Generalize by Touching: Tactile Ensemble Skill Transfer for Robotic Furniture Assembly

0

Sign in to get full access
Overview
- This paper presents a new approach for transferring tactile skills from one task to another, allowing robots to generalize their capabilities for furniture assembly.
- The researchers developed a tactile ensemble learning method that can efficiently learn and transfer complex manipulation skills across tasks.
- The proposed approach was evaluated through furniture assembly experiments, demonstrating its ability to enable robots to generalize their skills and adapt to new tasks.
Plain English Explanation
In this research, the authors wanted to help robots become better at assembling furniture. Robots often struggle to adapt their skills from one task to another, which can make them inefficient at complex assembly jobs. The researchers developed a new technique called "tactile ensemble learning" that allows robots to learn and transfer complex manipulation skills more effectively.
The key idea is to have the robots learn from a variety of different tactile sensors rather than relying on a single sensor. This "ensemble" approach helps the robots build a more robust and generalizable understanding of the task.
The researchers then demonstrated how this tactile ensemble learning method could enable robots to assemble furniture more efficiently, by allowing them to transfer and adapt their skills to new types of furniture. This represents an important step towards making robots more versatile and capable of handling a wider range of real-world tasks.
Technical Explanation
The paper proposes a novel approach called "tactile ensemble learning" to enable robots to efficiently learn and transfer complex manipulation skills across different furniture assembly tasks. The key idea is to leverage an ensemble of diverse tactile sensors, rather than relying on a single sensor, to build a more robust and generalizable understanding of the task.
The researchers first trained the robot to perform a specific furniture assembly task using the tactile ensemble learning method. This involved having the robot interact with the furniture components using multiple tactile sensors and learning the relationship between the tactile feedback and the successful completion of the assembly steps.
The researchers then demonstrated how the learned tactile skills could be effectively transferred to new furniture assembly tasks. By leveraging the ensemble of tactile sensors, the robot was able to adapt its manipulation skills to the new task, without having to learn everything from scratch. This enables the robot to generalize its capabilities and become more versatile in handling a wider range of real-world assembly tasks.
Critical Analysis
The paper presents a promising approach for enabling robots to efficiently learn and transfer complex manipulation skills, which is a crucial capability for tasks like furniture assembly. The use of a tactile ensemble learning method is a novel and well-justified idea, as it allows the robot to build a more comprehensive understanding of the task compared to relying on a single sensor.
However, the evaluation of the proposed approach is primarily focused on simulated furniture assembly tasks, and it remains to be seen how well the method would translate to real-world scenarios. The researchers acknowledge this limitation and suggest further testing in physical environments as an area for future work.
Additionally, the paper does not provide a detailed analysis of the robustness of the tactile ensemble learning method to variations in the furniture components or the assembly process. It would be valuable to understand how well the approach can handle unexpected scenarios or changes in the task parameters.
Overall, the research presents a promising step towards improving the versatility and adaptability of robots in complex manipulation tasks, but further investigation is needed to fully understand the strengths, limitations, and practical implications of the proposed approach.
Conclusion
This paper introduces a new tactile ensemble learning method that enables robots to efficiently learn and transfer complex manipulation skills for furniture assembly tasks. By leveraging an ensemble of diverse tactile sensors, the robots are able to build a more robust and generalizable understanding of the task, allowing them to adapt their skills to new furniture assembly challenges.
