Learning to Communicate Functional States with Nonverbal Expressions for Improved Human-Robot Collaboration

0
🛠️
Sign in to get full access
Overview
- Nonverbal communication is important for effective human-robot interaction, but can be misunderstood
- This work explores modulating acoustic parameters of nonverbal auditory expressions to convey robot states
- A reinforcement learning (RL) algorithm is used to produce accurately interpreted nonverbal auditory expressions
- The approach was evaluated through a user study, demonstrating its effectiveness in improving users' ability to identify robot states
Plain English Explanation
Robots that work alongside humans need to be able to effectively communicate their internal state and what they are doing. One way they can do this is through nonverbal communication, like sounds or motions. However, these nonverbal cues can sometimes be misunderstood by humans.
In this research, the team explored using different acoustic parameters, like pitch, rhythm, and tempo, to create nonverbal audio expressions that could convey a robot's state, such as whether it has accomplished a task, is still working on something, or is stuck. They developed a reinforcement learning algorithm that could learn the best combination of acoustic parameters to use for each robot state, based on feedback from human participants.
The researchers then tested this approach in a user study, and found that:
- The RL algorithm was able to learn the right acoustic parameter values to help users better identify the robot's state. [Link to "tell-show-combining-multiple-modalities-to-communicate"]
- Using previous user data to initialize the algorithm significantly sped up the learning process.
- The specific method used to initialize the algorithm influenced whether participants converged on similar sounds for each state.
- Changing the pitch bend of the sounds had the biggest impact on users' ability to associate the sounds with the robot's state.
The key idea is to use machine learning to figure out the best way to use nonverbal audio cues, like variations in pitch and rhythm, to help humans understand what a robot is doing and what state it is in. This could lead to smoother and more natural interactions between humans and collaborative robots. [Link to "robotic-blended-sonification-consequential-robot-sound-as", "verco-learning-coordinated-verbal-communication-multi-agent", "beyond-text-utilizing-vocal-cues-to-improve", "integrating-large-language-models-multimodal-virtual-reality"]
Technical Explanation
This work explores the use of nonverbal auditory expressions to convey the internal state of collaborative robots to humans. The authors propose a reinforcement learning (RL) algorithm to learn the optimal acoustic parameter values (pitch bend, beats per minute, beats per loop) that can accurately communicate functional robot states (accomplished, progressing, stuck) to users.
The RL algorithm is trained using noisy human feedback, where participants in a user study rate the association between the generated sounds and the robot states. The algorithm aims to maximize the accuracy of the users' interpretations of the robot's state based on the auditory cues.
The proposed approach was evaluated through a user study with 24 participants. The results show that:
- The RL-based approach is able to learn suitable acoustic parameter values that improve users' ability to correctly identify the state of the robot.
- Initializing the algorithm with previous user data can significantly speed up the learning process.
- The method used for algorithm initialization influences whether participants converge to similar sounds for each robot state.
- Modulation of pitch bend has the largest influence on user association between sounds and robotic states.
These findings demonstrate the effectiveness of using machine learning to generate nonverbal auditory expressions that can improve human-robot communication and lead to smoother interactions between humans and collaborative robots.
Critical Analysis
The research presented in this paper is a promising approach to improving human-robot interaction through nonverbal auditory communication. The use of reinforcement learning to optimize the acoustic parameters for conveying robot states is a novel and compelling idea.
However, the paper does not address some potential limitations and areas for further research. For example, the study was conducted in a controlled laboratory setting with a relatively small number of participants. It would be important to evaluate the approach in more realistic and diverse settings to understand its real-world applicability and generalizability.
Additionally, the paper does not discuss the potential for conflicts or misunderstandings that could arise from the use of these nonverbal auditory cues. It would be valuable to explore how users with different backgrounds, experiences, or cultural contexts might interpret the sounds differently, and how the system could be made more robust to such variations. [Link to "beyond-text-utilizing-vocal-cues-to-improve"]
Furthermore, the paper does not address the scalability of the approach. As the number of robot states and acoustic parameters increases, the complexity of the RL algorithm and the training process may become challenging. Investigating techniques to improve the scalability and efficiency of the system would be an important area for future research.
