Real-time Multi-view Omnidirectional Depth Estimation System for Robots and Autonomous Driving on Real Scenes

0

Sign in to get full access
Overview
- This research paper presents a real-time multi-view omnidirectional depth estimation system for robots and autonomous driving applications.
- The system uses multiple cameras to capture a 360-degree view of the environment and generates a depth map in real-time.
- The depth information is crucial for tasks like obstacle avoidance, navigation, and scene understanding in robotic and autonomous driving scenarios.
Plain English Explanation
The research paper describes a system that can quickly and accurately measure the distance of objects in a robot's or autonomous vehicle's surrounding environment. This is done by using multiple cameras that can see in all directions, creating a 360-degree view. The cameras work together to generate a detailed map showing how far away different things are in the scene.
This depth information is essential for robots and self-driving cars to safely navigate their surroundings. It allows them to detect obstacles, plan routes, and understand the layout of the environment. By having a real-time, omnidirectional depth map, the system can support critical tasks like avoiding collisions, finding the best path to travel, and interpreting the world around the robot or vehicle.
Technical Explanation
The key elements of the real-time multi-view omnidirectional depth estimation system described in the paper include:
-
Omnidirectional Camera Setup: The system uses multiple cameras arranged in an omnidirectional configuration to capture a 360-degree view of the environment.
-
Depth Estimation Network: The system employs a deep learning-based depth estimation network that can process the multi-view camera inputs and generate a dense depth map in real-time.
-
Real-Time Performance: The researchers optimized the system for low-latency, high-fps performance, allowing it to operate in real-time for robotics and autonomous driving applications.
-
Evaluation on Real-World Scenes: The system was tested on various real-world outdoor scenes, demonstrating its ability to accurately estimate depth in complex, uncontrolled environments.
Critical Analysis
The paper acknowledges some limitations of the proposed system, such as the need for careful camera calibration and the potential impact of environmental conditions like lighting and weather on depth estimation accuracy. Additionally, the researchers note that further improvements in network architecture and training data could enhance the system's performance.
While the real-time, omnidirectional depth estimation capabilities are impressive, the paper does not provide a direct comparison to alternative depth sensing technologies, such as LiDAR or stereo vision. This comparison could help readers better understand the trade-offs and relative strengths of the proposed approach.
Overall, the research presents a valuable contribution to the field of robotic and autonomous vehicle perception, offering a practical solution for real-time depth estimation in complex, 360-degree environments. Further research and development in this area could lead to significant advancements in tasks like obstacle avoidance, navigation, and scene understanding for a wide range of robotics and autonomous driving applications.
Conclusion
The real-time multi-view omnidirectional depth estimation system described in this paper represents an important step forward in the field of robotic and autonomous vehicle perception. By leveraging multiple cameras to capture a 360-degree view and a deep learning-based depth estimation network, the system can provide crucial depth information to support critical tasks like obstacle avoidance, navigation, and scene understanding.
While the paper highlights some limitations and areas for further improvement, the overall approach demonstrates the potential of this technology to enhance the capabilities of robots and autonomous vehicles operating in complex, real-world environments. As the field of computer vision and deep learning continues to advance, we can expect to see even more sophisticated and capable depth estimation systems emerge, further improving the safety and performance of these autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Real-time Multi-view Omnidirectional Depth Estimation System for Robots and Autonomous Driving on Real Scenes
Ming Li, Xiong Yang, Chaofan Wu, Jiaheng Li, Pinzhi Wang, Xuejiao Hu, Sidan Du, Yang Li
Omnidirectional Depth Estimation has broad application prospects in fields such as robotic navigation and autonomous driving. In this paper, we propose a robotic prototype system and corresponding algorithm designed to validate omnidirectional depth estimation for navigation and obstacle avoidance in real-world scenarios for both robots and vehicles. The proposed HexaMODE system captures 360$^circ$ depth maps using six surrounding arranged fisheye cameras. We introduce a combined spherical sweeping method and optimize the model architecture for proposed RtHexa-OmniMVS algorithm to achieve real-time omnidirectional depth estimation. To ensure high accuracy, robustness, and generalization in real-world environments, we employ a teacher-student self-training strategy, utilizing large-scale unlabeled real-world data for model training. The proposed algorithm demonstrates high accuracy in various complex real-world scenarios, both indoors and outdoors, achieving an inference speed of 15 fps on edge computing platforms.
