Efficient and Distributed Large-Scale 3D Map Registration using Tomographic Features

0
Sign in to get full access
Overview
- This paper presents an efficient and distributed approach for large-scale 3D map registration using tomographic features.
- The proposed method leverages a distributed processing framework to enable scalable and parallelized registration of massive 3D point cloud data.
- The key innovation is the use of tomographic features, which capture structural information about the 3D environment and enable robust and efficient registration across diverse datasets.
Plain English Explanation
Creating detailed 3D maps of large environments is an important task for various applications, such as autonomous vehicles, infrastructure planning, and urban modeling. However, combining multiple 3D point cloud datasets from different sources into a unified 3D map can be a challenging and computationally intensive process.
This paper introduces a new approach that makes the 3D map registration process more efficient and scalable. The researchers use a technique called "tomographic features" to capture the structural information in the 3D data, which helps the registration algorithm match up the different datasets more accurately and quickly. By distributing the computation across multiple machines, the method can handle extremely large 3D point cloud datasets that would be too slow to process on a single computer.
The key insights are that the tomographic features provide a robust and compact representation of the 3D environment, and the distributed processing framework enables parallel computation to scale up to massive datasets. This combination of novel features and distributed architecture allows the system to register large-scale 3D maps much more efficiently than previous methods.
Technical Explanation
The paper proposes an approach for efficient and distributed large-scale 3D map registration using tomographic features. The core idea is to leverage a distributed processing framework to enable scalable and parallelized registration of massive 3D point cloud data, while using tomographic features to capture structural information about the 3D environment and enable robust and efficient registration.
The tomographic features are computed by discretizing the 3D space into voxels and aggregating local point cloud statistics within each voxel. This compact representation of the 3D geometry allows for efficient matching and registration across different point cloud datasets. The distributed processing framework is built on top of FreeReg, a modular system for autonomous map merging and Frame, which provides a unified interface for different registration algorithms.
The authors evaluate their approach on large-scale 3D point cloud datasets and demonstrate significant improvements in registration accuracy and computational efficiency compared to state-of-the-art methods, such as Efficient and Robust Point Cloud Registration via Heuristics and Efficient Deterministic Search Strategy based on Residual Projections. They also show the benefits of the tomographic features over other feature representations, such as those used in RGBD-GLUE.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed approach, considering various large-scale 3D point cloud datasets and comparing against state-of-the-art registration methods. The authors acknowledge some limitations, such as the potential loss of fine-grained details when using the tomographic features, and suggest further research on adaptive voxel sizes and integration with other feature representations.
One potential area for improvement could be to explore the robustness of the tomographic features to different sensor modalities, noise levels, and environmental conditions, as the evaluation in the paper focuses primarily on high-quality LiDAR data. Additionally, the authors could investigate the tradeoffs between the computational efficiency gains and any potential loss of registration accuracy, especially for smaller-scale applications where the distributed processing may not be as critical.
Overall, the paper makes a compelling case for the effectiveness of the proposed approach, and the combination of tomographic features and distributed processing is a promising direction for enabling efficient and scalable 3D map registration in real-world applications.
Conclusion
This paper presents an efficient and distributed approach for large-scale 3D map registration using tomographic features. The key innovations are the use of tomographic features to capture the structural information in 3D point clouds, and the leveraging of a distributed processing framework to enable scalable and parallelized registration of massive datasets.
