LCSim: A Large-Scale Controllable Traffic Simulator
2406.19781
0
0

Abstract
With the rapid development of urban transportation and the continuous advancement in autonomous vehicles, the demand for safely and efficiently testing autonomous driving and traffic optimization algorithms arises, which needs accurate modeling of large-scale urban traffic scenarios. Existing traffic simulation systems encounter two significant limitations. Firstly, they often rely on open-source datasets or manually crafted maps, constraining the scale of simulations. Secondly, vehicle models within these systems tend to be either oversimplified or lack controllability, compromising the authenticity and diversity of the simulations. In this paper, we propose LCSim, a large-scale controllable traffic simulator. LCSim provides map tools for constructing unified high-definition map (HD map) descriptions from open-source datasets including Waymo and Argoverse or publicly available data sources like OpenStreetMap to scale up the simulation scenarios. Also, we integrate diffusion-based traffic simulation into the simulator for realistic and controllable microscopic traffic flow modeling. By leveraging these features, LCSim provides realistic and diverse virtual traffic environments. Code and Demos are available at https://github.com/tsinghua-fib-lab/LCSim.
Create account to get full access
Overview
- This paper introduces LCSim, a large-scale, controllable traffic simulator designed to support research and development in areas like autonomous vehicles, traffic management, and transportation planning.
- LCSim allows users to create realistic, large-scale traffic scenarios with customizable road networks, vehicle types, and driver behaviors.
- The simulator provides a range of control and observation capabilities to enable advanced traffic modeling and analysis.
Plain English Explanation
LCSim: A Large-Scale Controllable Traffic Simulator presents a new traffic simulation tool that can model complex, real-world traffic scenarios on a large scale. This is important for researchers and developers working on technologies like self-driving cars, traffic optimization systems, and transportation planning.
The key idea behind LCSim is to give users the ability to create highly customizable traffic scenarios. Users can design the road network, set the characteristics of different vehicle types, and define driver behaviors. This flexibility allows the simulator to capture the nuances of real-world traffic, which is crucial for testing and evaluating new transportation technologies in a safe and controlled environment.
For example, researchers working on autonomous vehicles could use LCSim to test their algorithms in scenarios with mixed traffic (self-driving and human-driven vehicles), challenging weather conditions, or emergency situations. Urban planners could use the simulator to experiment with changes to road networks and traffic control measures to optimize traffic flow and reduce congestion.
Overall, LCSim provides a powerful platform for advancing research and development in the transportation sector, allowing researchers and developers to explore complex traffic scenarios that would be difficult or dangerous to test in the real world.
Technical Explanation
LCSim: A Large-Scale Controllable Traffic Simulator presents a novel traffic simulation system designed to support a wide range of applications, from autonomous vehicle testing to transportation planning.
The key features of LCSim include:
-
Large-Scale Simulation: The system can model traffic scenarios involving thousands of vehicles across extensive road networks, enabling the study of complex, real-world traffic patterns.
-
High Customizability: Users can define the road network, vehicle types, and driver behaviors, allowing them to create highly realistic and tailored traffic scenarios.
-
Controllable Simulation: LCSim provides a range of control and observation capabilities, such as the ability to dynamically adjust traffic signals, monitor vehicle trajectories, and inject perturbations into the simulation.
-
Scalable and Efficient: The simulator leverages parallel computing and GPU acceleration techniques to achieve high-performance simulation at scale, enabling fast exploration of alternative scenarios.
The system architecture of LCSim consists of several key components:
- Road Network Manager: Responsible for defining the road network and handling the spatial representation of the environment.
- Vehicle Manager: Manages the simulation of individual vehicles, including their dynamics, behaviors, and interactions.
- Traffic Control Manager: Coordinates the control of traffic signals, lane closures, and other traffic management measures.
- Visualization and Logging: Provides real-time visualization of the simulation and logging capabilities for data analysis.