Overall, this paper presents a promising approach to enhancing human-robot interaction through the use of nonverbal auditory expressions. However, further research is needed to address the potential limitations and explore the broader implications of this technology. [Link to "integrating-large-language-models-multimodal-virtual-reality"]
Conclusion
This research explores the use of nonverbal auditory expressions to effectively communicate the internal state of collaborative robots to humans. The key idea is to use a reinforcement learning algorithm to optimize the acoustic parameters, such as pitch, rhythm, and tempo, to create sounds that can accurately convey the robot's state, whether it has accomplished a task, is still working on something, or is stuck.
The results of the user study demonstrate the effectiveness of this approach in improving users' ability to correctly identify the robot's state based on the generated auditory cues. The findings also highlight the importance of initializing the algorithm with previous user data and the significant influence of pitch bend modulation on the association between sounds and robot states.
This research represents an important step towards enhancing human-robot interaction and enabling smoother collaboration between humans and robots. By using nonverbal communication cues that are tailored to the user's understanding, robots can more effectively convey their internal state and intentions, leading to more natural and intuitive interactions. Further exploration of this approach in real-world settings and with larger-scale systems could yield valuable insights and drive the development of more advanced and user-friendly collaborative robots. [Link to "tell-show-combining-multiple-modalities-to-communicate", "robotic-blended-sonification-consequential-robot-sound-as", "verco-learning-coordinated-verbal-communication-multi-agent"]
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛠️
0
Learning to Communicate Functional States with Nonverbal Expressions for Improved Human-Robot Collaboration
Liam Roy, Dana Kulic, Elizabeth Croft
Collaborative robots must effectively communicate their internal state to humans to enable a smooth interaction. Nonverbal communication is widely used to communicate information during human-robot interaction, however, such methods may also be misunderstood, leading to communication errors. In this work, we explore modulating the acoustic parameter values (pitch bend, beats per minute, beats per loop) of nonverbal auditory expressions to convey functional robot states (accomplished, progressing, stuck). We propose a reinforcement learning (RL) algorithm based on noisy human feedback to produce accurately interpreted nonverbal auditory expressions. The proposed approach was evaluated through a user study with 24 participants. The results demonstrate that: 1. Our proposed RL-based approach is able to learn suitable acoustic parameter values which improve the users' ability to correctly identify the state of the robot. 2. Algorithm initialization informed by previous user data can be used to significantly speed up the learning process. 3. The method used for algorithm initialization strongly influences whether participants converge to similar sounds for each robot state. 4. Modulation of pitch bend has the largest influence on user association between sounds and robotic states.
Read more5/1/2024

0
Model-free Legibility: Enhancing Human-Robot Interactions through Implicit Communication and Influence Modulation
Haoyang Jiang, Elizabeth A. Croft, Michael G. Burke
Communication is essential for successful interaction. In human-robot interaction, implicit communication enhances robots' understanding of human needs, emotions, and intentions. This paper introduces a method to foster implicit communication in HRI without explicitly modeling human intentions or relying on pre-existing knowledge. Leveraging Transfer Entropy, we modulate influence between agents in social interactions in scenarios involving either collaboration or competition. By integrating influence into agents' rewards within a partially observable Markov decision process, we demonstrate that boosting influence enhances collaboration or competition performance, while resisting influence diminishes performance. Our findings are validated through simulations and real-world experiments with human participants.