The results demonstrate significant improvements in registration accuracy and computational efficiency compared to state-of-the-art methods, making the proposed approach a promising solution for real-world applications that require the integration of large-scale 3D data, such as autonomous vehicles, urban planning, and infrastructure monitoring. The insights from this research could also inspire further developments in robust and scalable 3D perception and mapping technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Efficient and Distributed Large-Scale 3D Map Registration using Tomographic Features
Halil Utku Unlu, Anthony Tzes, Prashanth Krishnamurthy, Farshad Khorrami
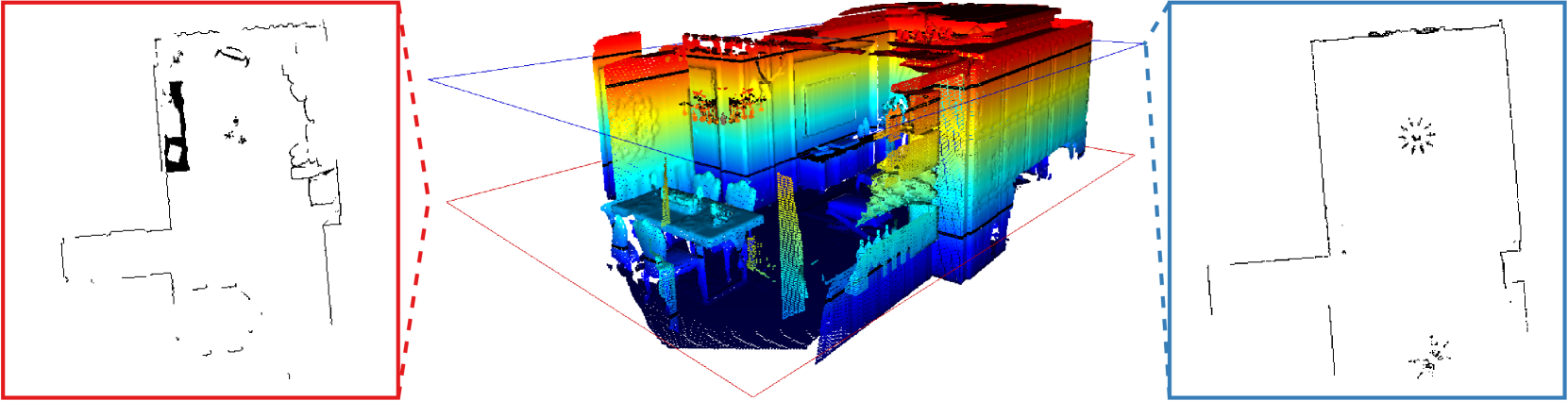
A robust, resource-efficient, distributed, and minimally parameterized 3D map matching and merging algorithm is proposed. The suggested algorithm utilizes tomographic features from 2D projections of horizontal cross-sections of gravity-aligned local maps, and matches these projection slices at all possible height differences, enabling the estimation of four degrees of freedom in an efficient and parallelizable manner. The advocated algorithm improves state-of-the-art feature extraction and registration pipelines by an order of magnitude in memory use and execution time. Experimental studies are offered to investigate the efficiency of this 3D map merging scheme.
Read more7/1/2024

0
Volumetric Semantically Consistent 3D Panoptic Mapping
Yang Miao, Iro Armeni, Marc Pollefeys, Daniel Barath
We introduce an online 2D-to-3D semantic instance mapping algorithm aimed at generating comprehensive, accurate, and efficient semantic 3D maps suitable for autonomous agents in unstructured environments. The proposed approach is based on a Voxel-TSDF representation used in recent algorithms. It introduces novel ways of integrating semantic prediction confidence during mapping, producing semantic and instance-consistent 3D regions. Further improvements are achieved by graph optimization-based semantic labeling and instance refinement. The proposed method achieves accuracy superior to the state of the art on public large-scale datasets, improving on a number of widely used metrics. We also highlight a downfall in the evaluation of recent studies: using the ground truth trajectory as input instead of a SLAM-estimated one substantially affects the accuracy, creating a large gap between the reported results and the actual performance on real-world data.
