Learning Resilient Formation Control of Drones with Graph Attention Network

0
Sign in to get full access
Overview
- This paper introduces a novel approach to learning resilient formation control of drones using a Graph Attention Network (GAT).
- The goal is to enable drones to maintain a desired formation even when faced with disturbances or failures of individual drones.
- The authors develop a deep reinforcement learning framework that allows drones to learn effective formation control policies.
Plain English Explanation
The paper describes a way to control a group of drones, like small flying robots, so they can maintain a specific formation or shape even when some of the drones have problems or there are other disturbances. The researchers use a type of artificial intelligence called a Graph Attention Network to help the drones learn how to stay in formation.
The key idea is that the drones need to pay attention to the state and behavior of their neighboring drones in the formation, and adjust their own actions accordingly. The Graph Attention Network allows the drones to learn these complex coordination policies through trial-and-error in a simulated environment.
This resilient formation control is important for applications like search and rescue missions, where the drones need to maintain a specific pattern to effectively cover an area. If some drones fail or get disrupted, the formation should be able to adapt and continue its mission without falling apart.
Technical Explanation
The paper presents a deep reinforcement learning framework for learning resilient formation control of a multi-drone system. The main technical components are:
-
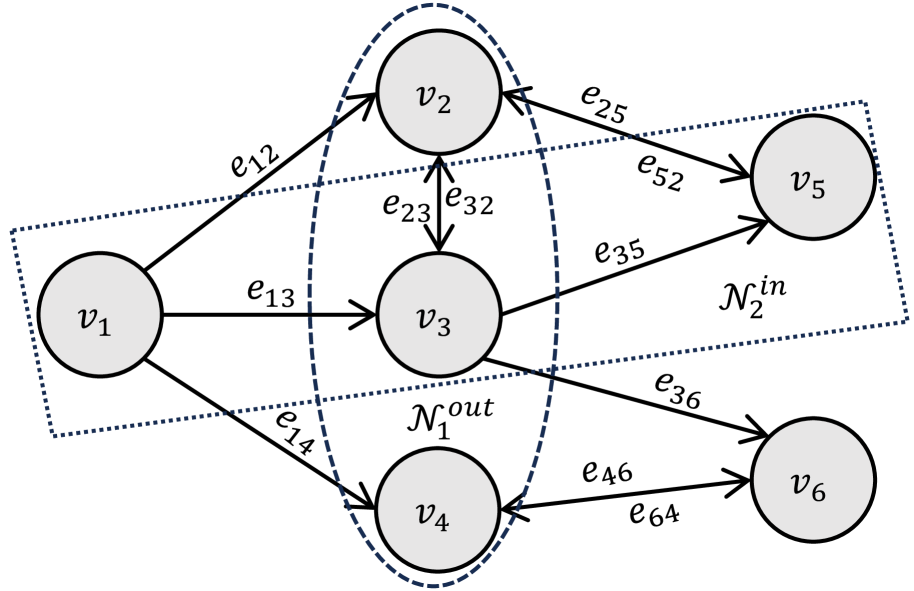
System Model: The authors model the multi-drone system as a graph, where each drone is a node and the communication links between drones are the edges. This graph-based representation allows the use of graph neural networks for learning decentralized control policies.
-
Graph Attention Network (GAT): The backbone of the control architecture is a GAT, which enables each drone to attend to the state information of its neighboring drones when deciding its own actions. This attention mechanism allows the drones to learn how to coordinate their movements and maintain the desired formation.
-
Reinforcement Learning: The drones learn their formation control policies through a deep reinforcement learning approach. They interact with a simulated environment, receive rewards for maintaining the formation, and update their GAT-based policies accordingly.
-
Resilience to Disturbances: The authors introduce various disturbances, such as random drone failures and environmental changes, during the training process. This helps the drones learn policies that are robust to such disruptions and can adapt the formation in a resilient manner.
The results show that the proposed GAT-based approach outperforms baseline methods in terms of maintaining formation cohesion and adapting to disturbances. This demonstrates the effectiveness of using graph neural networks for decentralized multi-agent coordination tasks.