The evaluation of the proposed approach through simulated furniture assembly experiments demonstrates its potential to significantly improve the versatility and efficiency of robotic systems in real-world applications. Further research and testing in physical environments will be important to fully validate the effectiveness and practical implications of this tactile ensemble learning method.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Generalize by Touching: Tactile Ensemble Skill Transfer for Robotic Furniture Assembly
Haohong Lin, Radu Corcodel, Ding Zhao
Furniture assembly remains an unsolved problem in robotic manipulation due to its long task horizon and nongeneralizable operations plan. This paper presents the Tactile Ensemble Skill Transfer (TEST) framework, a pioneering offline reinforcement learning (RL) approach that incorporates tactile feedback in the control loop. TEST's core design is to learn a skill transition model for high-level planning, along with a set of adaptive intra-skill goal-reaching policies. Such design aims to solve the robotic furniture assembly problem in a more generalizable way, facilitating seamless chaining of skills for this long-horizon task. We first sample demonstration from a set of heuristic policies and trajectories consisting of a set of randomized sub-skill segments, enabling the acquisition of rich robot trajectories that capture skill stages, robot states, visual indicators, and crucially, tactile signals. Leveraging these trajectories, our offline RL method discerns skill termination conditions and coordinates skill transitions. Our evaluations highlight the proficiency of TEST on the in-distribution furniture assemblies, its adaptability to unseen furniture configurations, and its robustness against visual disturbances. Ablation studies further accentuate the pivotal role of two algorithmic components: the skill transition model and tactile ensemble policies. Results indicate that TEST can achieve a success rate of 90% and is over 4 times more efficient than the heuristic policy in both in-distribution and generalization settings, suggesting a scalable skill transfer approach for contact-rich manipulation.
Read more4/30/2024

0
Learning In-Hand Translation Using Tactile Skin With Shear and Normal Force Sensing
Jessica Yin, Haozhi Qi, Jitendra Malik, James Pikul, Mark Yim, Tess Hellebrekers
Recent progress in reinforcement learning (RL) and tactile sensing has significantly advanced dexterous manipulation. However, these methods often utilize simplified tactile signals due to the gap between tactile simulation and the real world. We introduce a sensor model for tactile skin that enables zero-shot sim-to-real transfer of ternary shear and binary normal forces. Using this model, we develop an RL policy that leverages sliding contact for dexterous in-hand translation. We conduct extensive real-world experiments to assess how tactile sensing facilitates policy adaptation to various unseen object properties and robot hand orientations. We demonstrate that our 3-axis tactile policies consistently outperform baselines that use only shear forces, only normal forces, or only proprioception. Website: https://jessicayin.github.io/tactile-skin-rl/
Read more7/11/2024

0
New!TacDiffusion: Force-domain Diffusion Policy for Precise Tactile Manipulation
Yansong Wu, Zongxie Chen, Fan Wu, Lingyun Chen, Liding Zhang, Zhenshan Bing, Abdalla Swikir, Alois Knoll, Sami Haddadin
Assembly is a crucial skill for robots in both modern manufacturing and service robotics. However, mastering transferable insertion skills that can handle a variety of high-precision assembly tasks remains a significant challenge. This paper presents a novel framework that utilizes diffusion models to generate 6D wrench for high-precision tactile robotic insertion tasks. It learns from demonstrations performed on a single task and achieves a zero-shot transfer success rate of 95.7% across various novel high-precision tasks. Our method effectively inherits the self-adaptability demonstrated by our previous work. In this framework, we address the frequency misalignment between the diffusion policy and the real-time control loop with a dynamic system-based filter, significantly improving the task success rate by 9.15%. Furthermore, we provide a practical guideline regarding the trade-off between diffusion models' inference ability and speed.