Read more7/9/2024
0
FreeReg: Image-to-Point Cloud Registration Leveraging Pretrained Diffusion Models and Monocular Depth Estimators
Haiping Wang, Yuan Liu, Bing Wang, Yujing Sun, Zhen Dong, Wenping Wang, Bisheng Yang
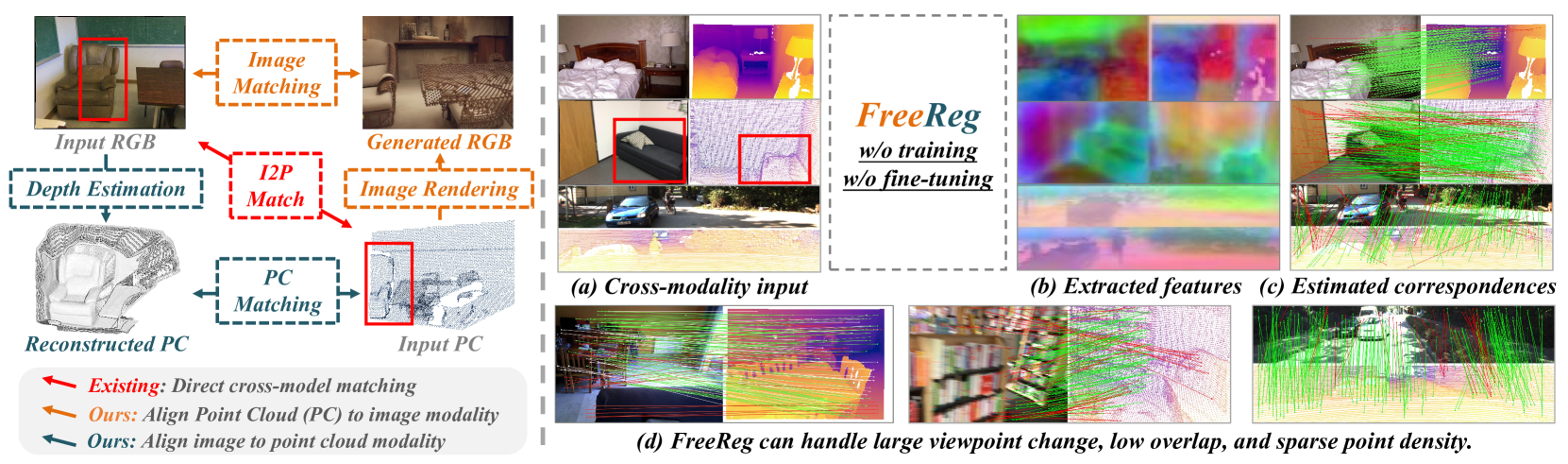
Matching cross-modality features between images and point clouds is a fundamental problem for image-to-point cloud registration. However, due to the modality difference between images and points, it is difficult to learn robust and discriminative cross-modality features by existing metric learning methods for feature matching. Instead of applying metric learning on cross-modality data, we propose to unify the modality between images and point clouds by pretrained large-scale models first, and then establish robust correspondence within the same modality. We show that the intermediate features, called diffusion features, extracted by depth-to-image diffusion models are semantically consistent between images and point clouds, which enables the building of coarse but robust cross-modality correspondences. We further extract geometric features on depth maps produced by the monocular depth estimator. By matching such geometric features, we significantly improve the accuracy of the coarse correspondences produced by diffusion features. Extensive experiments demonstrate that without any task-specific training, direct utilization of both features produces accurate image-to-point cloud registration. On three public indoor and outdoor benchmarks, the proposed method averagely achieves a 20.6 percent improvement in Inlier Ratio, a three-fold higher Inlier Number, and a 48.6 percent improvement in Registration Recall than existing state-of-the-arts.
Read more4/16/2024
🗣️
0
FRAME: A Modular Framework for Autonomous Map-merging: Advancements in the Field
Nikolaos Stathoulopoulos, Bjorn Lindqvist, Anton Koval, Ali-akbar Agha-mohammadi, George Nikolakopoulos
In this article, a novel approach for merging 3D point cloud maps in the context of egocentric multi-robot exploration is presented. Unlike traditional methods, the proposed approach leverages state-of-the-art place recognition and learned descriptors to efficiently detect overlap between maps, eliminating the need for the time-consuming global feature extraction and feature matching process. The estimated overlapping regions are used to calculate a homogeneous rigid transform, which serves as an initial condition for the GICP point cloud registration algorithm to refine the alignment between the maps. The advantages of this approach include faster processing time, improved accuracy, and increased robustness in challenging environments. Furthermore, the effectiveness of the proposed framework is successfully demonstrated through multiple field missions of robot exploration in a variety of different underground environments.
Read more8/29/2024