Mori-Zwanzig latent space Koopman closure for nonlinear autoencoder

0

Sign in to get full access
Overview
- This paper presents a novel approach to model order reduction for nonlinear dynamical systems using a Mori-Zwanzig (MZ) formalism and Koopman operator theory.
- The proposed method, called the "Mori-Zwanzig latent space Koopman closure for nonlinear autoencoder," aims to enhance the interpretability and reliability of autonomous systems by learning a low-dimensional latent representation of the system dynamics.
- The paper builds upon previous research in data-driven model order reduction, latent space representations, and autoencoder-based novelty detection.
Plain English Explanation
The paper presents a new way to simplify complex dynamical systems by finding a low-dimensional representation of the system's behavior. This is important for autonomous systems like self-driving cars, where we need to understand and predict the system's behavior reliably.
The key idea is to use an autoencoder, a type of neural network that can compress and decompress data, to learn a simplified, "latent" representation of the system. This latent representation captures the essential features of the system's dynamics, making it easier to analyze and control.
The authors draw on two important mathematical frameworks to achieve this: Mori-Zwanzig (MZ) theory and Koopman operator theory. MZ theory provides a way to separate the essential and secondary parts of the system dynamics, while Koopman operator theory allows the authors to learn a linear operator that can predict the evolution of the latent state over time.
By combining these techniques, the authors create a "Mori-Zwanzig latent space Koopman closure" that can effectively model nonlinear dynamical systems using a low-dimensional latent representation. This approach has the potential to enhance the interpretability and reliability of autonomous systems by providing a clearer understanding of the underlying system dynamics.
Technical Explanation
The paper proposes a novel approach to data-driven model order reduction for nonlinear dynamical systems using a Mori-Zwanzig (MZ) formalism and Koopman operator theory.
The key components of the method are:
-
Autoencoder architecture: The authors use a nonlinear autoencoder to learn a low-dimensional latent representation of the system state. This latent space captures the essential features of the system dynamics.
-
Mori-Zwanzig (MZ) formalism: MZ theory is used to split the system dynamics into "resolved" and "unresolved" parts. The resolved part represents the essential dynamics in the latent space, while the unresolved part captures the high-frequency, secondary dynamics.
-
Koopman operator closure: The authors learn a linear Koopman operator that can predict the evolution of the latent state over time. This provides a closure for the resolved dynamics, allowing for reliable long-term prediction.
The proposed "Mori-Zwanzig latent space Koopman closure" framework integrates these components to effectively model nonlinear dynamical systems using a low-dimensional latent representation. This approach builds upon previous research in latent space representations and autoencoder-based novelty detection.
Critical Analysis
The paper presents a promising approach to model order reduction for nonlinear dynamical systems, with several key strengths and potential limitations:
Strengths:
- The integration of MZ theory and Koopman operator theory provides a rigorous mathematical framework for learning a low-dimensional latent representation of the system dynamics.
- The use of an autoencoder architecture allows for nonlinear dimensionality reduction, which is crucial for capturing the complexity of real-world dynamical systems.
- The authors demonstrate the effectiveness of their approach on several benchmark problems, highlighting its potential for practical applications.
Limitations:
- The paper does not provide a comprehensive analysis of the method's sensitivity to hyperparameters or the quality of the latent representation learned by the autoencoder.
- The performance of the Koopman operator closure may be limited by the linearity assumption, which may not fully capture the nonlinear dynamics of complex systems.
- The authors do not discuss the computational complexity or scalability of their approach, which could be a concern for large-scale or high-dimensional dynamical systems.
Further research could explore hybrid approaches that combine the strengths of the proposed method with other techniques, such as mixture of experts models, to address these potential limitations and further enhance the interpretability and reliability of autonomous systems.
Conclusion
This paper presents a novel framework for model order reduction of nonlinear dynamical systems, combining Mori-Zwanzig theory and Koopman operator theory with a nonlinear autoencoder architecture. The resulting "Mori-Zwanzig latent space Koopman closure" approach aims to learn a low-dimensional latent representation that captures the essential features of the system dynamics, enabling reliable long-term prediction and enhanced interpretability.