Critical Analysis
The paper presents a promising approach to the challenging problem of resilient formation control for multi-drone systems. The use of a Graph Attention Network is a clever way to enable each drone to consider the state of its neighbors when deciding its own actions, which is crucial for maintaining a coherent formation.
One potential limitation is the reliance on a simulated environment for training the drones' policies. While the authors introduce various disturbances during training, the real-world deployment of such a system may face additional challenges not captured in the simulation. Further validation on physical drone platforms would be valuable to assess the practicality of this approach.
Additionally, the paper does not provide a detailed analysis of the computational complexity and scalability of the proposed method. As the number of drones grows, the centralized training process may become computationally intensive, and the authors could explore more distributed or hierarchical approaches to improve scalability.
Overall, this work demonstrates the potential of graph-based deep reinforcement learning techniques for multi-agent coordination problems. Continued research in this direction, with a focus on real-world applicability, could lead to significant advancements in the field of resilient multi-drone formation control.
Conclusion
This paper presents a novel approach to learning resilient formation control of drones using a Graph Attention Network (GAT) and deep reinforcement learning. The key innovation is the use of the GAT to enable each drone to attend to the state information of its neighboring drones, allowing for effective decentralized coordination and adaptation to disturbances.
The results show that this GAT-based approach outperforms baseline methods in maintaining formation cohesion and adapting to various disruptions, such as random drone failures and environmental changes. This work highlights the potential of graph neural networks for multi-agent coordination tasks and could have important implications for applications like search and rescue missions, where resilient formation control is crucial.
Further research is needed to validate the practicality of this approach in real-world settings and address potential scalability challenges as the number of drones increases. Nonetheless, this paper represents an important step forward in the field of resilient multi-drone formation control.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning Resilient Formation Control of Drones with Graph Attention Network
Jiaping Xiao, Xu Fang, Qianlei Jia, Mir Feroskhan
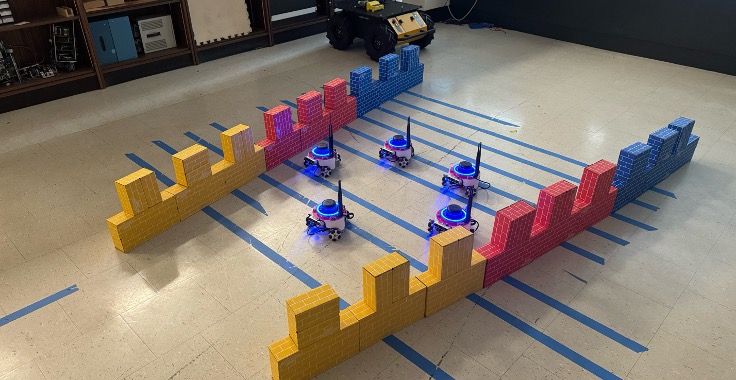
The rapid advancement of drone technology has significantly impacted various sectors, including search and rescue, environmental surveillance, and industrial inspection. Multidrone systems offer notable advantages such as enhanced efficiency, scalability, and redundancy over single-drone operations. Despite these benefits, ensuring resilient formation control in dynamic and adversarial environments, such as under communication loss or cyberattacks, remains a significant challenge. Classical approaches to resilient formation control, while effective in certain scenarios, often struggle with complex modeling and the curse of dimensionality, particularly as the number of agents increases. This paper proposes a novel, learning-based formation control for enhancing the adaptability and resilience of multidrone formations using graph attention networks (GATs). By leveraging GAT's dynamic capabilities to extract internode relationships based on the attention mechanism, this GAT-based formation controller significantly improves the robustness of drone formations against various threats, such as Denial of Service (DoS) attacks. Our approach not only improves formation performance in normal conditions but also ensures the resilience of multidrone systems in variable and adversarial environments. Extensive simulation results demonstrate the superior performance of our method over baseline formation controllers. Furthermore, the physical experiments validate the effectiveness of the trained control policy in real-world flights.