The paper presents several use cases and experimental results demonstrating the capabilities of LCSim, including large-scale traffic simulations, autonomous vehicle testing, and transportation planning scenarios. The results highlight the simulator's ability to accurately model complex traffic dynamics and its potential to accelerate research and development in the transportation domain.
Critical Analysis
The paper presents a compelling and well-designed traffic simulation system, but there are a few areas that could be explored further:
-
Validation: While the paper demonstrates the simulator's capabilities through various use cases, a more comprehensive validation of the simulation accuracy against real-world data would strengthen the credibility of the system.
-
Behavioral Modeling: The paper briefly mentions the customizability of driver behaviors, but more details on the modeling approaches and their validation would be useful for researchers looking to leverage LCSim for their work.
-
Performance Benchmarking: The paper discusses the simulator's scalability and efficiency, but a more detailed performance analysis, including comparisons to other traffic simulation tools, would help users assess the system's suitability for their specific needs.
-
Integration with External Systems: The paper focuses on the standalone capabilities of LCSim, but exploring how it could be integrated with other transportation modeling or planning tools could expand its usefulness in real-world applications.
Despite these potential areas for improvement, LCSim: A Large-Scale Controllable Traffic Simulator represents a significant contribution to the field of transportation research and development, providing a powerful and flexible platform for advancing the state of the art in areas like autonomous vehicles, traffic management, and transportation planning.
Conclusion
LCSim: A Large-Scale Controllable Traffic Simulator introduces a powerful and flexible tool for modeling complex, real-world traffic scenarios at scale. By providing users with extensive control and customization capabilities, the simulator enables researchers and developers to explore a wide range of transportation-related problems, from autonomous vehicle testing to traffic optimization.
