An Investigation on The Position Encoding in Vision-Based Dynamics Prediction

0

Sign in to get full access
Overview
- Investigates the impact of position encoding on vision-based dynamics prediction
- Examines different position encoding strategies and their effects on model performance
- Aims to understand the role of spatial information in predicting future states from visual inputs
Plain English Explanation
The paper explores how the way a model represents the spatial location or "position" of objects in an image can affect its ability to predict future dynamics or movements. When training a model to predict how objects will move or change over time based on visual inputs, the way the model encodes the positions of those objects is an important factor.
The researchers tested different position encoding strategies to see how they impacted the model's performance at forecasting future states. They wanted to understand the role that spatial information plays in this type of dynamics prediction task.
Technical Explanation
The paper investigates the influence of position encoding on vision-based dynamics prediction models. The authors evaluate several position encoding strategies, including:
- Implicit Encoding: The model learns to extract spatial information implicitly from the visual inputs, without any explicit encoding.
- Explicit Encoding: The model is provided with explicit spatial coordinates or bounding box information for the objects in the input.
- Hybrid Encoding: The model uses a combination of implicit and explicit encoding.
The researchers compare the performance of these different position encoding approaches on dynamics prediction tasks. They analyze the models' ability to forecast future states, such as object trajectories or motion patterns, given visual inputs.
The results provide insights into the importance of spatial information in vision-based dynamics prediction. The paper discusses the trade-offs between the various encoding strategies and the implications for model design and performance.
Critical Analysis
The paper offers a thoughtful investigation into a key component of vision-based dynamics prediction models. The authors acknowledge the potential limitations of their study, such as the use of specific datasets and model architectures.
One area for further research could be exploring the generalization of these findings across a wider range of dynamics prediction tasks and datasets. Additionally, the paper does not delve into the interpretability or explainability of the different position encoding strategies, which could be an interesting avenue for future work.
Overall, the paper provides valuable insights into the role of spatial information in dynamics prediction and highlights the importance of carefully considering position encoding when designing these types of predictive models.
Conclusion
This paper investigates the impact of position encoding on vision-based dynamics prediction models. The researchers evaluate different encoding strategies, including implicit, explicit, and hybrid approaches, to understand the influence of spatial information on the models' ability to forecast future states.
The findings offer insights into the crucial role of position encoding in this type of predictive task. The paper provides a solid foundation for further research on the design and optimization of dynamics prediction models, particularly in the context of leveraging spatial cues to improve performance.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
An Investigation on The Position Encoding in Vision-Based Dynamics Prediction
Jiageng Zhu, Hanchen Xie, Jiazhi Li, Mahyar Khayatkhoei, Wael AbdAlmageed
Despite the success of vision-based dynamics prediction models, which predict object states by utilizing RGB images and simple object descriptions, they were challenged by environment misalignments. Although the literature has demonstrated that unifying visual domains with both environment context and object abstract, such as semantic segmentation and bounding boxes, can effectively mitigate the visual domain misalignment challenge, discussions were focused on the abstract of environment context, and the insight of using bounding box as the object abstract is under-explored. Furthermore, we notice that, as empirical results shown in the literature, even when the visual appearance of objects is removed, object bounding boxes alone, instead of being directly fed into the network, can indirectly provide sufficient position information via the Region of Interest Pooling operation for dynamics prediction. However, previous literature overlooked discussions regarding how such position information is implicitly encoded in the dynamics prediction model. Thus, in this paper, we provide detailed studies to investigate the process and necessary conditions for encoding position information via using the bounding box as the object abstract into output features. Furthermore, we study the limitation of solely using object abstracts, such that the dynamics prediction performance will be jeopardized when the environment context varies.
Read more8/28/2024
0
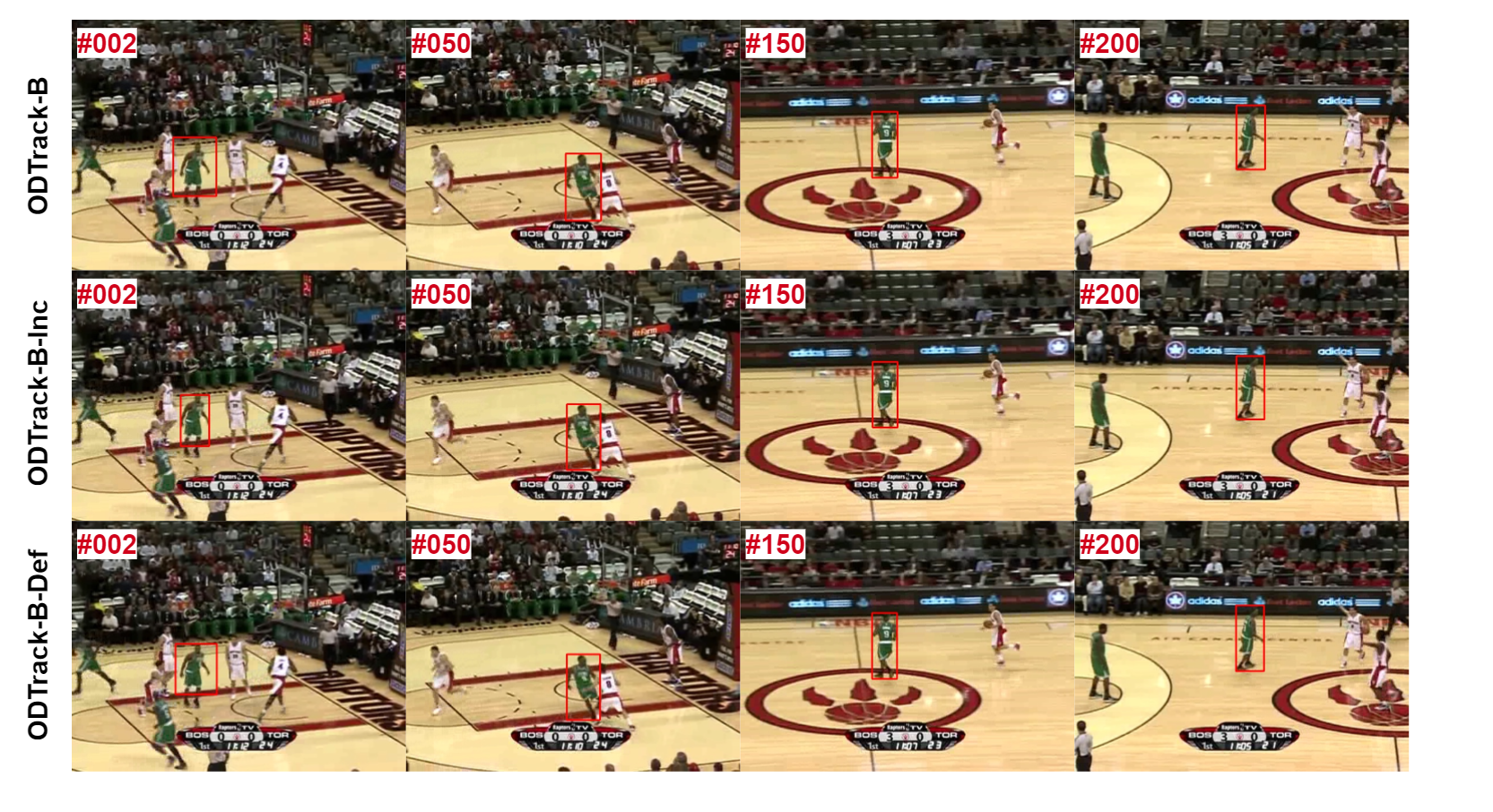
A Novel Bounding Box Regression Method for Single Object Tracking
Omar Abdelaziz, Mohamed Sami Shehata
Locating an object in a sequence of frames, given its appearance in the first frame of the sequence, is a hard problem that involves many stages. Usually, state-of-the-art methods focus on bringing novel ideas in the visual encoding or relational modelling phases. However, in this work, we show that bounding box regression from learned joint search and template features is of high importance as well. While previous methods relied heavily on well-learned features representing interactions between search and template, we hypothesize that the receptive field of the input convolutional bounding box network plays an important role in accurately determining the object location. To this end, we introduce two novel bounding box regression networks: inception and deformable. Experiments and ablation studies show that our inception module installed on the recent ODTrack outperforms the latter on three benchmarks: the GOT-10k, the UAV123 and the OTB2015.
Read more5/20/2024
🤷
0
Unsupervised Dynamics Prediction with Object-Centric Kinematics
Yeon-Ji Song, Suhyung Choi, Jaein Kim, Jin-Hwa Kim, Byoung-Tak Zhang
Human perception involves discerning complex multi-object scenes into time-static object appearance (ie, size, shape, color) and time-varying object motion (ie, location, velocity, acceleration). This innate ability to unconsciously understand the environment is the motivation behind the success of dynamics modeling. Object-centric representations have emerged as a promising tool for dynamics prediction, yet they primarily focus on the objects' appearance, often overlooking other crucial attributes. In this paper, we propose Object-Centric Kinematics (OCK), a framework for dynamics prediction leveraging object-centric representations. Our model utilizes a novel component named object kinematics, which comprises low-level structured states of objects' position, velocity, and acceleration. The object kinematics are obtained via either implicit or explicit approaches, enabling comprehensive spatiotemporal object reasoning, and integrated through various transformer mechanisms, facilitating effective object-centric dynamics modeling. Our model demonstrates superior performance when handling objects and backgrounds in complex scenes characterized by a wide range of object attributes and dynamic movements. Moreover, our model demonstrates generalization capabilities across diverse synthetic environments, highlighting its potential for broad applicability in vision-related tasks.
Read more5/7/2024

