Agent Reinforcement Learning
Christopher Amato
Multi-agent reinforcement learning (MARL) has exploded in popularity in recent years. Many approaches have been developed but they can be divided into three main types: centralized training and execution (CTE), centralized training for decentralized execution (CTDE), and Decentralized training and execution (DTE). CTDE methods are the most common as they can use centralized information during training but execute in a decentralized manner -- using only information available to that agent during execution. CTDE is the only paradigm that requires a separate training phase where any available information (e.g., other agent policies, underlying states) can be used. As a result, they can be more scalable than CTE methods, do not require communication during execution, and can often perform well. CTDE fits most naturally with the cooperative case, but can be potentially applied in competitive or mixed settings depending on what information is assumed to be observed. This text is an introduction to CTDE in cooperative MARL. It is meant to explain the setting, basic concepts, and common methods. It does not cover all work in CTDE MARL as the subarea is quite extensive. I have included work that I believe is important for understanding the main concepts in the subarea and apologize to those that I have omitted.
Read more9/6/2024
🏅
0
(A Partial Survey of) Decentralized, Cooperative Multi-Agent Reinforcement Learning
Christopher Amato
Multi-agent reinforcement learning (MARL) has exploded in popularity in recent years. Many approaches have been developed but they can be divided into three main types: centralized training and execution (CTE), centralized training for decentralized execution (CTDE), and Decentralized training and execution (DTE). Decentralized training and execution methods make the fewest assumptions and are often simple to implement. In fact, as I'll discuss, any single-agent RL method can be used for DTE by just letting each agent learn separately. Of course, there are pros and cons to such approaches. It is worth noting that DTE is required if no offline coordination is available. That is, if all agents must learn during online interactions without prior coordination, learning and execution must both be decentralized. DTE methods can be applied in cooperative, competitive, or mixed cases but this text will focus on the cooperative MARL case. This text is an introduction to the field of decentralized, cooperative MARL. As such, I will first give a brief description of the cooperative MARL problem in the form of the Dec-POMDP. Then, I will discuss value-based DTE methods starting with independent Q-learning and its extensions and then discuss the extension to the deep case with DQN, the additional complications this causes, and methods that have been developed to (attempt to) address these issues. Next, I will discuss policy gradient DTE methods starting with independent REINFORCE (i.e., vanilla policy gradient), and then extending to the actor-critic case and deep variants (such as independent PPO). Finally, I will discuss some general topics related to DTE and future directions.
Read more8/21/2024

0
Hierarchical Consensus-Based Multi-Agent Reinforcement Learning for Multi-Robot Cooperation Tasks
Pu Feng, Junkang Liang, Size Wang, Xin Yu, Xin Ji, Yiting Chen, Kui Zhang, Rongye Shi, Wenjun Wu
In multi-agent reinforcement learning (MARL), the Centralized Training with Decentralized Execution (CTDE) framework is pivotal but struggles due to a gap: global state guidance in training versus reliance on local observations in execution, lacking global signals. Inspired by human societal consensus mechanisms, we introduce the Hierarchical Consensus-based Multi-Agent Reinforcement Learning (HC-MARL) framework to address this limitation. HC-MARL employs contrastive learning to foster a global consensus among agents, enabling cooperative behavior without direct communication. This approach enables agents to form a global consensus from local observations, using it as an additional piece of information to guide collaborative actions during execution. To cater to the dynamic requirements of various tasks, consensus is divided into multiple layers, encompassing both short-term and long-term considerations. Short-term observations prompt the creation of an immediate, low-layer consensus, while long-term observations contribute to the formation of a strategic, high-layer consensus. This process is further refined through an adaptive attention mechanism that dynamically adjusts the influence of each consensus layer. This mechanism optimizes the balance between immediate reactions and strategic planning, tailoring it to the specific demands of the task at hand. Extensive experiments and real-world applications in multi-robot systems showcase our framework's superior performance, marking significant advancements over baselines.
Read more8/26/2024
🏋️
0
PTDE: Personalized Training with Distilled Execution for Multi-Agent Reinforcement Learning
Yiqun Chen, Hangyu Mao, Jiaxin Mao, Shiguang Wu, Tianle Zhang, Bin Zhang, Wei Yang, Hongxing Chang
Centralized Training with Decentralized Execution (CTDE) has emerged as a widely adopted paradigm in multi-agent reinforcement learning, emphasizing the utilization of global information for learning an enhanced joint $Q$-function or centralized critic. In contrast, our investigation delves into harnessing global information to directly enhance individual $Q$-functions or individual actors. Notably, we discover that applying identical global information universally across all agents proves insufficient for optimal performance. Consequently, we advocate for the customization of global information tailored to each agent, creating agent-personalized global information to bolster overall performance. Furthermore, we introduce a novel paradigm named Personalized Training with Distilled Execution (PTDE), wherein agent-personalized global information is distilled into the agent's local information. This distilled information is then utilized during decentralized execution, resulting in minimal performance degradation. PTDE can be seamlessly integrated with state-of-the-art algorithms, leading to notable performance enhancements across diverse benchmarks, including the SMAC benchmark, Google Research Football (GRF) benchmark, and Learning to Rank (LTR) task.
Read more4/23/2024