A Learning Quasi-stiffness Control Framework of a Powered Trans-femoral Prosthesis for Adaptive Speed and Incline Walking

0

Sign in to get full access
Overview
- This paper presents a method for learning task-adaptive quasi-stiffness control for a powered transfemoral prosthesis.
- The goal is to enable the prosthesis to adapt its mechanical behavior to different walking tasks.
- The proposed approach uses a deep reinforcement learning algorithm to optimize the quasi-stiffness parameters of the prosthesis.
Plain English Explanation
Prosthetic limbs can be quite complex, with the ability to move and adapt to different situations. This paper explores a way to make a powered prosthetic leg, specifically one that replaces the thigh, better able to adjust its stiffness or firmness to different walking tasks.
The key idea is to use a machine learning technique called deep reinforcement learning to "teach" the prosthetic leg how to automatically adjust its stiffness based on the current walking task. This allows the prosthesis to be more flexible and responsive, rather than having a fixed stiffness setting.
For example, the prosthetic leg may need to be stiffer when walking uphill, but more compliant when walking downhill. By learning to adapt its stiffness, the prosthesis can provide better support and comfort for the user in various environments and activities.
The researchers developed a control system that can sense the walking task and then adjust the mechanical properties of the prosthetic leg accordingly. This "task-adaptive quasi-stiffness control" aims to enhance the safety and adaptability of powered prosthetic limbs.
Technical Explanation
Task Estimation
The method first involves estimating the current walking task from sensor data collected on the prosthetic leg. This includes measuring the joint angles, torques, and other mechanical variables. A deep neural network is trained to classify the task, such as level ground walking, stair ascent, or ramp descent.
Quasi-stiffness Optimization
Using a deep reinforcement learning algorithm, the system then optimizes the quasi-stiffness parameters of the prosthetic leg actuator to best suit the estimated walking task. Quasi-stiffness refers to the relationship between the joint angle and the corresponding joint torque.
The reinforcement learning agent explores different quasi-stiffness settings and receives rewards based on metrics like energy efficiency and tracking of desired joint trajectories. Over many iterations, it learns the optimal quasi-stiffness values for each walking task.
Experimental Evaluation
The researchers evaluated their approach through simulations and experiments with a powered transfemoral prosthesis prototype. They compared the task-adaptive quasi-stiffness control to a baseline fixed-stiffness controller.
The results showed that the learned, task-adaptive controller could improve energy efficiency and tracking performance across different walking tasks compared to the fixed-stiffness baseline. This demonstrates the potential of the approach to enhance the safety and adaptability of powered prosthetic limbs.
Critical Analysis
The paper provides a thorough technical explanation of the proposed control method and its evaluation. However, it does not discuss potential limitations or caveats in depth.
For example, the reliance on accurate task estimation from sensor data could be a point of failure if the classification neural network is not robust enough. Additionally, the reinforcement learning process may be computationally intensive and require extensive training data to converge to good quasi-stiffness policies.
Further research could explore ways to make the task estimation and optimization more efficient and reliable, as well as investigating the generalization of the learned policies to a wider range of walking tasks and environmental conditions.
Conclusion
This paper presents a promising approach for enhancing the adaptability of powered prosthetic limbs through task-adaptive quasi-stiffness control. By using deep reinforcement learning to optimize the mechanical properties of the prosthesis, the system can better support users during various walking activities.
The demonstrated improvements in energy efficiency and tracking performance suggest that this technique could lead to more comfortable and responsive powered prostheses. Further development and real-world testing would be important next steps to evaluate the practical benefits and limitations of this technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Learning Quasi-stiffness Control Framework of a Powered Trans-femoral Prosthesis for Adaptive Speed and Incline Walking
Teng Ma, Shucong Yin, Zhimin Hou, Yuxuan Wang, Binxin Huang, Haoyong Yu, Chenglong Fu
Impedance-based control represents a prevalent strategy in the powered trans femoral prostheses because of its ability to reproduce natural walking. However, most existing studies have developed impedance-based prosthesis controllers for specific tasks, while creating a task-adaptive controller for variable-task walking continues to be a significant challenge. This article proposes a task-adaptive quasi-stiffness control framework for powered prostheses that generalizes across various walking tasks, including the torque-angle relationship reconstruction part and the quasi-stiffness controller design part. A Gaussian Process Regression model is introduced to predict the target features of the human joints angle and torque in a new task. Subsequently, a Kernel Movement Primitives is employed to reconstruct the torque-angle relationship of the new task from multiple human reference trajectories and estimated target features. Based on the torque-angle relationship of the new task, a quasi-stiffness control approach is designed for a powered prosthesis. Finally, the proposed framework is validated through practical examples, including varying speeds and inclines walking tasks. Notably, the proposed framework not only aligns with but frequently surpasses the performance of a benchmark finite state machine impedance controller without necessitating manual impedance tuning and has the potential to expand to variable walking tasks in daily life for the trans-femoral amputees.
Read more9/4/2024