Read more9/14/2024
🤷
0
Real-time Monocular Depth Estimation on Embedded Systems
Cheng Feng, Congxuan Zhang, Zhen Chen, Weiming Hu, Liyue Ge
Depth sensing is of paramount importance for unmanned aerial and autonomous vehicles. Nonetheless, contemporary monocular depth estimation methods employing complex deep neural networks within Convolutional Neural Networks are inadequately expedient for real-time inference on embedded platforms. This paper endeavors to surmount this challenge by proposing two efficient and lightweight architectures, RT-MonoDepth and RT-MonoDepth-S, thereby mitigating computational complexity and latency. Our methodologies not only attain accuracy comparable to prior depth estimation methods but also yield faster inference speeds. Specifically, RT-MonoDepth and RT-MonoDepth-S achieve frame rates of 18.4&30.5 FPS on NVIDIA Jetson Nano and 253.0&364.1 FPS on Jetson AGX Orin, utilizing a single RGB image of resolution 640x192. The experimental results underscore the superior accuracy and faster inference speed of our methods in comparison to existing fast monocular depth estimation methodologies on the KITTI dataset.
Read more6/10/2024
0
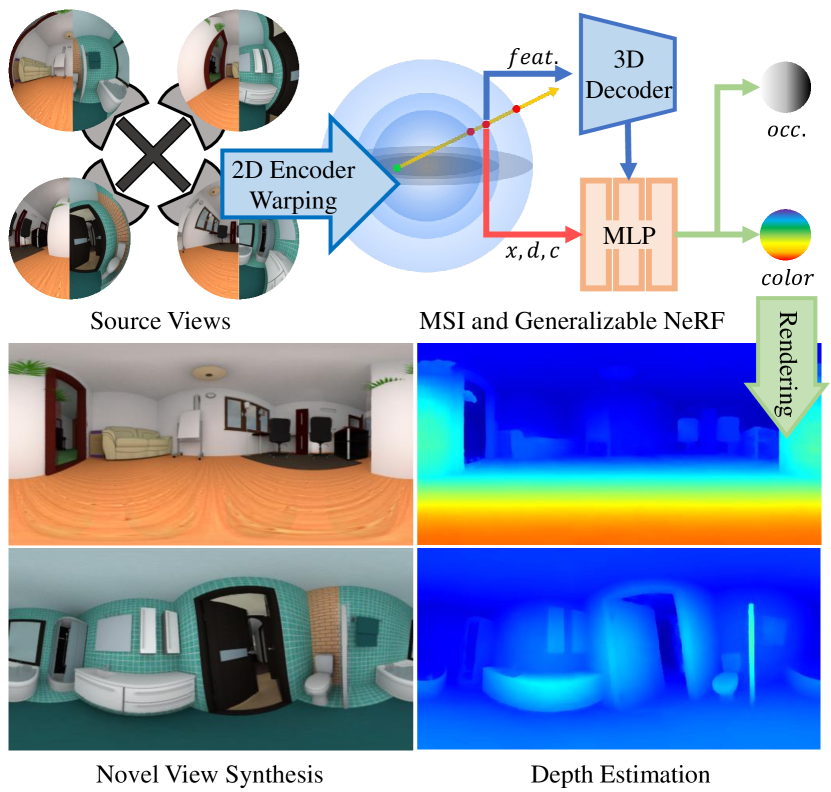
MSI-NeRF: Linking Omni-Depth with View Synthesis through Multi-Sphere Image aided Generalizable Neural Radiance Field
Dongyu Yan, Guanyu Huang, Fengyu Quan, Haoyao Chen
Panoramic observation using fisheye cameras is significant in virtual reality (VR) and robot perception. However, panoramic images synthesized by traditional methods lack depth information and can only provide three degrees-of-freedom (3DoF) rotation rendering in VR applications. To fully preserve and exploit the parallax information within the original fisheye cameras, we introduce MSI-NeRF, which combines deep learning omnidirectional depth estimation and novel view synthesis. We construct a multi-sphere image as a cost volume through feature extraction and warping of the input images. We further build an implicit radiance field using spatial points and interpolated 3D feature vectors as input, which can simultaneously realize omnidirectional depth estimation and 6DoF view synthesis. Leveraging the knowledge from depth estimation task, our method can learn scene appearance by source view supervision only. It does not require novel target views and can be trained conveniently on existing panorama depth estimation datasets. Our network has the generalization ability to reconstruct unknown scenes efficiently using only four images. Experimental results show that our method outperforms existing methods in both depth estimation and novel view synthesis tasks.
