Large-scale DSM registration via motion averaging

0

Sign in to get full access
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Large-scale DSM registration via motion averaging
Ningli Xu, Rongjun Qin
Generating wide-area digital surface models (DSMs) requires registering a large number of individual, and partially overlapped DSMs. This presents a challenging problem for a typical registration algorithm, since when a large number of observations from these multiple DSMs are considered, it may easily cause memory overflow. Sequential registration algorithms, although can significantly reduce the computation, are especially vulnerable for small overlapped pairs, leading to a large error accumulation. In this work, we propose a novel solution that builds the DSM registration task as a motion averaging problem: pair-wise DSMs are registered to build a scene graph, with edges representing relative poses between DSMs. Specifically, based on the grid structure of the large DSM, the pair-wise registration is performed using a novel nearest neighbor search method. We show that the scene graph can be optimized via an extremely fast motion average algorithm with O(N) complexity (N refers to the number of images). Evaluation of high-resolution satellite-derived DSM demonstrates significant improvement in computation and accuracy.
Read more6/4/2024

0
DMSA -- Dense Multi Scan Adjustment for LiDAR Inertial Odometry and Global Optimization
David Skuddis, Norbert Haala
We propose a new method for fine registering multiple point clouds simultaneously. The approach is characterized by being dense, therefore point clouds are not reduced to pre-selected features in advance. Furthermore, the approach is robust against small overlaps and dynamic objects, since no direct correspondences are assumed between point clouds. Instead, all points are merged into a global point cloud, whose scattering is then iteratively reduced. This is achieved by dividing the global point cloud into uniform grid cells whose contents are subsequently modeled by normal distributions. We show that the proposed approach can be used in a sliding window continuous trajectory optimization combined with IMU measurements to obtain a highly accurate and robust LiDAR inertial odometry estimation. Furthermore, we show that the proposed approach is also suitable for large scale keyframe optimization to increase accuracy. We provide the source code and some experimental data on https://github.com/davidskdds/DMSA_LiDAR_SLAM.git.
