Learning Tactile Insertion in the Real World

0
Sign in to get full access
Overview
- This paper presents a novel approach for learning tactile insertion in the real world using a robotic platform.
- The researchers develop a system that can learn to insert objects into tight spaces by leveraging tactile sensing and feedback.
- The system is evaluated on a variety of insertion tasks, demonstrating its effectiveness in the real world.
Plain English Explanation
The paper describes a robotic system that can learn how to insert objects into tight spaces using touch or tactile sensing. This is an important capability for robots, as being able to precisely insert objects is crucial for many real-world tasks like assembly, manipulation, and surgery.
The researchers developed a robot with tactile sensors that can "feel" its environment. By training the robot to learn from these tactile cues, it can figure out how to successfully insert objects even in challenging scenarios where the target location may be hard to see or access.
The paper shows the robot performing a variety of insertion tasks, like putting pegs into holes or inserting objects into constrained spaces. The robot is able to learn and adapt its insertion strategy based on the tactile feedback it receives, allowing it to succeed even when the task is difficult.
This research advances the field of haptic feedback and tactile sensing for robotics, bringing us closer to robots that can dexterously manipulate objects in the real world just like humans can. It also has applications in areas like sensorized robotic hands and skill transfer between robotic systems.
Technical Explanation
The paper presents a system for learning tactile insertion using a robotic platform. The key components are:
-
Robotic Platform: The researchers use a 7-DOF robotic arm with a two-finger parallel gripper. The gripper is equipped with tactile sensors that can measure forces and torques during the insertion process.
-
Learning Algorithm: The researchers use a deep reinforcement learning approach to train the robot to perform insertion tasks. The robot's actions are determined by a neural network policy that takes in the current tactile sensor readings and outputs the appropriate gripper motion.
-
Insertion Task: The robot is evaluated on a variety of insertion tasks, including inserting pegs into holes, putting objects into constrained spaces, and aligning parts for assembly. These tasks require precision and dexterity to successfully complete.
-
Training and Evaluation: The robot is first trained in simulation using a physics-based environment. It then transfers the learned skills to the real-world robotic platform and is evaluated on the same insertion tasks. The results demonstrate the system's ability to learn effective tactile insertion strategies.
The key insight of this work is that by learning from tactile feedback, the robot can develop robust insertion skills that generalize to a wide range of real-world scenarios. This is in contrast to traditional approaches that rely solely on vision or predefined motion plans, which can struggle with complex, unstructured environments.
Critical Analysis
The paper presents a promising approach for learning tactile insertion, but there are a few caveats and areas for further research:
-
Sim-to-Real Transfer: While the researchers show successful transfer of the learned skills from simulation to the real world, this can be a challenging problem in itself. Ensuring that the simulation accurately models the real-world dynamics and tactile interactions is crucial for effective transfer.
-
Scalability and Generalization: The paper focuses on a relatively small set of insertion tasks. It would be interesting to see how well the system scales to more complex, varied insertion scenarios, and whether the learned skills can generalize to new tasks beyond the training distribution.
-
Interpretability and Transparency: As with many deep learning approaches, the inner workings of the neural network policy may be difficult to interpret. Providing more insight into how the system makes decisions and what tactile cues it is leveraging could improve trust and understanding.
-
Safety and Robustness: Insertion tasks can involve physical contact and potential damage to the robot or environment. Ensuring the system is robust to unexpected perturbations and can operate safely in the real world is an important consideration.
Overall, this paper represents an important step forward in the field of learning visuotactile skills for robotic manipulation. The researchers have demonstrated a compelling approach for enabling robots to learn effective tactile insertion strategies, with promising results in the real world. Continued research and development in this area could lead to significant advancements in robotic dexterity and autonomy.
Conclusion
This paper presents a novel approach for learning tactile insertion in the real world using a robotic platform. The researchers developed a system that can leverage tactile sensing and feedback to learn how to successfully insert objects into tight spaces, even in challenging scenarios.