Read more9/18/2024
0
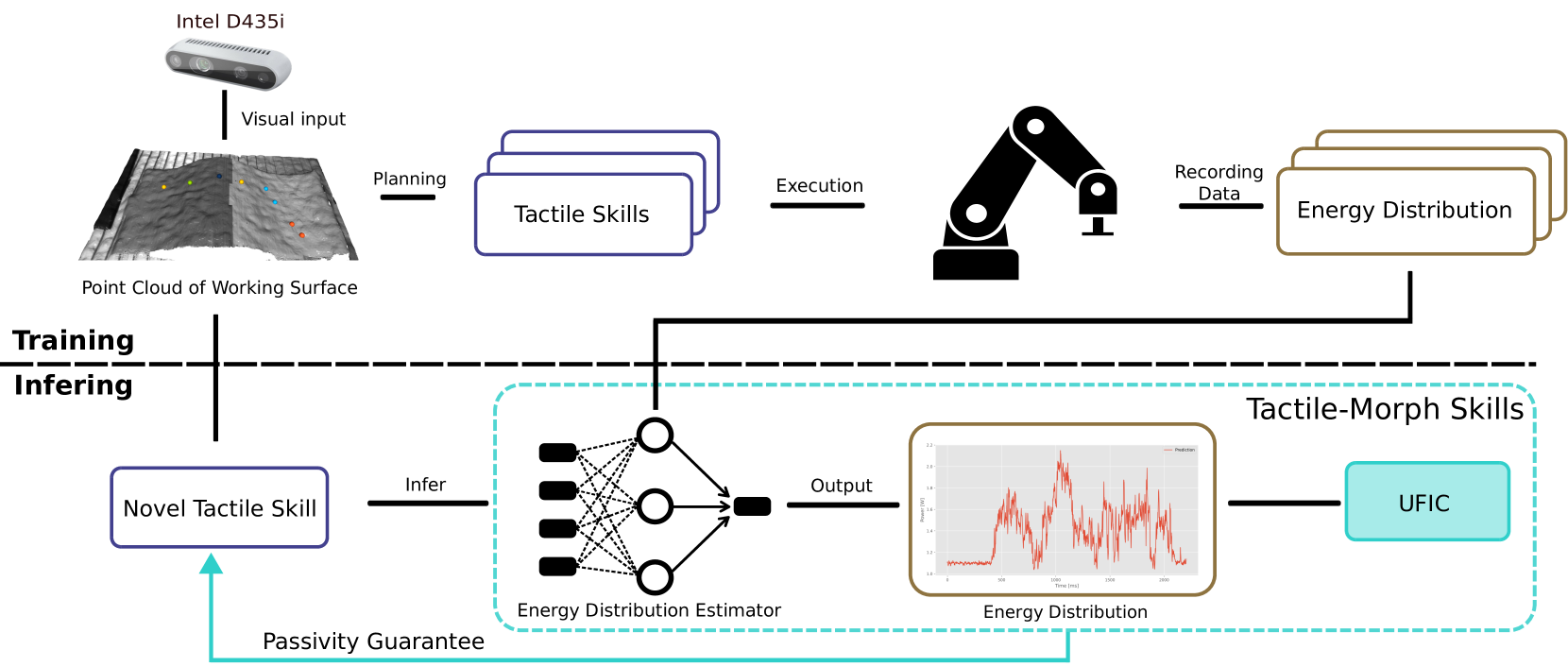
Tactile-Morph Skills: Energy-Based Control Meets Data-Driven Learning
Anran Zhang, Kubra Karacan, Hamid Sadeghian, Yansong Wu, Fan Wu, Sami Haddadin
Robotic manipulation is essential for modernizing factories and automating industrial tasks like polishing, which require advanced tactile abilities. These robots must be easily set up, safely work with humans, learn tasks autonomously, and transfer skills to similar tasks. Addressing these needs, we introduce the tactile-morph skill framework, which integrates unified force-impedance control with data-driven learning. Our system adjusts robot movements and force application based on estimated energy levels for the desired trajectory and force profile, ensuring safety by stopping if energy allocated for the control runs out. Using a Temporal Convolutional Network, we estimate the energy distribution for a given motion and force profile, enabling skill transfer across different tasks and surfaces. Our approach maintains stability and performance even on unfamiliar geometries with similar friction characteristics, demonstrating improved accuracy, zero-shot transferable performance, and enhanced safety in real-world scenarios. This framework promises to enhance robotic capabilities in industrial settings, making intelligent robots more accessible and valuable.
Read more8/26/2024