Learning an Actionable Discrete Diffusion Policy via Large-Scale Actionless Video Pre-Training

0

Sign in to get full access
Overview
- The paper introduces a novel approach for large-scale actionless video pre-training using discrete diffusion models, which enables efficient policy learning in downstream robotics tasks.
- The method leverages the power of video data to learn rich visual representations without the need for action annotations, addressing the scalability and annotation challenges in robotics.
- The proposed framework, called [object Object], shows promising results in improving sample efficiency and performance in challenging robotic manipulation tasks.
Plain English Explanation
[object Object] is a new technique that aims to make it easier for robots to learn how to perform tasks. Traditionally, robots need to be shown many examples of the actions they should take to complete a task, which can be time-consuming and expensive to collect.
The key insight of DDPL is that robots can learn useful skills just by watching videos of people or other robots performing tasks, without needing to know the specific actions taken. The model learns to extract meaningful visual patterns and representations from the videos, which can then be leveraged to improve the robot's own task performance.
This approach is particularly helpful for robotics, where obtaining large, high-quality datasets of robot actions can be challenging. By using readily available video data, DDPL can learn powerful models that boost the robot's sample efficiency and overall performance on downstream tasks, without the need for extensive action-level supervision.
Technical Explanation
The [object Object] framework consists of two main components:
-
Actionless Video Pre-Training: The model is first pre-trained on a large corpus of unlabeled video data using a discrete diffusion generative model. This allows the model to learn rich visual representations from the video data without requiring any annotations about the actions being performed.
-
Efficient Policy Learning: The pre-trained visual representations are then fine-tuned for specific robotic manipulation tasks, significantly improving the sample efficiency and performance of the learned policies compared to training from scratch.
The key technical innovation is the use of a [object Object] to perform the actionless pre-training. Diffusion models are a type of generative model that can learn to synthesize new data by gradually adding noise to the input and then learning to reverse the process.
By using a discrete version of the diffusion model, the authors are able to capture the multi-modal and fine-grained structure of the video data more effectively, leading to better learned representations that can be leveraged for efficient policy learning.
The paper demonstrates the effectiveness of DDPL on several challenging robotic manipulation tasks, showing significant improvements in sample efficiency and task performance compared to alternative pre-training approaches.
Critical Analysis
The authors acknowledge several limitations and areas for further research:
-
The current implementation of DDPL is focused on vision-based robotic manipulation tasks, and it remains to be seen how well the approach would generalize to other robotics domains, such as navigation or multi-agent coordination.
-
The paper does not provide a detailed analysis of the learned representations and how they capture the underlying structure of the video data. Further investigation into the interpretability and transferability of these representations would be valuable.
-
The reliance on large-scale video datasets for pre-training could be a practical challenge, as collecting and curating such datasets can be time-consuming and expensive. Exploring ways to leverage smaller or more diverse datasets would be an interesting direction for future work.
Additionally, one could argue that the benefits of DDPL, while significant, may be limited to specific settings where obtaining high-quality action-level supervision is particularly challenging. In cases where such supervision is readily available, more traditional supervised learning approaches may still be more effective.
Overall, the [object Object] technique represents an important step towards more scalable and efficient policy learning in robotics, and the ideas presented in this paper are likely to inspire further research in this direction.
Conclusion
The [object Object] framework introduces a novel approach for large-scale actionless video pre-training using discrete diffusion models. This method addresses the scalability and annotation challenges in robotics by leveraging readily available video data to learn powerful visual representations that can significantly improve the sample efficiency and performance of learned policies in downstream tasks.
