Learning Coordinated Maneuver in Adversarial Environments

0

Sign in to get full access
Overview
- This paper explores how multiple autonomous agents can learn to coordinate their movements in adversarial environments where they may encounter obstacles or opponents.
- The researchers developed a novel deep reinforcement learning algorithm that allows agents to adapt their behaviors and maneuvers in real-time to navigate challenging scenarios.
- Key innovations include the use of attention mechanisms to capture cross-agent interactions and reward shaping to encourage coordinated behaviors.
- The proposed approach is evaluated through simulations of complex, multi-agent environments and demonstrates significant improvements over baseline methods.
Plain English Explanation
In this research, the authors looked at how a group of autonomous agents, like robots or drones, can learn to work together effectively in challenging environments where they may face obstacles or even adversaries. They developed a new machine learning algorithm that allows these agents to adapt their movements and strategies in real-time to navigate these tricky situations.
The key innovation is the use of attention mechanisms, which help the agents pay attention to how the other agents around them are moving and behaving. This allows them to coordinate their actions and maneuvers better as a team. The researchers also designed the algorithm to reward the agents when they work together, encouraging them to learn collaborative behaviors.
Through computer simulations of complex, multi-agent scenarios, the authors showed that their approach significantly outperformed other methods. This suggests this technique could be very useful for applications like <a href="https://aimodels.fyi/papers/arxiv/multi-robot-collaborative-navigation-formation-adaptation">multi-robot navigation</a>, <a href="https://aimodels.fyi/papers/arxiv/distributed-multi-vehicle-coordination-algorithm-navigation-tight">coordinated drone flights</a>, or even <a href="https://aimodels.fyi/papers/arxiv/traversing-mars-cooperative-informative-path-planning-to">exploration of Mars</a> - any situation where a team of autonomous agents needs to work together effectively in challenging environments.
Technical Explanation
The core of the researchers' approach is a novel deep reinforcement learning algorithm that allows a team of agents to learn coordinated behaviors for navigating adversarial environments. The key innovations include:
-
Attention Mechanisms: The agents use attention layers to capture cross-agent interactions, allowing them to adapt their individual behaviors based on the movements and actions of their teammates.
-
Reward Shaping: The reward function is carefully designed to encourage the agents to work together, rewarding coordinated maneuvers and penalizing selfish or uncooperative behaviors.
-
Decentralized Training: The training process is decentralized, with each agent learning its own policy independently. This makes the approach scalable and applicable to a wide range of multi-agent scenarios.
The proposed algorithm is evaluated through extensive simulations of complex environments, including <a href="https://aimodels.fyi/papers/arxiv/n-agent-ad-hoc-teamwork">ad-hoc team formation</a> and <a href="https://aimodels.fyi/papers/arxiv/dream-decentralized-real-time-asynchronous-probabilistic-trajectory">dynamic obstacle avoidance</a> tasks. The results demonstrate significant performance improvements over baseline methods, highlighting the effectiveness of the attention mechanisms and reward shaping in fostering coordinated behaviors among the agents.
Critical Analysis
The research presented in this paper is a valuable contribution to the field of multi-agent systems and reinforcement learning. The authors' approach of using attention mechanisms and reward shaping to enable coordinated behaviors is a promising direction that could have significant implications for a wide range of real-world applications.
However, it's important to note that the evaluation is primarily based on simulated environments, and the authors acknowledge the need for further validation in real-world settings. Additionally, the scalability of the approach to larger teams of agents or more complex environments may require additional research and development.
Another potential limitation is the reliance on a decentralized training process, which, while advantageous for scalability, may not capture all the nuances of real-world team dynamics and communication. Exploring hybrid approaches that combine decentralized and centralized elements could be an interesting area for future work.
Conclusion
This paper presents a novel deep reinforcement learning algorithm that enables a team of autonomous agents to learn coordinated maneuvers in adversarial environments. By incorporating attention mechanisms and reward shaping, the agents are able to adapt their behaviors in real-time to navigate challenging scenarios effectively.
The promising results demonstrated through extensive simulations suggest that this approach could have significant practical applications, from <a href="https://aimodels.fyi/papers/arxiv/multi-robot-collaborative-navigation-formation-adaptation">multi-robot collaboration</a> and <a href="https://aimodels.fyi/papers/arxiv/distributed-multi-vehicle-coordination-algorithm-navigation-tight">drone coordination</a> to <a href="https://aimodels.fyi/papers/arxiv/traversing-mars-cooperative-informative-path-planning-to">planetary exploration</a>. Further research and validation in real-world settings will be crucial to fully understand the capabilities and limitations of this technique and to unlock its full potential.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning Coordinated Maneuver in Adversarial Environments
Zechen Hu, Manshi Limbu, Daigo Shishika, Xuesu Xiao, Xuan Wang
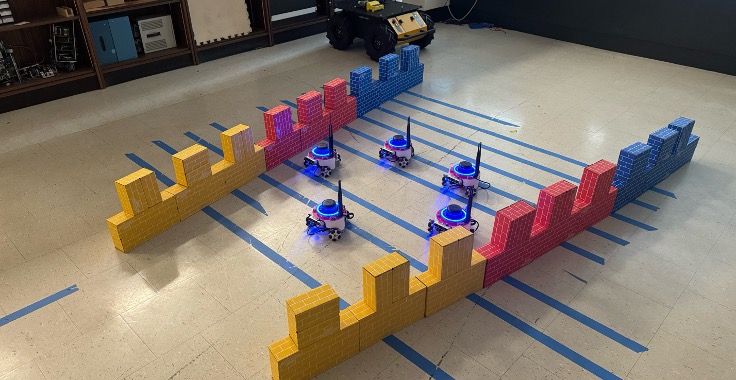
This paper aims to solve the coordination of a team of robots traversing a route in the presence of adversaries with random positions. Our goal is to minimize the overall cost of the team, which is determined by (i) the accumulated risk when robots stay in adversary-impacted zones and (ii) the mission completion time. During traversal, robots can reduce their speed and act as a `guard' (the slower, the better), which will decrease the risks certain adversary incurs. This leads to a trade-off between the robots' guarding behaviors and their travel speeds. The formulated problem is highly non-convex and cannot be efficiently solved by existing algorithms. Our approach includes a theoretical analysis of the robots' behaviors for the single-adversary case. As the scale of the problem expands, solving the optimal solution using optimization approaches is challenging, therefore, we employ reinforcement learning techniques by developing new encoding and policy-generating methods. Simulations demonstrate that our learning methods can efficiently produce team coordination behaviors. We discuss the reasoning behind these behaviors and explain why they reduce the overall team cost.
Read more8/22/2024