The system's scalability, efficiency, and broad range of features make it a valuable addition to the transportation research and development ecosystem, with the potential to accelerate progress in areas critical to the future of mobility and urban planning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
SAFE-SIM: Safety-Critical Closed-Loop Traffic Simulation with Controllable Adversaries
Wei-Jer Chang, Francesco Pittaluga, Masayoshi Tomizuka, Wei Zhan, Manmohan Chandraker
0
0
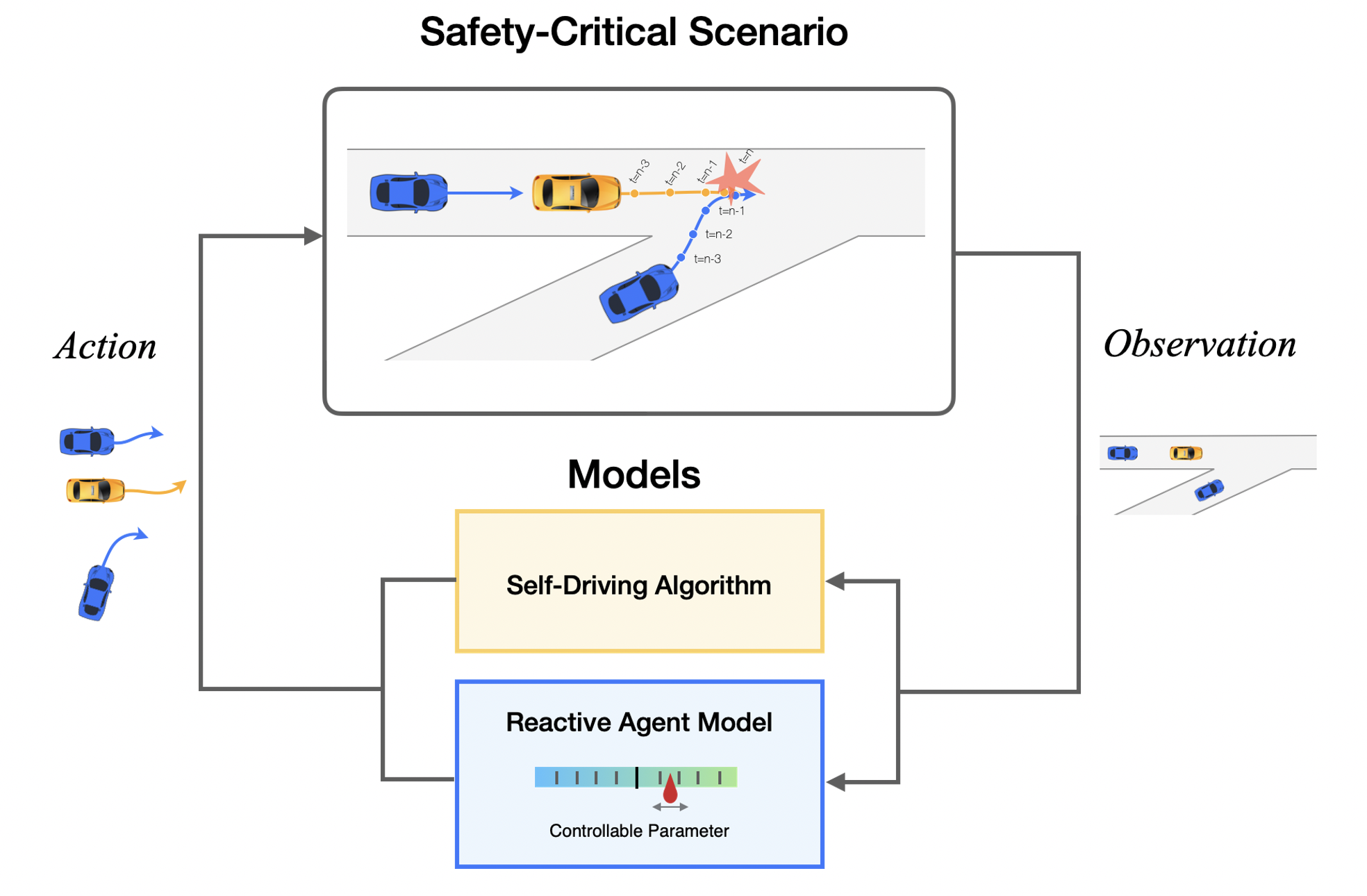
Evaluating the performance of autonomous vehicle planning algorithms necessitates simulating long-tail safety-critical traffic scenarios. However, traditional methods for generating such scenarios often fall short in terms of controllability and realism and neglect the dynamics of agent interactions. To mitigate these limitations, we introduce SAFE-SIM, a novel diffusion-based controllable closed-loop safety-critical simulation framework. Our approach yields two distinct advantages: 1) the generation of realistic long-tail safety-critical scenarios that closely emulate real-world conditions, and 2) enhanced controllability, enabling more comprehensive and interactive evaluations. We develop a novel approach to simulate safety-critical scenarios through an adversarial term in the denoising process, which allows an adversarial agent to challenge a planner with plausible maneuvers while all agents in the scene exhibit reactive and realistic behaviors. Furthermore, we propose novel guidance objectives and a partial diffusion process that enables a user to control key aspects of the generated scenarios, such as the collision type and aggressiveness of the adversarial driver, while maintaining the realism of the behavior. We validate our framework empirically using the NuScenes dataset, demonstrating improvements in both realism and controllability. These findings affirm that diffusion models provide a robust and versatile foundation for safety-critical, interactive traffic simulation, extending their utility across the broader landscape of autonomous driving. For supplementary videos, visit our project at https://safe-sim.github.io/.
