Time-Varying Foot-Placement Control for Underactuated Humanoid Walking on Swaying Rigid Surfaces

0

Sign in to get full access
Overview
- This paper presents a time-varying foot-placement control algorithm for underactuated humanoid robots walking on swaying rigid surfaces.
- The algorithm uses a reduced-order model to predict the robot's future state and determine optimal foot placements to maintain stability.
- The approach is designed to handle challenging terrain conditions, such as a swaying platform, that are difficult for traditional control methods.
Plain English Explanation
The paper describes a new control system for legged robots that allows them to walk steadily on unstable ground. Legged robots can be difficult to control, especially when the ground they're walking on is moving or uneven. This algorithm uses a simplified model of the robot's movements to predict how it will respond to changes in the ground, and then adjusts the robot's footsteps accordingly to keep it balanced and stable.
The key innovation is that the control system adapts in real-time to the changing conditions, rather than relying on a fixed set of movements. This allows the robot to handle more challenging environments, like a platform that is swaying back and forth, which would cause traditional control systems to fail. By anticipating the robot's future state, the algorithm can dynamically adjust the foot placement to counteract the instability of the ground.
Technical Explanation
The paper presents a time-varying foot-placement control algorithm for underactuated humanoid robots walking on swaying rigid surfaces. The control system uses a reduced-order model to predict the robot's future state and determine optimal foot placements to maintain stability.
The authors develop a model-based control framework that can handle the challenges of dynamic ground conditions and underactuation. The controller utilizes a time-varying foot placement strategy, where the desired landing positions of the feet are updated at each control cycle to compensate for the swaying motion of the rigid surface.
Experiments demonstrate the effectiveness of the proposed approach in maintaining stable walking on a swaying platform, compared to a baseline controller. The results show the algorithm can handle significant disturbances and maintain balance in these challenging scenarios.
Critical Analysis
The paper provides a compelling solution for enabling robust legged robot locomotion on unstable terrain. The key strength is the use of a reduced-order model to predict the robot's future state and dynamically adjust the foot placements in response.
However, the paper does not extensively explore the limitations of the approach. For example, it is unclear how the controller would perform under more extreme or rapidly changing disturbances, or how sensitive it is to modeling inaccuracies. Additionally, the experiments are limited to a single type of rigid surface disturbance, so further validation on a wider range of terrain conditions would be valuable.
Another area for potential improvement is the computational efficiency of the control algorithm. While the reduced-order model helps, the real-time optimization required for the time-varying foot placement may still be challenging to implement on resource-constrained robotic platforms.
Overall, the research represents an important step forward in underactuated humanoid locomotion, but additional work may be needed to fully realize the potential of this approach in real-world applications.
Conclusion
This paper introduces a novel time-varying foot-placement control algorithm for enabling underactuated humanoid robots to walk stably on swaying rigid surfaces. By using a reduced-order model to predict the robot's future state, the controller can dynamically adjust the foot placements to counteract the instability of the environment.
The demonstrated results show the effectiveness of this approach in maintaining balance and locomotion under challenging dynamic ground conditions. While the research has some limitations that warrant further exploration, it represents a significant advancement in the field of legged robot control and could have important implications for the development of more versatile and resilient robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Time-Varying Foot-Placement Control for Underactuated Humanoid Walking on Swaying Rigid Surfaces
Yuan Gao, Victor Paredes, Yukai Gong, Zijian He, Ayonga Hereid, Yan Gu
Locomotion on dynamic rigid surface (i.e., rigid surface accelerating in an inertial frame) presents complex challenges for controller design, which are essential for deploying humanoid robots in dynamic real-world environments such as moving trains, ships, and airplanes. This paper introduces a real-time, provably stabilizing control approach for underactuated humanoid walking on periodically swaying rigid surface. The first key contribution is the analytical extension of the classical angular momentum-based linear inverted pendulum model from static to swaying grounds. This extension results in a time-varying, nonhomogeneous robot model, which is fundamentally different from the existing pendulum models. We synthesize a discrete footstep control law for the model and derive a new set of sufficient stability conditions that verify the controller's stabilizing effect. Another key contribution is the development of a hierarchical control framework that incorporates the proposed footstep control law as its higher-layer planner to ensure the stability of underactuated walking. The closed-loop stability of the complete hybrid, full-order robot dynamics under this control framework is provably analyzed based on nonlinear control theory. Finally, experiments conducted on a Digit humanoid robot, both in simulations and with hardware, demonstrate the framework's effectiveness in addressing underactuated bipedal locomotion on swaying ground, even in the presence of uncertain surface motions and unknown external pushes.