0
HOIMotion: Forecasting Human Motion During Human-Object Interactions Using Egocentric 3D Object Bounding Boxes
Zhiming Hu, Zheming Yin, Daniel Haeufle, Syn Schmitt, Andreas Bulling
We present HOIMotion - a novel approach for human motion forecasting during human-object interactions that integrates information about past body poses and egocentric 3D object bounding boxes. Human motion forecasting is important in many augmented reality applications but most existing methods have only used past body poses to predict future motion. HOIMotion first uses an encoder-residual graph convolutional network (GCN) and multi-layer perceptrons to extract features from body poses and egocentric 3D object bounding boxes, respectively. Our method then fuses pose and object features into a novel pose-object graph and uses a residual-decoder GCN to forecast future body motion. We extensively evaluate our method on the Aria digital twin (ADT) and MoGaze datasets and show that HOIMotion consistently outperforms state-of-the-art methods by a large margin of up to 8.7% on ADT and 7.2% on MoGaze in terms of mean per joint position error. Complementing these evaluations, we report a human study (N=20) that shows that the improvements achieved by our method result in forecasted poses being perceived as both more precise and more realistic than those of existing methods. Taken together, these results reveal the significant information content available in egocentric 3D object bounding boxes for human motion forecasting and the effectiveness of our method in exploiting this information.
Read more7/4/2024