The results demonstrate the effectiveness of the system across a variety of insertion tasks, showcasing the potential of this approach for advancing robotic manipulation capabilities. While there are some caveats and areas for further research, this work represents an important step forward in the field of haptic feedback, tactile sensing, and sensorized robotic hands, with broader implications for skill transfer between robotic systems and the development of more dexterous, autonomous robots.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning Tactile Insertion in the Real World
Daniel Palenicek, Theo Gruner, Tim Schneider, Alina Bohm, Janis Lenz, Inga Pfenning, Eric Kramer, Jan Peters
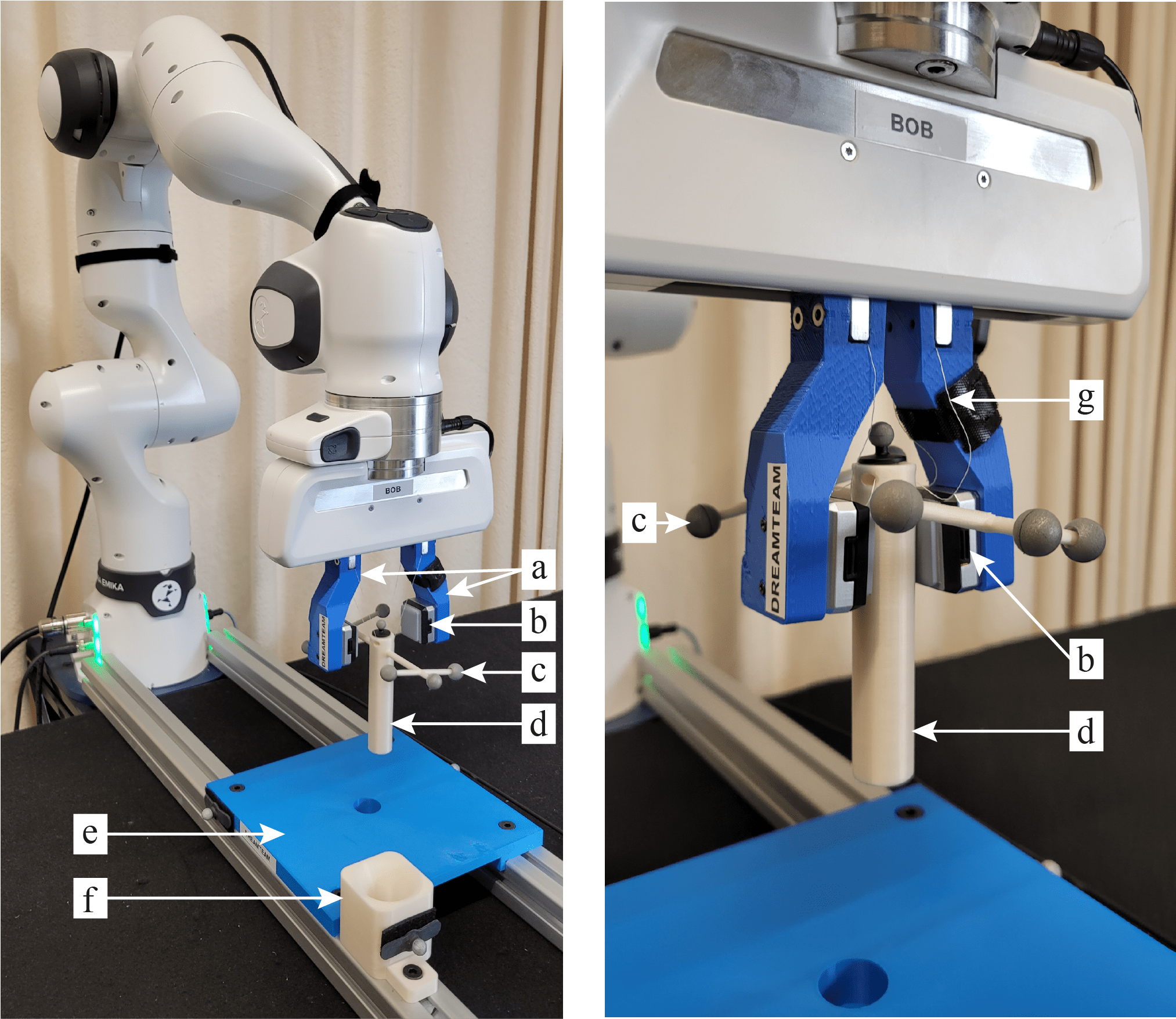
Humans have exceptional tactile sensing capabilities, which they can leverage to solve challenging, partially observable tasks that cannot be solved from visual observation alone. Research in tactile sensing attempts to unlock this new input modality for robots. Lately, these sensors have become cheaper and, thus, widely available. At the same time, the question of how to integrate them into control loops is still an active area of research, with central challenges being partial observability and the contact-rich nature of manipulation tasks. In this study, we propose to use Reinforcement Learning to learn an end-to-end policy, mapping directly from tactile sensor readings to actions. Specifically, we use Dreamer-v3 on a challenging, partially observable robotic insertion task with a Franka Research 3, both in simulation and on a real system. For the real setup, we built a robotic platform capable of resetting itself fully autonomously, allowing for extensive training runs without human supervision. Our preliminary results indicate that Dreamer is capable of utilizing tactile inputs to solve robotic manipulation tasks in simulation and reality. Furthermore, we find that providing the robot with tactile feedback generally improves task performance, though, in our setup, we do not yet include other sensing modalities. In the future, we plan to utilize our platform to evaluate a wide range of other Reinforcement Learning algorithms on tactile tasks.