Read more9/16/2024

0
Demonstrating a Robust Walking Algorithm for Underactuated Bipedal Robots in Non-flat, Non-stationary Environments
Oluwami Dosunmu-Ogunbi, Aayushi Shrivastava, Jessy W Grizzle
This work explores an innovative algorithm designed to enhance the mobility of underactuated bipedal robots across challenging terrains, especially when navigating through spaces with constrained opportunities for foot support, like steps or stairs. By combining ankle torque with a refined angular momentum-based linear inverted pendulum model (ALIP), our method allows variability in the robot's center of mass height. We employ a dual-strategy controller that merges virtual constraints for precise motion regulation across essential degrees of freedom with an ALIP-centric model predictive control (MPC) framework, aimed at enforcing gait stability. The effectiveness of our feedback design is demonstrated through its application on the Cassie bipedal robot, which features 20 degrees of freedom. Key to our implementation is the development of tailored nominal trajectories and an optimized MPC that reduces the execution time to under 500 microseconds--and, hence, is compatible with Cassie's controller update frequency. This paper not only showcases the successful hardware deployment but also demonstrates a new capability, a bipedal robot using a moving walkway.
Read more9/9/2024

0
Dynamic Walking on Highly Underactuated Point Foot Humanoids: Closing the Loop between HZD and HLIP
Adrian B. Ghansah, Jeeseop Kim, Kejun Li, Aaron D. Ames
Realizing bipedal locomotion on humanoid robots with point feet is especially challenging due to their highly underactuated nature, high degrees of freedom, and hybrid dynamics resulting from impacts. With the goal of addressing this challenging problem, this paper develops a control framework for realizing dynamic locomotion and implements it on a novel point foot humanoid: ADAM. To this end, we close the loop between Hybrid Zero Dynamics (HZD) and Hybrid linear inverted pendulum (HLIP) based step length regulation. To leverage the full-order hybrid dynamics of the robot, walking gaits are first generated offline by utilizing HZD. These trajectories are stabilized online through the use of a HLIP based regulator. Finally, the planned trajectories are mapped into the full-order system using a task space controller incorporating inverse kinematics. The proposed method is verified through numerical simulations and hardware experiments on the humanoid robot ADAM marking the first humanoid point foot walking. Moreover, we experimentally demonstrate the robustness of the realized walking via the ability to track a desired reference speed, robustness to pushes, and locomotion on uneven terrain.