The key technical contributions, including the use of discrete diffusion models and the efficient policy learning pipeline, demonstrate the potential of this approach to advance the field of robotic manipulation and control. While the current implementation has some limitations, the ideas presented in this paper are likely to inspire further research and development in this promising direction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Learning an Actionable Discrete Diffusion Policy via Large-Scale Actionless Video Pre-Training
Haoran He, Chenjia Bai, Ling Pan, Weinan Zhang, Bin Zhao, Xuelong Li
Learning a generalist embodied agent capable of completing multiple tasks poses challenges, primarily stemming from the scarcity of action-labeled robotic datasets. In contrast, a vast amount of human videos exist, capturing intricate tasks and interactions with the physical world. Promising prospects arise for utilizing actionless human videos for pre-training and transferring the knowledge to facilitate robot policy learning through limited robot demonstrations. However, it remains a challenge due to the domain gap between humans and robots. Moreover, it is difficult to extract useful information representing the dynamic world from human videos, because of its noisy and multimodal data structure. In this paper, we introduce a novel framework to tackle these challenges, which leverages a unified discrete diffusion to combine generative pre-training on human videos and policy fine-tuning on a small number of action-labeled robot videos. We start by compressing both human and robot videos into unified video tokens. In the pre-training stage, we employ a discrete diffusion model with a mask-and-replace diffusion strategy to predict future video tokens in the latent space. In the fine-tuning stage, we harness the imagined future videos to guide low-level action learning with a limited set of robot data. Experiments demonstrate that our method generates high-fidelity future videos for planning and enhances the fine-tuned policies compared to previous state-of-the-art approaches with superior performance. Our project website is available at https://video-diff.github.io/.
Read more10/4/2024
0
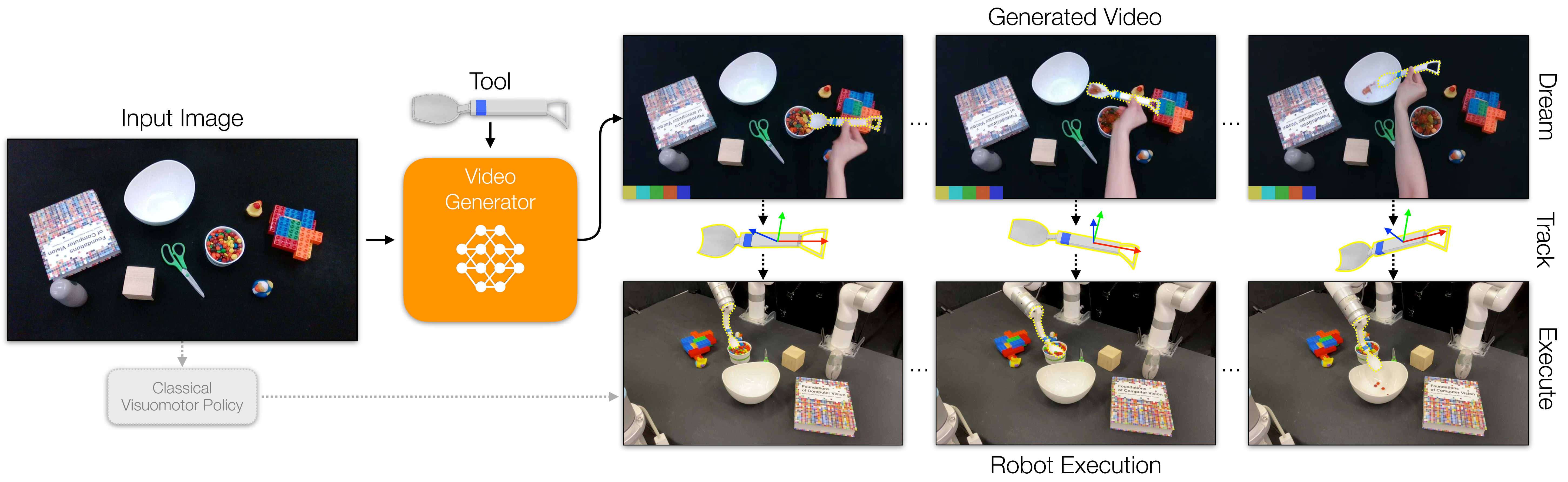
Dreamitate: Real-World Visuomotor Policy Learning via Video Generation
Junbang Liang, Ruoshi Liu, Ege Ozguroglu, Sruthi Sudhakar, Achal Dave, Pavel Tokmakov, Shuran Song, Carl Vondrick
A key challenge in manipulation is learning a policy that can robustly generalize to diverse visual environments. A promising mechanism for learning robust policies is to leverage video generative models, which are pretrained on large-scale datasets of internet videos. In this paper, we propose a visuomotor policy learning framework that fine-tunes a video diffusion model on human demonstrations of a given task. At test time, we generate an example of an execution of the task conditioned on images of a novel scene, and use this synthesized execution directly to control the robot. Our key insight is that using common tools allows us to effortlessly bridge the embodiment gap between the human hand and the robot manipulator. We evaluate our approach on four tasks of increasing complexity and demonstrate that harnessing internet-scale generative models allows the learned policy to achieve a significantly higher degree of generalization than existing behavior cloning approaches.