Read more9/4/2024
0
Multi-Robot Collaborative Navigation with Formation Adaptation
Zihao Deng, Peng Gao, Williard Joshua Jose, Hao Zhang
Multi-robot collaborative navigation is an essential ability where teamwork and synchronization are keys. In complex and uncertain environments, adaptive formation is vital, as rigid formations prove to be inadequate. The ability of robots to dynamically adjust their formation enables navigation through unpredictable spaces, maintaining cohesion, and effectively responding to environmental challenges. In this paper, we introduce a novel approach that uses bi-level learning framework. Specifically, we use graph learning at a high level for group coordination and reinforcement learning for individual navigation. We innovate by integrating a spring-damper model within the reinforcement learning reward mechanism, addressing the rigidity of traditional formation control methods. During execution, our approach enables a team of robots to successfully navigate challenging environments, maintain a desired formation shape, and dynamically adjust their formation scale based on environmental information. We conduct extensive experiments to evaluate our approach across three distinct formation scenarios in multi-robot navigation: circle, line, and wedge. Experimental results show that our approach achieves promising results and scalability on multi-robot navigation with formation adaptation.
Read more4/3/2024
🔮
0
Fighter flight trajectory prediction based on spatio-temporal graphcial attention network
Yao Sun (School of Aeronautical Engineering, Air Force Engineering University, Xi'an, China), Tengyu Jing (School of Information and Communication Engineering, Xidian University, Xi'an, China), Jiapeng Wang (School of Information and Communication Engineering, Xidian University, Xi'an, China), Wei Wang (School of Information and Communication Engineering, Xidian University, Xi'an, China)
Quickly and accurately predicting the flight trajectory of a blue army fighter in close-range air combat helps a red army fighter gain a dominant situation, which is the winning factor in later air combat. However,due to the high speed and even hypersonic capabilities of advanced fighters, the diversity of tactical maneuvers,and the instantaneous nature of situational transitions,it is difficult to meet the requirements of practical combat applications in terms of prediction accuracy.To improve prediction accuracy,this paper proposes a spatio-temporal graph attention network (ST-GAT) using encoding and decoding structures to predict the flight trajectory. The encoder adopts a parallel structure of Transformer and GAT branches embedded with the multi-head self-attention mechanism in each front end. The Transformer branch network is used to extract the temporal characteristics of historical trajectories and capture the impact of the fighter's historical state on future trajectories, while the GAT branch network is used to extract spatial features in historical trajectories and capture potential spatial correlations between fighters.Then we concatenate the outputs of the two branches into a new feature vector and input it into a decoder composed of a fully connected network to predict the future position coordinates of the blue army fighter.The computer simulation results show that the proposed network significantly improves the prediction accuracy of flight trajectories compared to the enhanced CNN-LSTM network (ECNN-LSTM), with improvements of 47% and 34% in both ADE and FDE indicators,providing strong support for subsequent autonomous combat missions.
Read more5/15/2024

0
Radial Basis Function Neural Networks for Formation Control of Unmanned Aerial Vehicles
Duy-Nam Bui, Manh Duong Phung
This paper addresses the problem of controlling multiple unmanned aerial vehicles (UAVs) cooperating in a formation to carry out a complex task such as surface inspection. We first use the virtual leader-follower model to determine the topology and trajectory of the formation. A double-loop control system combining backstepping and sliding mode control techniques is then designed for the UAVs to track the trajectory. A radial basis function neural network (RBFNN) capable of estimating external disturbances is developed to enhance the robustness of the controller. The stability of the controller is proven by using the Lyapunov theorem. A number of comparisons and software-in-the-loop (SIL) tests have been conducted to evaluate the performance of the proposed controller. The results show that our controller not only outperforms other state-of-the-art controllers but is also sufficient for complex tasks of UAVs such as collecting surface data for inspection. The source code of our controller can be found at https://github.com/duynamrcv/rbf_bsmc
Read more4/23/2024