Learning Optimal Filters Using Variational Inference

0

Sign in to get full access
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning Optimal Filters Using Variational Inference
Enoch Luk, Eviatar Bach, Ricardo Baptista, Andrew Stuart
Filtering - the task of estimating the conditional distribution of states of a dynamical system given partial, noisy, observations - is important in many areas of science and engineering, including weather and climate prediction. However, the filtering distribution is generally intractable to obtain for high-dimensional, nonlinear systems. Filters used in practice, such as the ensemble Kalman filter (EnKF), are biased for nonlinear systems and have numerous tuning parameters. Here, we present a framework for learning a parameterized analysis map - the map that takes a forecast distribution and observations to the filtering distribution - using variational inference. We show that this methodology can be used to learn gain matrices for filtering linear and nonlinear dynamical systems, as well as inflation and localization parameters for an EnKF. Future work will apply this framework to learn new filtering algorithms.
Read more8/14/2024
0
A competitive baseline for deep learning enhanced data assimilation using conditional Gaussian ensemble Kalman filtering
Zachariah Malik, Romit Maulik
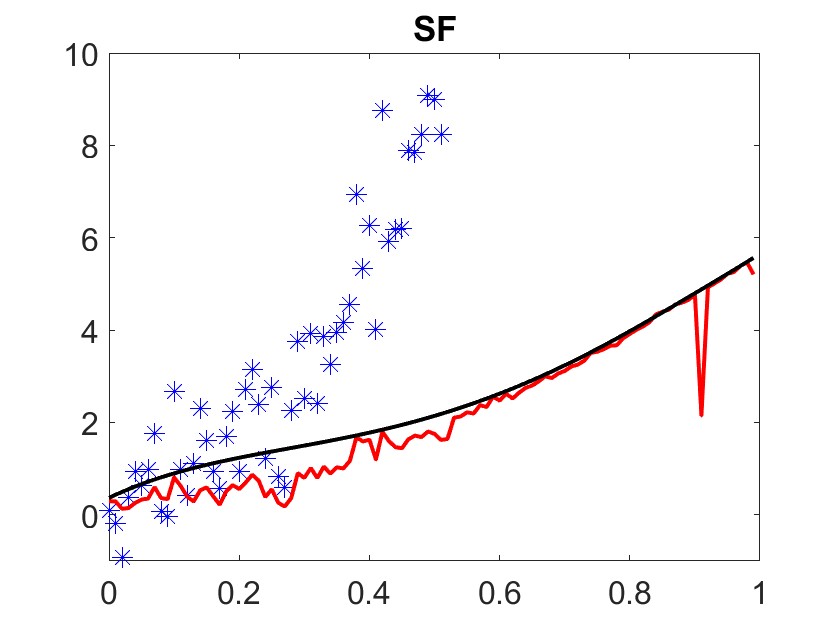
Ensemble Kalman Filtering (EnKF) is a popular technique for data assimilation, with far ranging applications. However, the vanilla EnKF framework is not well-defined when perturbations are nonlinear. We study two non-linear extensions of the vanilla EnKF - dubbed the conditional-Gaussian EnKF (CG-EnKF) and the normal score EnKF (NS-EnKF) - which sidestep assumptions of linearity by constructing the Kalman gain matrix with the `conditional Gaussian' update formula in place of the traditional one. We then compare these models against a state-of-the-art deep learning based particle filter called the score filter (SF). This model uses an expensive score diffusion model for estimating densities and also requires a strong assumption on the perturbation operator for validity. In our comparison, we find that CG-EnKF and NS-EnKF dramatically outperform SF for a canonical problem in high-dimensional multiscale data assimilation given by the Lorenz-96 system. Our analysis also demonstrates that the CG-EnKF and NS-EnKF can handle highly non-Gaussian additive noise perturbations, with the latter typically outperforming the former.
Read more9/24/2024

0
Ensemble Kalman Filtering Meets Gaussian Process SSM for Non-Mean-Field and Online Inference
Zhidi Lin, Yiyong Sun, Feng Yin, Alexandre Hoang Thi'ery
The Gaussian process state-space models (GPSSMs) represent a versatile class of data-driven nonlinear dynamical system models. However, the presence of numerous latent variables in GPSSM incurs unresolved issues for existing variational inference approaches, particularly under the more realistic non-mean-field (NMF) assumption, including extensive training effort, compromised inference accuracy, and infeasibility for online applications, among others. In this paper, we tackle these challenges by incorporating the ensemble Kalman filter (EnKF), a well-established model-based filtering technique, into the NMF variational inference framework to approximate the posterior distribution of the latent states. This novel marriage between EnKF and GPSSM not only eliminates the need for extensive parameterization in learning variational distributions, but also enables an interpretable, closed-form approximation of the evidence lower bound (ELBO). Moreover, owing to the streamlined parameterization via the EnKF, the new GPSSM model can be easily accommodated in online learning applications. We demonstrate that the resulting EnKF-aided online algorithm embodies a principled objective function by ensuring data-fitting accuracy while incorporating model regularizations to mitigate overfitting. We also provide detailed analysis and fresh insights for the proposed algorithms. Comprehensive evaluation across diverse real and synthetic datasets corroborates the superior learning and inference performance of our EnKF-aided variational inference algorithms compared to existing methods.
Read more7/23/2024
➖
0
Outlier-Insensitive Kalman Filtering: Theory and Applications
Shunit Truzman, Guy Revach, Nir Shlezinger, Itzik Klein
State estimation of dynamical systems from noisy observations is a fundamental task in many applications. It is commonly addressed using the linear Kalman filter (KF), whose performance can significantly degrade in the presence of outliers in the observations, due to the sensitivity of its convex quadratic objective function. To mitigate such behavior, outlier detection algorithms can be applied. In this work, we propose a parameter-free algorithm which mitigates the harmful effect of outliers while requiring only a short iterative process of the standard update step of the KF. To that end, we model each potential outlier as a normal process with unknown variance and apply online estimation through either expectation maximization or alternating maximization algorithms. Simulations and field experiment evaluations demonstrate competitive performance of our method, showcasing its robustness to outliers in filtering scenarios compared to alternative algorithms.
Read more8/27/2024