6/18/2024

A GPU-accelerated Large-scale Simulator for Transportation System Optimization Benchmarking
Jun Zhang, Wenxuan Ao, Junbo Yan, Depeng Jin, Yong Li
0
0
With the development of artificial intelligence techniques, transportation system optimization is evolving from traditional methods relying on expert experience to simulation and learning-based decision optimization methods. Learning-based optimization methods require extensive interaction with highly realistic microscopic traffic simulators for optimization. However, existing microscopic traffic simulators are computationally inefficient in large-scale scenarios and therefore significantly reduce the efficiency of the data sampling process of optimization algorithms. In addition, the optimization scenarios supported by existing simulators are limited, mainly focusing on the traffic signal control. To address these challenges and limitations, we propose the first open-source GPU-accelerated large-scale microscopic simulator for transportation system simulation. The simulator is able to iterate at 84.09Hz, which achieves 88.92 times computational acceleration in the large-scale scenario with more than a million vehicles compared to the best baseline. Based on the simulator, we implement a set of microscopic and macroscopic controllable objects and metrics to support most typical transportation system optimization scenarios. These controllable objects and metrics are all provided by Python API for ease of use. We choose five important and representative transportation system optimization scenarios and benchmark classical rule-based algorithms, reinforcement learning, and black-box optimization in four cities. The codes are available at url{https://github.com/tsinghua-fib-lab/moss-benchmark} with the MIT License.
6/18/2024

LPSim: Large Scale Multi-GPU Parallel Computing based Regional Scale Traffic Simulation Framework
Xuan Jiang, Raja Sengupta, James Demmel, Samuel Williams
0
0
Traffic propagation simulation is crucial for urban planning, enabling congestion analysis, travel time estimation, and route optimization. Traditional micro-simulation frameworks are limited to main roads due to the complexity of urban mobility and large-scale data. We introduce the Large Scale Multi-GPU Parallel Computing based Regional Scale Traffic Simulation Framework (LPSim), a scalable tool that leverages GPU parallel computing to simulate extensive traffic networks with high fidelity and reduced computation time. LPSim performs millions of vehicle dynamics simulations simultaneously, outperforming CPU-based methods. It can complete simulations of 2.82 million trips in 6.28 minutes using a single GPU, and 9.01 million trips in 21.16 minutes on dual GPUs. LPSim is also tested on dual NVIDIA A100 GPUs, achieving simulations about 113 times faster than traditional CPU methods. This demonstrates its scalability and efficiency for large-scale applications, making LPSim a valuable resource for researchers and planners. Code: https://github.com/Xuan-1998/LPSim
6/14/2024

LLM-Assisted Light: Leveraging Large Language Model Capabilities for Human-Mimetic Traffic Signal Control in Complex Urban Environments
Maonan Wang, Aoyu Pang, Yuheng Kan, Man-On Pun, Chung Shue Chen, Bo Huang
0
0
Traffic congestion in metropolitan areas presents a formidable challenge with far-reaching economic, environmental, and societal ramifications. Therefore, effective congestion management is imperative, with traffic signal control (TSC) systems being pivotal in this endeavor. Conventional TSC systems, designed upon rule-based algorithms or reinforcement learning (RL), frequently exhibit deficiencies in managing the complexities and variabilities of urban traffic flows, constrained by their limited capacity for adaptation to unfamiliar scenarios. In response to these limitations, this work introduces an innovative approach that integrates Large Language Models (LLMs) into TSC, harnessing their advanced reasoning and decision-making faculties. Specifically, a hybrid framework that augments LLMs with a suite of perception and decision-making tools is proposed, facilitating the interrogation of both the static and dynamic traffic information. This design places the LLM at the center of the decision-making process, combining external traffic data with established TSC methods. Moreover, a simulation platform is developed to corroborate the efficacy of the proposed framework. The findings from our simulations attest to the system's adeptness in adjusting to a multiplicity of traffic environments without the need for additional training. Notably, in cases of Sensor Outage (SO), our approach surpasses conventional RL-based systems by reducing the average waiting time by $20.4%$. This research signifies a notable advance in TSC strategies and paves the way for the integration of LLMs into real-world, dynamic scenarios, highlighting their potential to revolutionize traffic management. The related code is available at https://github.com/Traffic-Alpha/LLM-Assisted-Light.
6/13/2024