Read more6/21/2024
0
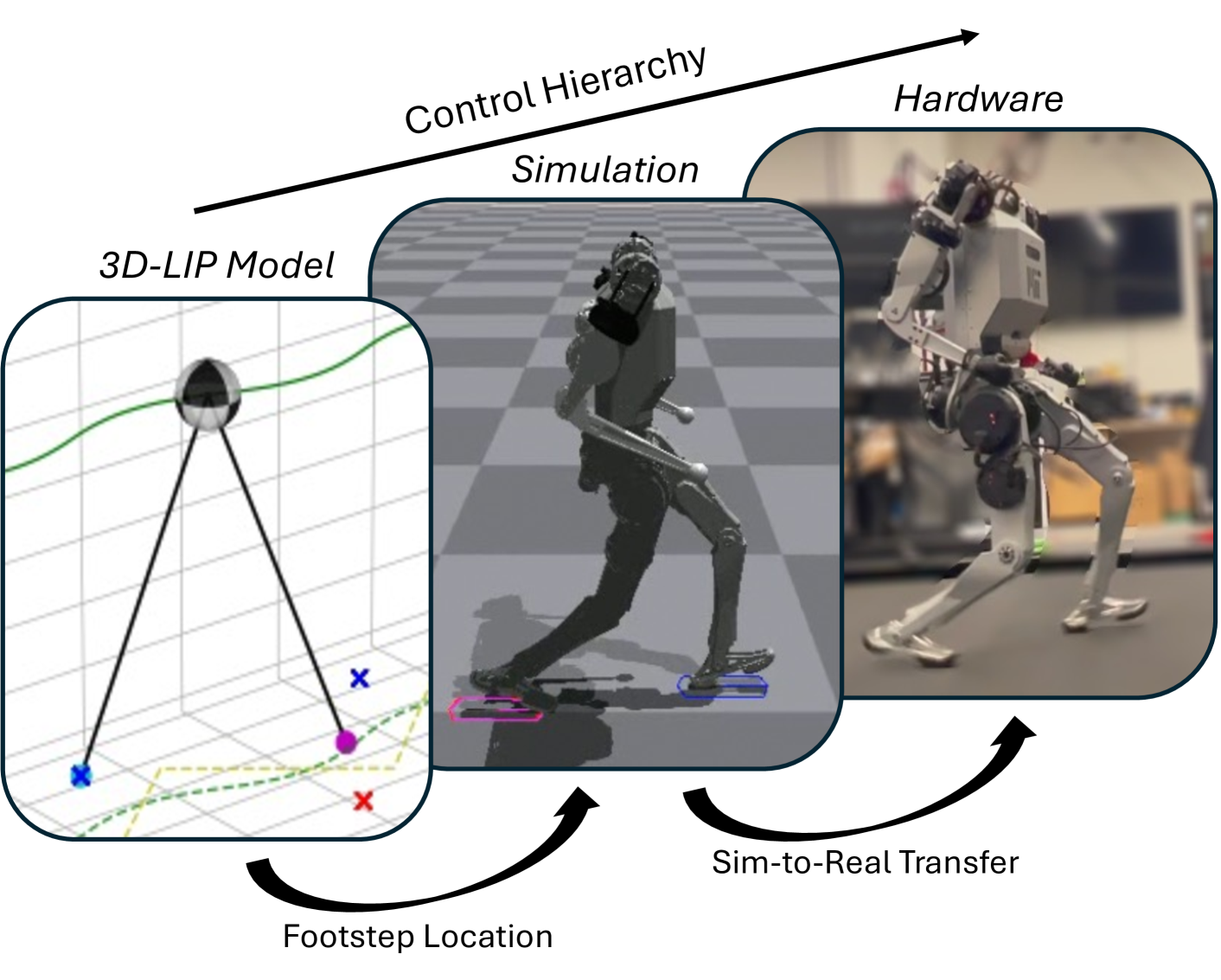
Integrating Model-Based Footstep Planning with Model-Free Reinforcement Learning for Dynamic Legged Locomotion
Ho Jae Lee, Seungwoo Hong, Sangbae Kim
In this work, we introduce a control framework that combines model-based footstep planning with Reinforcement Learning (RL), leveraging desired footstep patterns derived from the Linear Inverted Pendulum (LIP) dynamics. Utilizing the LIP model, our method forward predicts robot states and determines the desired foot placement given the velocity commands. We then train an RL policy to track the foot placements without following the full reference motions derived from the LIP model. This partial guidance from the physics model allows the RL policy to integrate the predictive capabilities of the physics-informed dynamics and the adaptability characteristics of the RL controller without overfitting the policy to the template model. Our approach is validated on the MIT Humanoid, demonstrating that our policy can achieve stable yet dynamic locomotion for walking and turning. We further validate the adaptability and generalizability of our policy by extending the locomotion task to unseen, uneven terrain. During the hardware deployment, we have achieved forward walking speeds of up to 1.5 m/s on a treadmill and have successfully performed dynamic locomotion maneuvers such as 90-degree and 180-degree turns.
Read more8/6/2024