0
Multi-Robot Coordination Induced in Hazardous Environments through an Adversarial Graph-Traversal Game
James Berneburg, Xuan Wang, Xuesu Xiao, Daigo Shishika
This paper presents a game theoretic formulation of a graph traversal problem, with applications to robots moving through hazardous environments in the presence of an adversary, as in military and security applications. The blue team of robots moves in an environment modeled by a time-varying graph, attempting to reach some goal with minimum cost, while the red team controls how the graph changes to maximize the cost. The problem is formulated as a stochastic game, so that Nash equilibrium strategies can be computed numerically. Bounds are provided for the game value, with a guarantee that it solves the original problem. Numerical simulations demonstrate the results and the effectiveness of this method, particularly showing the benefit of mixing actions for both players, as well as beneficial coordinated behavior, where blue robots split up and/or synchronize to traverse risky edges.
Read more9/14/2024
0
Multi-Robot Collaborative Navigation with Formation Adaptation
Zihao Deng, Peng Gao, Williard Joshua Jose, Hao Zhang
Multi-robot collaborative navigation is an essential ability where teamwork and synchronization are keys. In complex and uncertain environments, adaptive formation is vital, as rigid formations prove to be inadequate. The ability of robots to dynamically adjust their formation enables navigation through unpredictable spaces, maintaining cohesion, and effectively responding to environmental challenges. In this paper, we introduce a novel approach that uses bi-level learning framework. Specifically, we use graph learning at a high level for group coordination and reinforcement learning for individual navigation. We innovate by integrating a spring-damper model within the reinforcement learning reward mechanism, addressing the rigidity of traditional formation control methods. During execution, our approach enables a team of robots to successfully navigate challenging environments, maintain a desired formation shape, and dynamically adjust their formation scale based on environmental information. We conduct extensive experiments to evaluate our approach across three distinct formation scenarios in multi-robot navigation: circle, line, and wedge. Experimental results show that our approach achieves promising results and scalability on multi-robot navigation with formation adaptation.
Read more4/3/2024

0
New!Resilient and Adaptive Replanning for Multi-Robot Target Tracking with Sensing and Communication Danger Zones
Peihan Li, Yuwei Wu, Jiazhen Liu, Gaurav S. Sukhatme, Vijay Kumar, Lifeng Zhou
Multi-robot collaboration for target tracking presents significant challenges in hazardous environments, including addressing robot failures, dynamic priority changes, and other unpredictable factors. Moreover, these challenges are increased in adversarial settings if the environment is unknown. In this paper, we propose a resilient and adaptive framework for multi-robot, multi-target tracking in environments with unknown sensing and communication danger zones. The damages posed by these zones are temporary, allowing robots to track targets while accepting the risk of entering dangerous areas. We formulate the problem as an optimization with soft chance constraints, enabling real-time adjustments to robot behavior based on varying types of dangers and failures. An adaptive replanning strategy is introduced, featuring different triggers to improve group performance. This approach allows for dynamic prioritization of target tracking and risk aversion or resilience, depending on evolving resources and real-time conditions. To validate the effectiveness of the proposed method, we benchmark and evaluate it across multiple scenarios in simulation and conduct several real-world experiments.
Read more9/18/2024