IOVS4NeRF:Incremental Optimal View Selection for Large-Scale NeRFs

0

Sign in to get full access
Overview
- The paper presents IOVS4NeRF, a method for incremental optimal view selection for large-scale neural radiance fields (NeRFs).
- NeRFs are a powerful technique for 3D scene reconstruction, but require capturing many images from different viewpoints, which can be time-consuming and impractical for large-scale scenes.
- IOVS4NeRF aims to efficiently select the most informative views to optimize NeRF reconstruction, reducing the number of required images.
Plain English Explanation
NeRF Director: Revisiting View Selection for Neural Radiance Fields is a powerful technique for creating realistic 3D models of scenes from photographs. However, to get good results, you typically need to take a lot of pictures from many different angles, which can be time-consuming and impractical, especially for large outdoor environments.
IOVS4NeRF is a new method that tries to solve this problem by automatically selecting the most important views to capture. It does this by analyzing the uncertainty in the NeRF reconstruction and choosing the views that will provide the most valuable information to improve the model. This allows you to get high-quality 3D models while capturing fewer images.
The key idea is to incrementally select views that reduce the overall uncertainty in the NeRF reconstruction the most. This is done by evaluating a set of candidate views and choosing the one that would provide the greatest reduction in uncertainty if added to the existing set of images. By iterating this process, IOVS4NeRF can efficiently build up a optimal set of views to reconstruct the scene.
Technical Explanation
IOVS4NeRF: Incremental Optimal View Selection for Large-Scale NeRFs presents a method for intelligently selecting the most informative camera views to efficiently capture data for constructing large-scale neural radiance fields (NeRFs).
The core of the approach is an incremental optimization process that selects the next best view to add to the existing set of images. This is done by estimating the uncertainty in the current NeRF reconstruction and evaluating how much each candidate view would reduce that uncertainty if added. The view that provides the greatest reduction in uncertainty is then selected and incorporated into the NeRF training.
The authors propose several techniques to enable this efficient view selection, including:
- A differentiable rendering pipeline to quickly evaluate the impact of candidate views
- A recurrent neural network that predicts the uncertainty in the current NeRF reconstruction
- A novel acquisition function that balances exploration and exploitation to find the optimal set of views
Experiments on large-scale outdoor scenes demonstrate that IOVS4NeRF can reconstruct high-quality NeRFs while capturing significantly fewer images compared to traditional uniform view sampling. This makes NeRF-based 3D modeling much more practical for real-world applications.
Critical Analysis
The IOVS4NeRF paper presents an intriguing approach to address the challenge of efficiently capturing the data required for large-scale NeRF reconstruction. By intelligently selecting the most informative camera views, the method can reduce the burden of manual data collection while maintaining high-quality 3D models.
One limitation noted in the paper is that the view selection process assumes the camera poses are known a priori. In many real-world scenarios, the camera poses may need to be estimated alongside the NeRF reconstruction, which could introduce additional complexity and sources of error. The authors acknowledge this as an area for future work.
Additionally, the paper focuses on outdoor scenes, where the lighting and scene structure may exhibit different characteristics compared to indoor environments. It would be valuable to see how well IOVS4NeRF generalizes to a wider range of settings, including more complex indoor scenes.
Another potential concern is the computational overhead of the view selection process, which involves differentiable rendering and a recurrent neural network for uncertainty prediction. While the authors report significant reductions in the number of required views, the additional computational costs may limit the practical deployment of IOVS4NeRF in some scenarios.
Overall, the IOVS4NeRF method represents an important step forward in making NeRF-based 3D reconstruction more efficient and accessible for large-scale applications. Further research into the generalization and optimization of the approach could lead to even more impactful advancements in this field.
Conclusion
The IOVS4NeRF paper presents a novel approach for efficiently capturing data for constructing large-scale neural radiance fields (NeRFs). By intelligently selecting the most informative camera views based on estimated uncertainty, the method can significantly reduce the number of images required while maintaining high-quality 3D reconstruction.
This work has the potential to make NeRF-based 3D modeling more practical and accessible for real-world applications, such as NVINS: Robust Visual-Inertial Navigation Fused with NeRF and Depth-Supervised Neural Surface Reconstruction from Airborne LiDAR. By streamlining the data capture process, IOVS4NeRF could enable the creation of more detailed and accurate 3D models of large-scale environments.
