Koopman AutoEncoder via Singular Value Decomposition for Data-Driven Long-Term Prediction

0

Sign in to get full access
Overview
- The paper presents a method called "Koopman AutoEncoder via Singular Value Decomposition" for long-term prediction of complex dynamical systems.
- The approach combines the Koopman operator framework, which provides a linear representation of nonlinear dynamics, with singular value decomposition to learn a low-dimensional latent representation.
- The learned model can then be used to make long-term predictions of the system's future behavior.
Plain English Explanation
The paper introduces a technique for long-term prediction of complex dynamical systems. The key idea is to use the Koopman operator framework, which provides a way to represent nonlinear dynamics using a linear operator.
By combining the Koopman operator with singular value decomposition, the authors are able to learn a low-dimensional latent representation of the system's behavior. This learned model can then be used to make long-term predictions about how the system will evolve over time.
The key advantage of this approach is that it can capture the underlying linear structure of nonlinear dynamics, enabling more accurate long-term forecasts compared to traditional nonlinear prediction methods.
Technical Explanation
The paper proposes a method called "Koopman AutoEncoder via Singular Value Decomposition" (KASVD) for data-driven long-term prediction of complex dynamical systems.
The core idea is to leverage the Koopman operator framework, which provides a way to represent nonlinear dynamics using a linear operator. By learning a low-dimensional latent representation of the Koopman operator using singular value decomposition, the authors are able to construct a compact, interpretable model that can be used for long-term prediction.
The KASVD architecture consists of an encoder network that maps the high-dimensional input data to a low-dimensional latent space, and a decoder network that reconstructs the original data from the latent representation. The latent space is designed to capture the linear dynamics of the system, as described by the Koopman operator.
During training, the model is optimized to minimize the reconstruction error between the input data and the decoder output, while also preserving the linear structure of the latent space. This is achieved by incorporating a singular value decomposition loss term, which encourages the latent representations to have an orthonormal basis.
The trained KASVD model can then be used for long-term prediction by iteratively applying the learned Koopman operator to the latent state. This allows the model to forecast the system's future behavior over extended time horizons, even for complex, nonlinear dynamics.
Critical Analysis
The paper presents a novel and promising approach for long-term prediction of dynamical systems. By leveraging the Koopman operator framework and singular value decomposition, the KASVD method is able to learn a low-dimensional, interpretable model that can capture the underlying linear structure of nonlinear dynamics.
One potential limitation of the approach is that it assumes the dynamics can be well-approximated by a linear Koopman operator. In cases where the system exhibits strong nonlinearities or time-varying behavior, the performance of the KASVD model may degrade. The authors acknowledge this and suggest that incorporating more flexible Koopman representations could be an area for future research.
Additionally, the paper does not provide a comprehensive comparison to other state-of-the-art long-term prediction methods, such as recurrent neural networks or Gaussian processes. Evaluating the KASVD model's performance relative to these alternative approaches would help further contextualize the method's strengths and weaknesses.
Overall, the KASVD technique represents an interesting and potentially valuable contribution to the field of data-driven dynamical systems modeling and prediction. The authors have demonstrated the approach on several test cases, but further validation on real-world, high-dimensional systems would be beneficial to assess its practical applicability and limitations.
Conclusion
The paper introduces a novel method called "Koopman AutoEncoder via Singular Value Decomposition" (KASVD) for long-term prediction of complex dynamical systems. The approach leverages the Koopman operator framework to learn a low-dimensional, linear representation of the system's nonlinear dynamics, which can then be used to make accurate long-term forecasts.
The key innovation of the KASVD method is the combination of the Koopman operator with singular value decomposition, which allows for the construction of a compact, interpretable model that preserves the underlying linear structure of the dynamics. This makes the approach particularly well-suited for applications where long-term prediction is critical, such as in climate modeling, fluid dynamics, or biological systems.
While the paper demonstrates the effectiveness of the KASVD technique on several test cases, further research is needed to fully understand its limitations and assess its performance relative to other state-of-the-art long-term prediction methods. Nonetheless, this work represents an important contribution to the field of data-driven dynamical systems modeling and could have significant implications for a wide range of scientific and engineering applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Koopman AutoEncoder via Singular Value Decomposition for Data-Driven Long-Term Prediction
Jinho Choi, Sivaram Krishnan, Jihong Park
The Koopman autoencoder, a data-driven technique, has gained traction for modeling nonlinear dynamics using deep learning methods in recent years. Given the linear characteristics inherent to the Koopman operator, controlling its eigenvalues offers an opportunity to enhance long-term prediction performance, a critical task for forecasting future trends in time-series datasets with long-term behaviors. However, controlling eigenvalues is challenging due to high computational complexity and difficulties in managing them during the training process. To tackle this issue, we propose leveraging the singular value decomposition (SVD) of the Koopman matrix to adjust the singular values for better long-term prediction. Experimental results demonstrate that, during training, the loss term for singular values effectively brings the eigenvalues close to the unit circle, and the proposed approach outperforms existing baseline methods for long-term prediction tasks.
Read more8/22/2024
0
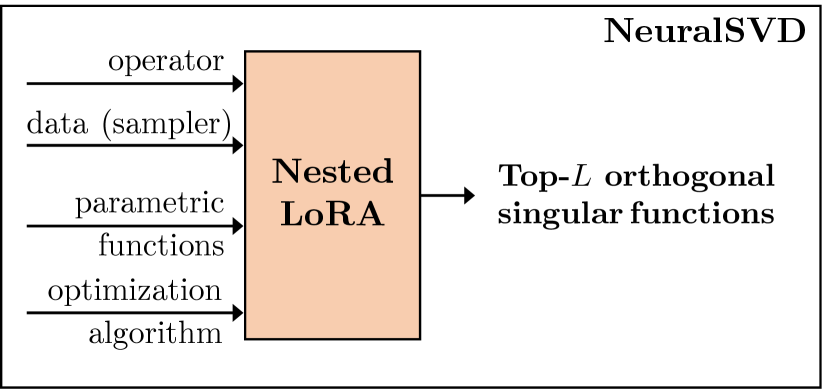
Operator SVD with Neural Networks via Nested Low-Rank Approximation
J. Jon Ryu, Xiangxiang Xu, H. S. Melihcan Erol, Yuheng Bu, Lizhong Zheng, Gregory W. Wornell
Computing eigenvalue decomposition (EVD) of a given linear operator, or finding its leading eigenvalues and eigenfunctions, is a fundamental task in many machine learning and scientific computing problems. For high-dimensional eigenvalue problems, training neural networks to parameterize the eigenfunctions is considered as a promising alternative to the classical numerical linear algebra techniques. This paper proposes a new optimization framework based on the low-rank approximation characterization of a truncated singular value decomposition, accompanied by new techniques called emph{nesting} for learning the top-$L$ singular values and singular functions in the correct order. The proposed method promotes the desired orthogonality in the learned functions implicitly and efficiently via an unconstrained optimization formulation, which is easy to solve with off-the-shelf gradient-based optimization algorithms. We demonstrate the effectiveness of the proposed optimization framework for use cases in computational physics and machine learning.
Read more8/22/2024

