Learning High-Quality Navigation and Zooming on Omnidirectional Images in Virtual Reality

0
Sign in to get full access
Overview
- This paper presents a novel technique for enabling high-quality navigation and zooming on omnidirectional images in virtual reality (VR) environments.
- The method leverages deep learning models to enable seamless and natural interactions with 360-degree panoramic images, improving upon previous approaches.
- The researchers demonstrate the effectiveness of their technique through user studies and quantitative evaluations.
Plain English Explanation
In virtual reality (VR), users often need to explore and interact with 360-degree panoramic images that capture a full, spherical view of a scene. This is known as working with "omnidirectional" images. However, navigating and zooming within these images can be challenging, as traditional methods can feel clunky or unnatural.
The researchers in this paper have developed a new approach to make interacting with omnidirectional images in VR much smoother and more intuitive. They use advanced deep learning models to enable high-quality navigation and zooming that feels natural and responsive to the user.
For example, when a user wants to pan around an image or zoom in on a specific area, the deep learning models can predict how the user is likely to interact next and preemptively render the appropriate content. This reduces latency and creates a more seamless experience.
The researchers tested their technique with human users and found that it outperformed previous methods in terms of usability, responsiveness, and overall quality of the VR experience. This represents an important advancement that could benefit a wide range of VR applications, from virtual tourism to remote collaboration.
Technical Explanation
The key technical innovation in this paper is the use of deep learning models to enable high-quality navigation and zooming on omnidirectional images in VR.
The researchers developed a deep neural network architecture that can predict a user's future interactions, such as the direction and speed of panning or the degree of zooming. By anticipating these actions, the system can preemptively render the appropriate content, reducing latency and creating a more responsive experience.
To train the models, the researchers collected large datasets of user interactions with omnidirectional images in VR. They then used this data to fine-tune state-of-the-art computer vision models, such as those used for ResvR, OmniSSR, and 360VoTS.
Through extensive user studies and quantitative evaluations, the researchers demonstrate that their deep learning-based approach significantly outperforms previous methods for navigating and zooming on omnidirectional images in VR. The system is more responsive, intuitive, and provides a higher overall quality of experience for users.
Critical Analysis
The researchers acknowledge several limitations and areas for further research in their paper. For example, they note that their models are currently trained on a finite dataset of user interactions, and it's unclear how well the models would generalize to users with different behaviors or preferences.
Additionally, the paper does not explore the potential for using reinforcement learning or other advanced techniques to further improve the models' ability to anticipate user actions. There may also be opportunities to incorporate additional sensory inputs, such as eye-tracking data, to enhance the models' predictive capabilities.
While the results are promising, it's important to note that the evaluation was conducted in a controlled laboratory setting. Further research is needed to understand how the system would perform in real-world VR applications, where users may be navigating more complex environments or multitasking.
Overall, this paper represents an important step forward in improving the user experience for omnidirectional image exploration in VR. The deep learning-based approach demonstrated here could have significant implications for a wide range of VR applications, from virtual tourism to remote collaboration. However, there are still opportunities for further refinement and real-world validation of the techniques.
Conclusion
This paper presents a novel deep learning-based approach for enabling high-quality navigation and zooming on omnidirectional images in virtual reality. By using advanced models to predict user actions and preemptively render content, the system provides a more seamless and responsive VR experience.
The researchers' findings demonstrate the effectiveness of this approach, which outperformed previous methods in user studies and quantitative evaluations. This work represents an important advancement that could have significant implications for a wide range of VR applications, from virtual tourism to remote collaboration.
While the paper identifies some limitations and areas for further research, the deep learning-based techniques showcased here have the potential to significantly improve the way users interact with 360-degree panoramic content in immersive VR environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning High-Quality Navigation and Zooming on Omnidirectional Images in Virtual Reality
Zidong Cao, Zhan Wang, Yexin Liu, Yan-Pei Cao, Ying Shan, Wei Zeng, Lin Wang
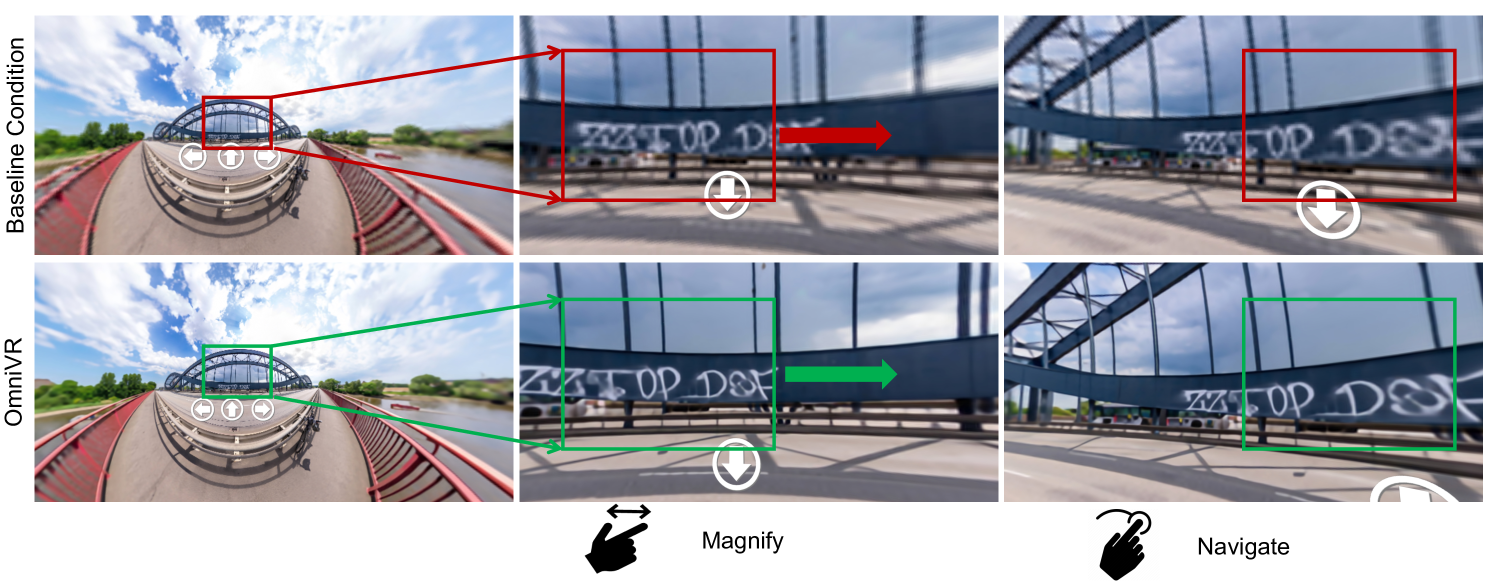
Viewing omnidirectional images (ODIs) in virtual reality (VR) represents a novel form of media that provides immersive experiences for users to navigate and interact with digital content. Nonetheless, this sense of immersion can be greatly compromised by a blur effect that masks details and hampers the user's ability to engage with objects of interest. In this paper, we present a novel system, called OmniVR, designed to enhance visual clarity during VR navigation. Our system enables users to effortlessly locate and zoom in on the objects of interest in VR. It captures user commands for navigation and zoom, converting these inputs into parameters for the Mobius transformation matrix. Leveraging these parameters, the ODI is refined using a learning-based algorithm. The resultant ODI is presented within the VR media, effectively reducing blur and increasing user engagement. To verify the effectiveness of our system, we first evaluate our algorithm with state-of-the-art methods on public datasets, which achieves the best performance. Furthermore, we undertake a comprehensive user study to evaluate viewer experiences across diverse scenarios and to gather their qualitative feedback from multiple perspectives. The outcomes reveal that our system enhances user engagement by improving the viewers' recognition, reducing discomfort, and improving the overall immersive experience. Our system makes the navigation and zoom more user-friendly.
Read more5/2/2024
🔗
0
ResVR: Joint Rescaling and Viewport Rendering of Omnidirectional Images
Weiqi Li, Shijie Zhao, Bin Chen, Xinhua Cheng, Junlin Li, Li Zhang, Jian Zhang
With the advent of virtual reality technology, omnidirectional image (ODI) rescaling techniques are increasingly embraced for reducing transmitted and stored file sizes while preserving high image quality. Despite this progress, current ODI rescaling methods predominantly focus on enhancing the quality of images in equirectangular projection (ERP) format, which overlooks the fact that the content viewed on head mounted displays (HMDs) is actually a rendered viewport instead of an ERP image. In this work, we emphasize that focusing solely on ERP quality results in inferior viewport visual experiences for users. Thus, we propose ResVR, which is the first comprehensive framework for the joint Rescaling and Viewport Rendering of ODIs. ResVR allows obtaining LR ERP images for transmission while rendering high-quality viewports for users to watch on HMDs. In our ResVR, a novel discrete pixel sampling strategy is developed to tackle the complex mapping between the viewport and ERP, enabling end-to-end training of ResVR pipeline. Furthermore, a spherical pixel shape representation technique is innovatively derived from spherical differentiation to significantly improve the visual quality of rendered viewports. Extensive experiments demonstrate that our ResVR outperforms existing methods in viewport rendering tasks across different fields of view, resolutions, and view directions while keeping a low transmission overhead.
Read more4/26/2024