Read more6/26/2024
👁️
0
Discrete Policy: Learning Disentangled Action Space for Multi-Task Robotic Manipulation
Kun Wu, Yichen Zhu, Jinming Li, Junjie Wen, Ning Liu, Zhiyuan Xu, Qinru Qiu, Jian Tang
Learning visuomotor policy for multi-task robotic manipulation has been a long-standing challenge for the robotics community. The difficulty lies in the diversity of action space: typically, a goal can be accomplished in multiple ways, resulting in a multimodal action distribution for a single task. The complexity of action distribution escalates as the number of tasks increases. In this work, we propose textbf{Discrete Policy}, a robot learning method for training universal agents capable of multi-task manipulation skills. Discrete Policy employs vector quantization to map action sequences into a discrete latent space, facilitating the learning of task-specific codes. These codes are then reconstructed into the action space conditioned on observations and language instruction. We evaluate our method on both simulation and multiple real-world embodiments, including both single-arm and bimanual robot settings. We demonstrate that our proposed Discrete Policy outperforms a well-established Diffusion Policy baseline and many state-of-the-art approaches, including ACT, Octo, and OpenVLA. For example, in a real-world multi-task training setting with five tasks, Discrete Policy achieves an average success rate that is 26% higher than Diffusion Policy and 15% higher than OpenVLA. As the number of tasks increases to 12, the performance gap between Discrete Policy and Diffusion Policy widens to 32.5%, further showcasing the advantages of our approach. Our work empirically demonstrates that learning multi-task policies within the latent space is a vital step toward achieving general-purpose agents.
Read more9/30/2024

0
Mitigating the Human-Robot Domain Discrepancy in Visual Pre-training for Robotic Manipulation
Jiaming Zhou, Teli Ma, Kun-Yu Lin, Ronghe Qiu, Zifan Wang, Junwei Liang
Learning generalizable visual dynamic representation across different embodied environments is crucial for real-world robotic manipulation. As the scale and diversity of robot demonstration data are limited, recent works have turned to large-scale pre-training using human data. However, the morphological differences between humans and robots introduce a significant human-robot domain discrepancy, challenging the generalization of these human-data pre-trained models to downstream manipulation tasks. To address this, we propose a novel adaptation paradigm that utilizes readily available paired human-robot video data to bridge the discrepancy. Following this paradigm, our method exploits a human-robot contrastive alignment loss to align the semantics of human and robot videos, adapting pre-trained models to the robotic domain in a parameter-efficient manner. The experiments demonstrate significant improvements on 25 tasks across three different benchmarks, where the single-task, language-conditioned multi-task settings are covered, and two different pre-trained models are evaluated. On the large RLBench benchmark, our adaptation method achieves an average improvement of $8.9%$ in success rate over the pre-trained R3M model across multiple tasks. We will release the code and models upon acceptance.
Read more6/21/2024