Read more8/1/2024
🌿
0
MimicTouch: Leveraging Multi-modal Human Tactile Demonstrations for Contact-rich Manipulation
Kelin Yu, Yunhai Han, Qixian Wang, Vaibhav Saxena, Danfei Xu, Ye Zhao
Tactile sensing is critical to fine-grained, contact-rich manipulation tasks, such as insertion and assembly. Prior research has shown the possibility of learning tactile-guided policy from teleoperated demonstration data. However, to provide the demonstration, human users often rely on visual feedback to control the robot. This creates a gap between the sensing modality used for controlling the robot (visual) and the modality of interest (tactile). To bridge this gap, we introduce MimicTouch, a novel framework for learning policies directly from demonstrations provided by human users with their hands. The key innovations are i) a human tactile data collection system which collects multi-modal tactile dataset for learning human's tactile-guided control strategy, ii) an imitation learning-based framework for learning human's tactile-guided control strategy through such data, and iii) an online residual RL framework to bridge the embodiment gap between the human hand and the robot gripper. Through comprehensive experiments, we highlight the efficacy of utilizing human's tactile-guided control strategy to resolve contact-rich manipulation tasks. The project website is at https://sites.google.com/view/MimicTouch.
Read more9/6/2024
📈
0
Integrating Visuo-tactile Sensing with Haptic Feedback for Teleoperated Robot Manipulation
Noah Becker, Erik Gattung, Kay Hansel, Tim Schneider, Yaonan Zhu, Yasuhisa Hasegawa, Jan Peters
Telerobotics enables humans to overcome spatial constraints and allows them to physically interact with the environment in remote locations. However, the sensory feedback provided by the system to the operator is often purely visual, limiting the operator's dexterity in manipulation tasks. In this work, we address this issue by equipping the robot's end-effector with high-resolution visuotactile GelSight sensors. Using low-cost MANUS-Gloves, we provide the operator with haptic feedback about forces acting at the points of contact in the form of vibration signals. We propose two different methods for estimating these forces; one based on estimating the movement of markers on the sensor surface and one deep-learning approach. Additionally, we integrate our system into a virtual-reality teleoperation pipeline in which a human operator controls both arms of a Tiago robot while receiving visual and haptic feedback. We believe that integrating haptic feedback is a crucial step for dexterous manipulation in teleoperated robotic systems.
Read more5/1/2024

0
Learning In-Hand Translation Using Tactile Skin With Shear and Normal Force Sensing
Jessica Yin, Haozhi Qi, Jitendra Malik, James Pikul, Mark Yim, Tess Hellebrekers
Recent progress in reinforcement learning (RL) and tactile sensing has significantly advanced dexterous manipulation. However, these methods often utilize simplified tactile signals due to the gap between tactile simulation and the real world. We introduce a sensor model for tactile skin that enables zero-shot sim-to-real transfer of ternary shear and binary normal forces. Using this model, we develop an RL policy that leverages sliding contact for dexterous in-hand translation. We conduct extensive real-world experiments to assess how tactile sensing facilitates policy adaptation to various unseen object properties and robot hand orientations. We demonstrate that our 3-axis tactile policies consistently outperform baselines that use only shear forces, only normal forces, or only proprioception. Website: https://jessicayin.github.io/tactile-skin-rl/
Read more7/11/2024