As the field of NeRF-based 3D reconstruction continues to evolve, techniques like IOVS4NeRF will play an important role in making these powerful tools more practical and accessible for a wide range of applications, from urban planning to digital twinning and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
IOVS4NeRF:Incremental Optimal View Selection for Large-Scale NeRFs
Jingpeng Xie, Shiyu Tan, Yuanlei Wang, Yizhen Lao
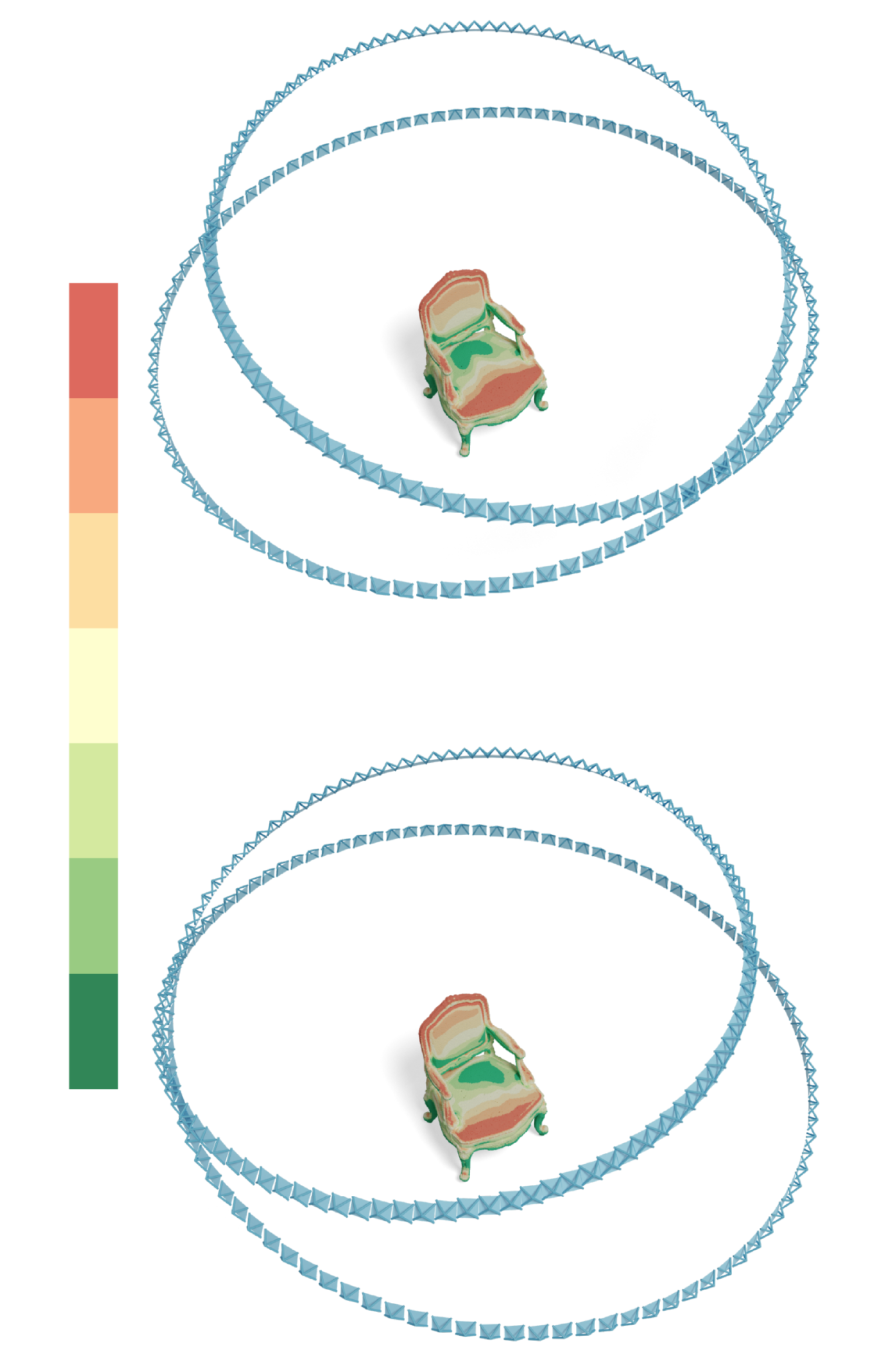
Neural Radiance Fields (NeRF) have recently demonstrated significant efficiency in the reconstruction of three-dimensional scenes and the synthesis of novel perspectives from a limited set of two-dimensional images. However, large-scale reconstruction using NeRF requires a substantial amount of aerial imagery for training, making it impractical in resource-constrained environments. This paper introduces an innovative incremental optimal view selection framework, IOVS4NeRF, designed to model a 3D scene within a restricted input budget. Specifically, our approach involves adding the existing training set with newly acquired samples, guided by a computed novel hybrid uncertainty of candidate views, which integrates rendering uncertainty and positional uncertainty. By selecting views that offer the highest information gain, the quality of novel view synthesis can be enhanced with minimal additional resources. Comprehensive experiments substantiate the efficiency of our model in realistic scenes, outperforming baselines and similar prior works, particularly under conditions of sparse training data.