0
Real-time Multi-view Omnidirectional Depth Estimation System for Robots and Autonomous Driving on Real Scenes
Ming Li, Xiong Yang, Chaofan Wu, Jiaheng Li, Pinzhi Wang, Xuejiao Hu, Sidan Du, Yang Li
Omnidirectional Depth Estimation has broad application prospects in fields such as robotic navigation and autonomous driving. In this paper, we propose a robotic prototype system and corresponding algorithm designed to validate omnidirectional depth estimation for navigation and obstacle avoidance in real-world scenarios for both robots and vehicles. The proposed HexaMODE system captures 360$^circ$ depth maps using six surrounding arranged fisheye cameras. We introduce a combined spherical sweeping method and optimize the model architecture for proposed RtHexa-OmniMVS algorithm to achieve real-time omnidirectional depth estimation. To ensure high accuracy, robustness, and generalization in real-world environments, we employ a teacher-student self-training strategy, utilizing large-scale unlabeled real-world data for model training. The proposed algorithm demonstrates high accuracy in various complex real-world scenarios, both indoors and outdoors, achieving an inference speed of 15 fps on edge computing platforms.
Read more9/14/2024

0
New!Panoramic Direct LiDAR-assisted Visual Odometry
Zikang Yuan, Tianle Xu, Xiaoxiang Wang, Jinni Geng, Xin Yang
Enhancing visual odometry by exploiting sparse depth measurements from LiDAR is a promising solution for improving tracking accuracy of an odometry. Most existing works utilize a monocular pinhole camera, yet could suffer from poor robustness due to less available information from limited field-of-view (FOV). This paper proposes a panoramic direct LiDAR-assisted visual odometry, which fully associates the 360-degree FOV LiDAR points with the 360-degree FOV panoramic image datas. 360-degree FOV panoramic images can provide more available information, which can compensate inaccurate pose estimation caused by insufficient texture or motion blur from a single view. In addition to constraints between a specific view at different times, constraints can also be built between different views at the same moment. Experimental results on public datasets demonstrate the benefit of large FOV of our panoramic direct LiDAR-assisted visual odometry to state-of-the-art approaches.
Read more9/17/2024