Read more6/18/2024
0
Efficient and Distributed Large-Scale 3D Map Registration using Tomographic Features
Halil Utku Unlu, Anthony Tzes, Prashanth Krishnamurthy, Farshad Khorrami
A robust, resource-efficient, distributed, and minimally parameterized 3D map matching and merging algorithm is proposed. The suggested algorithm utilizes tomographic features from 2D projections of horizontal cross-sections of gravity-aligned local maps, and matches these projection slices at all possible height differences, enabling the estimation of four degrees of freedom in an efficient and parallelizable manner. The advocated algorithm improves state-of-the-art feature extraction and registration pipelines by an order of magnitude in memory use and execution time. Experimental studies are offered to investigate the efficiency of this 3D map merging scheme.
Read more7/1/2024
0
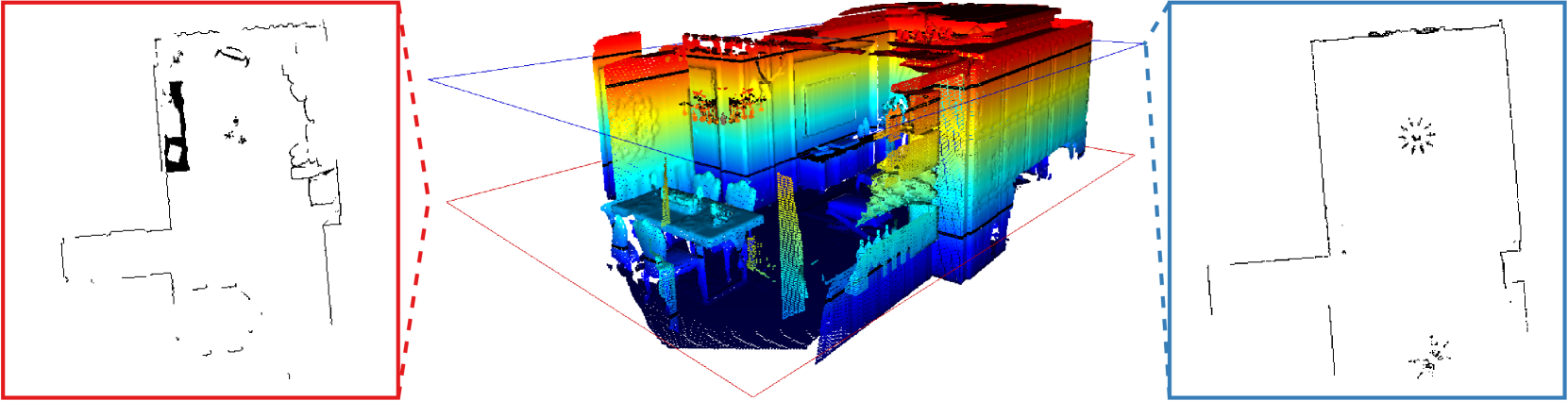
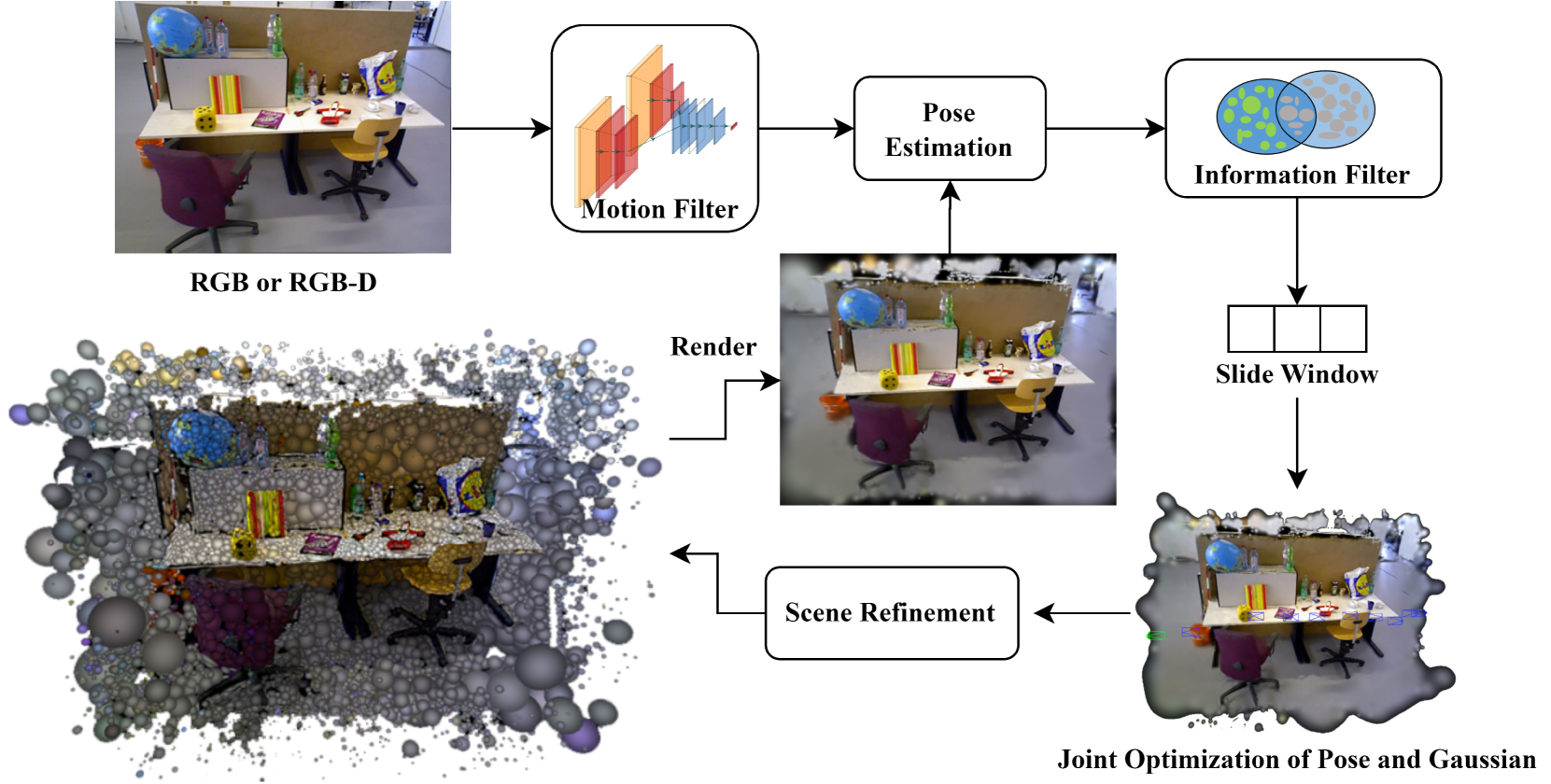
MotionGS : Compact Gaussian Splatting SLAM by Motion Filter
Xinli Guo, Weidong Zhang, Ruonan Liu, Peng Han, Hongtian Chen
With their high-fidelity scene representation capability, the attention of SLAM field is deeply attracted by the Neural Radiation Field (NeRF) and 3D Gaussian Splatting (3DGS). Recently, there has been a surge in NeRF-based SLAM, while 3DGS-based SLAM is sparse. A novel 3DGS-based SLAM approach with a fusion of deep visual feature, dual keyframe selection and 3DGS is presented in this paper. Compared with the existing methods, the proposed tracking is achieved by feature extraction and motion filter on each frame. The joint optimization of poses and 3D Gaussians runs through the entire mapping process. Additionally, the coarse-to-fine pose estimation and compact Gaussian scene representation are implemented by dual keyframe selection and novel loss functions. Experimental results demonstrate that the proposed algorithm not only outperforms the existing methods in tracking and mapping, but also has less memory usage.
Read more6/3/2024