The authors demonstrate the effectiveness of their method on various benchmark problems, highlighting its potential for practical applications in autonomous systems and other domains that require a deep understanding of complex nonlinear dynamics. While the paper presents a promising technical solution, future research should further explore the method's limitations and investigate hybrid approaches to address them, ultimately advancing the field of model order reduction and contributing to the development of more reliable and interpretable autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Mori-Zwanzig latent space Koopman closure for nonlinear autoencoder
Priyam Gupta, Peter J. Schmid, Denis Sipp, Taraneh Sayadi, Georgios Rigas
The Koopman operator presents an attractive approach to achieve global linearization of nonlinear systems, making it a valuable method for simplifying the understanding of complex dynamics. While data-driven methodologies have exhibited promise in approximating finite Koopman operators, they grapple with various challenges, such as the judicious selection of observables, dimensionality reduction, and the ability to predict complex system behaviors accurately. This study presents a novel approach termed Mori-Zwanzig autoencoder (MZ-AE) to robustly approximate the Koopman operator in low-dimensional spaces. The proposed method leverages a nonlinear autoencoder to extract key observables for approximating a finite invariant Koopman subspace and integrates a non-Markovian correction mechanism using the Mori-Zwanzig formalism. Consequently, this approach yields a closed representation of dynamics within the latent manifold of the nonlinear autoencoder, thereby enhancing the precision and stability of the Koopman operator approximation. Demonstrations showcase the technique's ability to capture regime transitions in the flow around a cylinder. It also provides a low dimensional approximation for Kuramoto-Sivashinsky with promising short-term predictability and robust long-term statistical performance. By bridging the gap between data-driven techniques and the mathematical foundations of Koopman theory, MZ-AE offers a promising avenue for improved understanding and prediction of complex nonlinear dynamics.
Read more4/17/2024

0
Koopman AutoEncoder via Singular Value Decomposition for Data-Driven Long-Term Prediction
Jinho Choi, Sivaram Krishnan, Jihong Park
The Koopman autoencoder, a data-driven technique, has gained traction for modeling nonlinear dynamics using deep learning methods in recent years. Given the linear characteristics inherent to the Koopman operator, controlling its eigenvalues offers an opportunity to enhance long-term prediction performance, a critical task for forecasting future trends in time-series datasets with long-term behaviors. However, controlling eigenvalues is challenging due to high computational complexity and difficulties in managing them during the training process. To tackle this issue, we propose leveraging the singular value decomposition (SVD) of the Koopman matrix to adjust the singular values for better long-term prediction. Experimental results demonstrate that, during training, the loss term for singular values effectively brings the eigenvalues close to the unit circle, and the proposed approach outperforms existing baseline methods for long-term prediction tasks.