0
Time-Varying Foot-Placement Control for Underactuated Humanoid Walking on Swaying Rigid Surfaces
Yuan Gao, Victor Paredes, Yukai Gong, Zijian He, Ayonga Hereid, Yan Gu
Locomotion on dynamic rigid surface (i.e., rigid surface accelerating in an inertial frame) presents complex challenges for controller design, which are essential for deploying humanoid robots in dynamic real-world environments such as moving trains, ships, and airplanes. This paper introduces a real-time, provably stabilizing control approach for underactuated humanoid walking on periodically swaying rigid surface. The first key contribution is the analytical extension of the classical angular momentum-based linear inverted pendulum model from static to swaying grounds. This extension results in a time-varying, nonhomogeneous robot model, which is fundamentally different from the existing pendulum models. We synthesize a discrete footstep control law for the model and derive a new set of sufficient stability conditions that verify the controller's stabilizing effect. Another key contribution is the development of a hierarchical control framework that incorporates the proposed footstep control law as its higher-layer planner to ensure the stability of underactuated walking. The closed-loop stability of the complete hybrid, full-order robot dynamics under this control framework is provably analyzed based on nonlinear control theory. Finally, experiments conducted on a Digit humanoid robot, both in simulations and with hardware, demonstrate the framework's effectiveness in addressing underactuated bipedal locomotion on swaying ground, even in the presence of uncertain surface motions and unknown external pushes.
Read more9/16/2024
⚙️
0
Enhancing Prosthetic Safety and Environmental Adaptability: A Visual-Inertial Prosthesis Motion Estimation Approach on Uneven Terrains
Chuheng Chen, Xinxing Chen, Shucong Yin, Yuxuan Wang, Binxin Huang, Yuquan Leng, Chenglong Fu
Environment awareness is crucial for enhancing walking safety and stability of amputee wearing powered prosthesis when crossing uneven terrains such as stairs and obstacles. However, existing environmental perception systems for prosthesis only provide terrain types and corresponding parameters, which fails to prevent potential collisions when crossing uneven terrains and may lead to falls and other severe consequences. In this paper, a visual-inertial motion estimation approach is proposed for prosthesis to perceive its movement and the changes of spatial relationship between the prosthesis and uneven terrain when traversing them. To achieve this, we estimate the knee motion by utilizing a depth camera to perceive the environment and align feature points extracted from stairs and obstacles. Subsequently, an error-state Kalman filter is incorporated to fuse the inertial data into visual estimations to reduce the feature extraction error and obtain a more robust estimation. The motion of prosthetic joint and toe are derived using the prosthesis model parameters. Experiment conducted on our collected dataset and stair walking trials with a powered prosthesis shows that the proposed method can accurately tracking the motion of the human leg and prosthesis with an average root-mean-square error of toe trajectory less than 5 cm. The proposed method is expected to enable the environmental adaptive control for prosthesis, thereby enhancing amputee's safety and mobility in uneven terrains.
Read more4/30/2024
0
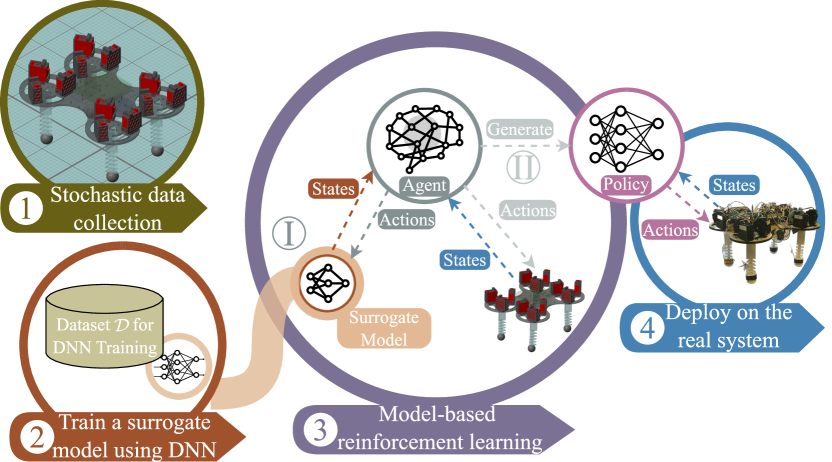
Optimal Gait Control for a Tendon-driven Soft Quadruped Robot by Model-based Reinforcement Learning
Xuezhi Niu, Kaige Tan, Lei Feng
This study presents an innovative approach to optimal gait control for a soft quadruped robot enabled by four Compressible Tendon-driven Soft Actuators (CTSAs). Improving our previous studies of using model-free reinforcement learning for gait control, we employ model-based reinforcement learning (MBRL) to further enhance the performance of the gait controller. Compared to rigid robots, the proposed soft quadruped robot has better safety, less weight, and a simpler mechanism for fabrication and control. However, the primary challenge lies in developing sophisticated control algorithms to attain optimal gait control for fast and stable locomotion. The research employs a multi-stage methodology, including state space restriction, data-driven model training, and reinforcement learning algorithm development. Compared to benchmark methods, the proposed MBRL algorithm, combined with post-training, significantly improves the efficiency and performance of gait control policies. The developed policy is both robust and adaptable to the robot's deformable morphology. The study concludes by highlighting the practical applicability of these findings in real-world scenarios.
Read more6/12/2024