Read more7/23/2024
0
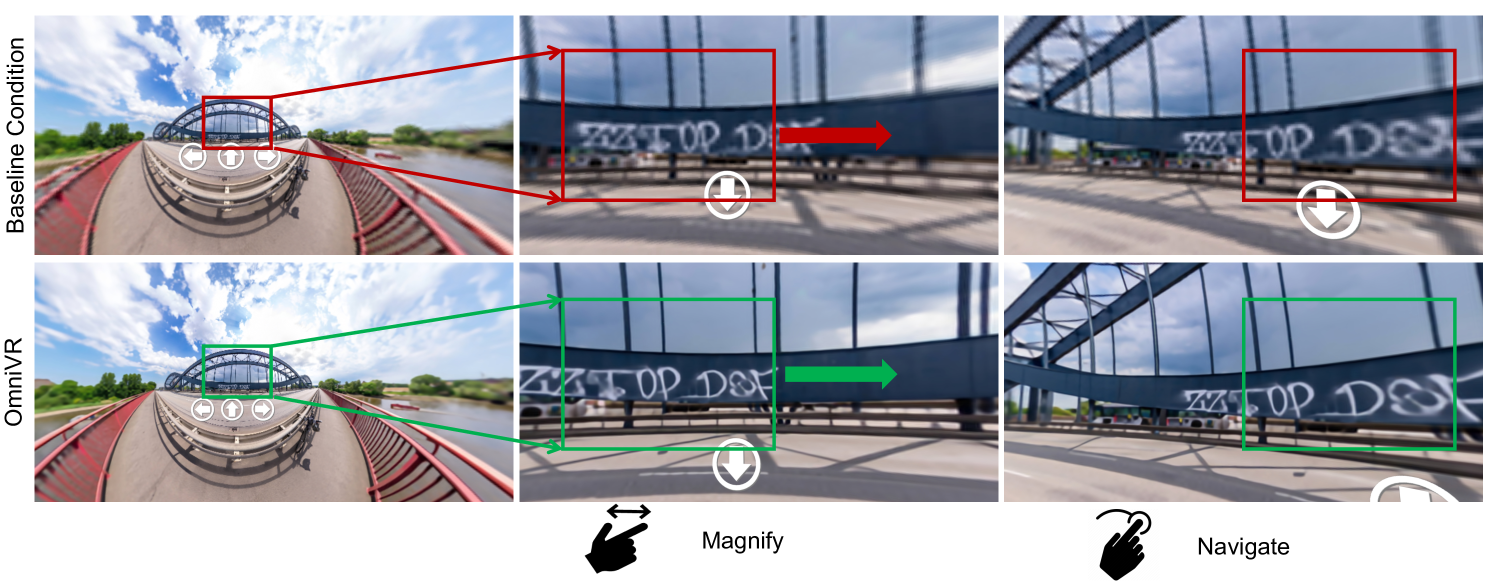
Learning High-Quality Navigation and Zooming on Omnidirectional Images in Virtual Reality
Zidong Cao, Zhan Wang, Yexin Liu, Yan-Pei Cao, Ying Shan, Wei Zeng, Lin Wang
Viewing omnidirectional images (ODIs) in virtual reality (VR) represents a novel form of media that provides immersive experiences for users to navigate and interact with digital content. Nonetheless, this sense of immersion can be greatly compromised by a blur effect that masks details and hampers the user's ability to engage with objects of interest. In this paper, we present a novel system, called OmniVR, designed to enhance visual clarity during VR navigation. Our system enables users to effortlessly locate and zoom in on the objects of interest in VR. It captures user commands for navigation and zoom, converting these inputs into parameters for the Mobius transformation matrix. Leveraging these parameters, the ODI is refined using a learning-based algorithm. The resultant ODI is presented within the VR media, effectively reducing blur and increasing user engagement. To verify the effectiveness of our system, we first evaluate our algorithm with state-of-the-art methods on public datasets, which achieves the best performance. Furthermore, we undertake a comprehensive user study to evaluate viewer experiences across diverse scenarios and to gather their qualitative feedback from multiple perspectives. The outcomes reveal that our system enhances user engagement by improving the viewers' recognition, reducing discomfort, and improving the overall immersive experience. Our system makes the navigation and zoom more user-friendly.
Read more5/2/2024