Read more8/22/2024
0
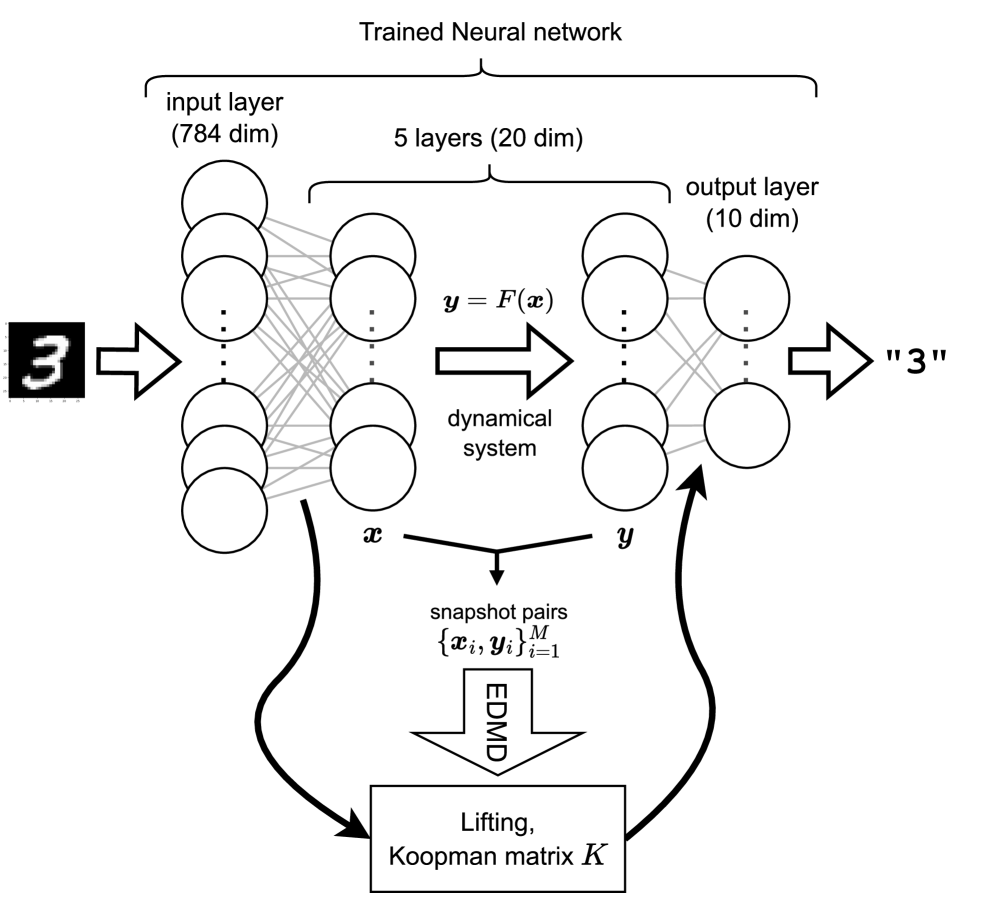
Extraction of nonlinearity in neural networks with Koopman operator
Naoki Sugishita, Kayo Kinjo, Jun Ohkubo
Nonlinearity plays a crucial role in deep neural networks. In this paper, we investigate the degree to which the nonlinearity of the neural network is essential. For this purpose, we employ the Koopman operator, extended dynamic mode decomposition, and the tensor-train format. The Koopman operator approach has been recently developed in physics and nonlinear sciences; the Koopman operator deals with the time evolution in the observable space instead of the state space. Since we can replace the nonlinearity in the state space with the linearity in the observable space, it is a hopeful candidate for understanding complex behavior in nonlinear systems. Here, we analyze learned neural networks for the classification problems. As a result, the replacement of the nonlinear middle layers with the Koopman matrix yields enough accuracy in numerical experiments. In addition, we confirm that the pruning of the Koopman matrix gives sufficient accuracy even at high compression ratios. These results indicate the possibility of extracting some features in the neural networks with the Koopman operator approach.