Read more9/10/2024
0
NeRF Director: Revisiting View Selection in Neural Volume Rendering
Wenhui Xiao, Rodrigo Santa Cruz, David Ahmedt-Aristizabal, Olivier Salvado, Clinton Fookes, Leo Lebrat
Neural Rendering representations have significantly contributed to the field of 3D computer vision. Given their potential, considerable efforts have been invested to improve their performance. Nonetheless, the essential question of selecting training views is yet to be thoroughly investigated. This key aspect plays a vital role in achieving high-quality results and aligns with the well-known tenet of deep learning: garbage in, garbage out. In this paper, we first illustrate the importance of view selection by demonstrating how a simple rotation of the test views within the most pervasive NeRF dataset can lead to consequential shifts in the performance rankings of state-of-the-art techniques. To address this challenge, we introduce a unified framework for view selection methods and devise a thorough benchmark to assess its impact. Significant improvements can be achieved without leveraging error or uncertainty estimation but focusing on uniform view coverage of the reconstructed object, resulting in a training-free approach. Using this technique, we show that high-quality renderings can be achieved faster by using fewer views. We conduct extensive experiments on both synthetic datasets and realistic data to demonstrate the effectiveness of our proposed method compared with random, conventional error-based, and uncertainty-guided view selection.
Read more6/14/2024

0
NeRF2Points: Large-Scale Point Cloud Generation From Street Views' Radiance Field Optimization
Peng Tu, Xun Zhou, Mingming Wang, Xiaojun Yang, Bo Peng, Ping Chen, Xiu Su, Yawen Huang, Yefeng Zheng, Chang Xu
Neural Radiance Fields (NeRF) have emerged as a paradigm-shifting methodology for the photorealistic rendering of objects and environments, enabling the synthesis of novel viewpoints with remarkable fidelity. This is accomplished through the strategic utilization of object-centric camera poses characterized by significant inter-frame overlap. This paper explores a compelling, alternative utility of NeRF: the derivation of point clouds from aggregated urban landscape imagery. The transmutation of street-view data into point clouds is fraught with complexities, attributable to a nexus of interdependent variables. First, high-quality point cloud generation hinges on precise camera poses, yet many datasets suffer from inaccuracies in pose metadata. Also, the standard approach of NeRF is ill-suited for the distinct characteristics of street-view data from autonomous vehicles in vast, open settings. Autonomous vehicle cameras often record with limited overlap, leading to blurring, artifacts, and compromised pavement representation in NeRF-based point clouds. In this paper, we present NeRF2Points, a tailored NeRF variant for urban point cloud synthesis, notable for its high-quality output from RGB inputs alone. Our paper is supported by a bespoke, high-resolution 20-kilometer urban street dataset, designed for point cloud generation and evaluation. NeRF2Points adeptly navigates the inherent challenges of NeRF-based point cloud synthesis through the implementation of the following strategic innovations: (1) Integration of Weighted Iterative Geometric Optimization (WIGO) and Structure from Motion (SfM) for enhanced camera pose accuracy, elevating street-view data precision. (2) Layered Perception and Integrated Modeling (LPiM) is designed for distinct radiance field modeling in urban environments, resulting in coherent point cloud representations.
Read more4/9/2024
👨🏫
0
Depth Supervised Neural Surface Reconstruction from Airborne Imagery
Vincent Hackstein, Paul Fauth-Mayer, Matthias Rothermel, Norbert Haala
While originally developed for novel view synthesis, Neural Radiance Fields (NeRFs) have recently emerged as an alternative to multi-view stereo (MVS). Triggered by a manifold of research activities, promising results have been gained especially for texture-less, transparent, and reflecting surfaces, while such scenarios remain challenging for traditional MVS-based approaches. However, most of these investigations focus on close-range scenarios, with studies for airborne scenarios still missing. For this task, NeRFs face potential difficulties at areas of low image redundancy and weak data evidence, as often found in street canyons, facades or building shadows. Furthermore, training such networks is computationally expensive. Thus, the aim of our work is twofold: First, we investigate the applicability of NeRFs for aerial image blocks representing different characteristics like nadir-only, oblique and high-resolution imagery. Second, during these investigations we demonstrate the benefit of integrating depth priors from tie-point measures, which are provided during presupposed Bundle Block Adjustment. Our work is based on the state-of-the-art framework VolSDF, which models 3D scenes by signed distance functions (SDFs), since this is more applicable for surface reconstruction compared to the standard volumetric representation in vanilla NeRFs. For evaluation, the NeRF-based reconstructions are compared to results of a publicly available benchmark dataset for airborne images.
Read more4/26/2024