0
Mori-Zwanzig latent space Koopman closure for nonlinear autoencoder
Priyam Gupta, Peter J. Schmid, Denis Sipp, Taraneh Sayadi, Georgios Rigas
The Koopman operator presents an attractive approach to achieve global linearization of nonlinear systems, making it a valuable method for simplifying the understanding of complex dynamics. While data-driven methodologies have exhibited promise in approximating finite Koopman operators, they grapple with various challenges, such as the judicious selection of observables, dimensionality reduction, and the ability to predict complex system behaviors accurately. This study presents a novel approach termed Mori-Zwanzig autoencoder (MZ-AE) to robustly approximate the Koopman operator in low-dimensional spaces. The proposed method leverages a nonlinear autoencoder to extract key observables for approximating a finite invariant Koopman subspace and integrates a non-Markovian correction mechanism using the Mori-Zwanzig formalism. Consequently, this approach yields a closed representation of dynamics within the latent manifold of the nonlinear autoencoder, thereby enhancing the precision and stability of the Koopman operator approximation. Demonstrations showcase the technique's ability to capture regime transitions in the flow around a cylinder. It also provides a low dimensional approximation for Kuramoto-Sivashinsky with promising short-term predictability and robust long-term statistical performance. By bridging the gap between data-driven techniques and the mathematical foundations of Koopman theory, MZ-AE offers a promising avenue for improved understanding and prediction of complex nonlinear dynamics.
Read more4/17/2024
🎲
0
SVD-AE: Simple Autoencoders for Collaborative Filtering
Seoyoung Hong, Jeongwhan Choi, Yeon-Chang Lee, Srijan Kumar, Noseong Park
Collaborative filtering (CF) methods for recommendation systems have been extensively researched, ranging from matrix factorization and autoencoder-based to graph filtering-based methods. Recently, lightweight methods that require almost no training have been recently proposed to reduce overall computation. However, existing methods still have room to improve the trade-offs among accuracy, efficiency, and robustness. In particular, there are no well-designed closed-form studies for emph{balanced} CF in terms of the aforementioned trade-offs. In this paper, we design SVD-AE, a simple yet effective singular vector decomposition (SVD)-based linear autoencoder, whose closed-form solution can be defined based on SVD for CF. SVD-AE does not require iterative training processes as its closed-form solution can be calculated at once. Furthermore, given the noisy nature of the rating matrix, we explore the robustness against such noisy interactions of existing CF methods and our SVD-AE. As a result, we demonstrate that our simple design choice based on truncated SVD can be used to strengthen the noise robustness of the recommendation while improving efficiency. Code is available at https://github.com/seoyoungh/svd-ae.
Read more5/9/2024