Read more6/28/2024
0
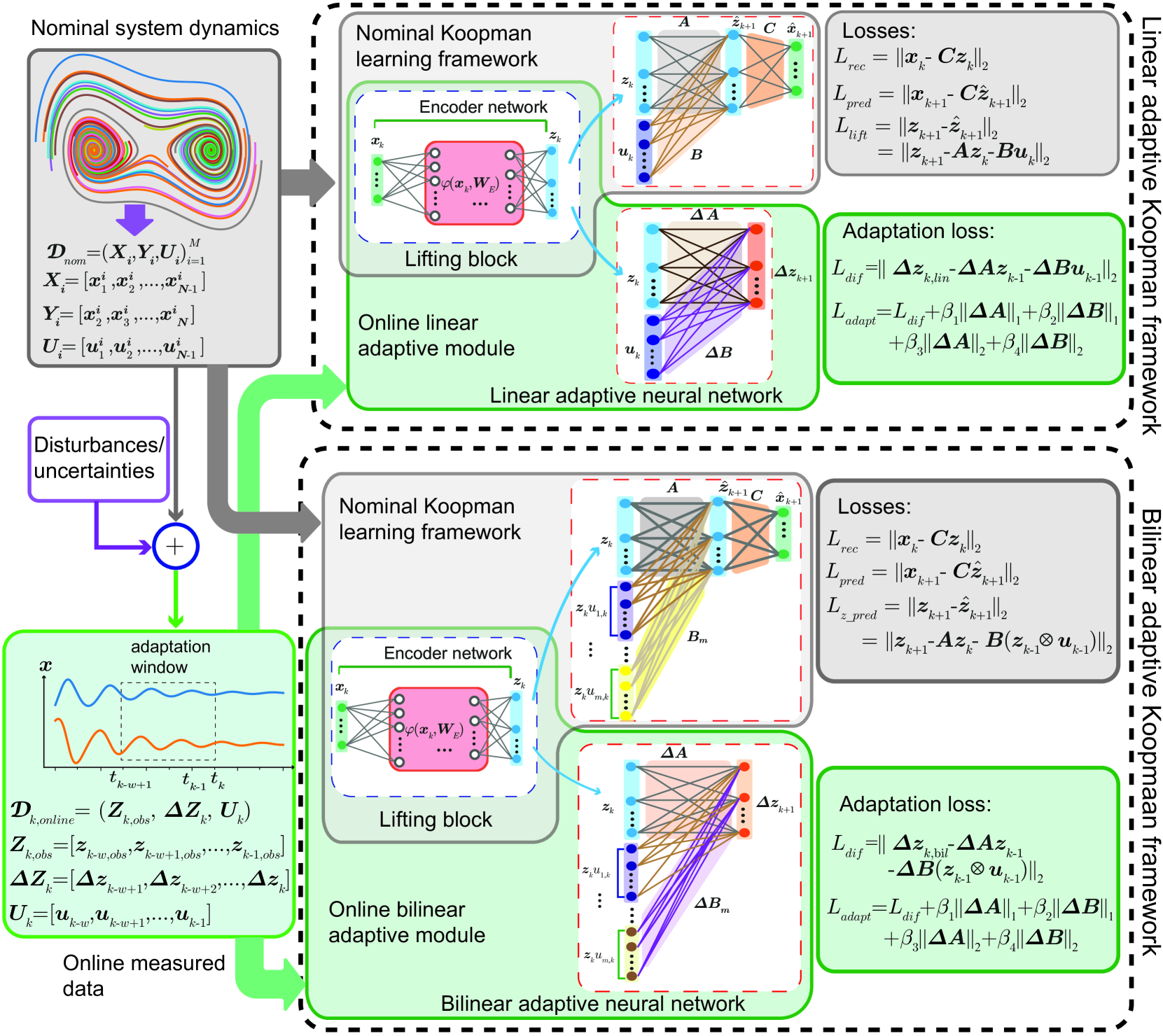
Adaptive Koopman Embedding for Robust Control of Complex Dynamical Systems
Rajpal Singh, Chandan Kumar Sah, Jishnu Keshavan
The discovery of linear embedding is the key to the synthesis of linear control techniques for nonlinear systems. In recent years, while Koopman operator theory has become a prominent approach for learning these linear embeddings through data-driven methods, these algorithms often exhibit limitations in generalizability beyond the distribution captured by training data and are not robust to changes in the nominal system dynamics induced by intrinsic or environmental factors. To overcome these limitations, this study presents an adaptive Koopman architecture capable of responding to the changes in system dynamics online. The proposed framework initially employs an autoencoder-based neural network that utilizes input-output information from the nominal system to learn the corresponding Koopman embedding offline. Subsequently, we augment this nominal Koopman architecture with a feed-forward neural network that learns to modify the nominal dynamics in response to any deviation between the predicted and observed lifted states, leading to improved generalization and robustness to a wide range of uncertainties and disturbances compared to contemporary methods. Extensive tracking control simulations, which are undertaken by integrating the proposed scheme within a Model Predictive Control framework, are used to highlight its robustness against measurement noise, disturbances, and parametric variations in system dynamics.
Read more5/21/2024