Read more6/19/2024

0
Tell and show: Combining multiple modalities to communicate manipulation tasks to a robot
Petr Vanc, Radoslav Skoviera, Karla Stepanova
As human-robot collaboration is becoming more widespread, there is a need for a more natural way of communicating with the robot. This includes combining data from several modalities together with the context of the situation and background knowledge. Current approaches to communication typically rely only on a single modality or are often very rigid and not robust to missing, misaligned, or noisy data. In this paper, we propose a novel method that takes inspiration from sensor fusion approaches to combine uncertain information from multiple modalities and enhance it with situational awareness (e.g., considering object properties or the scene setup). We first evaluate the proposed solution on simulated bimodal datasets (gestures and language) and show by several ablation experiments the importance of various components of the system and its robustness to noisy, missing, or misaligned observations. Then we implement and evaluate the model on the real setup. In human-robot interaction, we must also consider whether the selected action is probable enough to be executed or if we should better query humans for clarification. For these purposes, we enhance our model with adaptive entropy-based thresholding that detects the appropriate thresholds for different types of interaction showing similar performance as fine-tuned fixed thresholds.
Read more4/3/2024
0
No More Mumbles: Enhancing Robot Intelligibility through Speech Adaptation
Qiaoqiao Ren, Yuanbo Hou, Dick Botteldooren, Tony Belpaeme
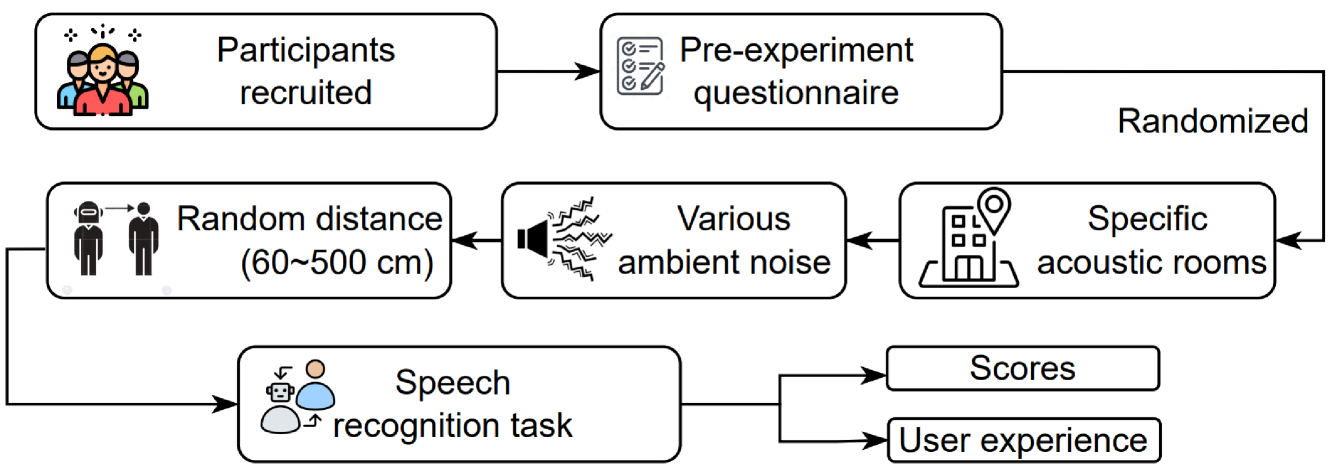
Spoken language interaction is at the heart of interpersonal communication, and people flexibly adapt their speech to different individuals and environments. It is surprising that robots, and by extension other digital devices, are not equipped to adapt their speech and instead rely on fixed speech parameters, which often hinder comprehension by the user. We conducted a speech comprehension study involving 39 participants who were exposed to different environmental and contextual conditions. During the experiment, the robot articulated words using different vocal parameters, and the participants were tasked with both recognising the spoken words and rating their subjective impression of the robot's speech. The experiment's primary outcome shows that spaces with good acoustic quality positively correlate with intelligibility and user experience. However, increasing the distance between the user and the robot exacerbated the user experience, while distracting background sounds significantly reduced speech recognition accuracy and user satisfaction. We next built an adaptive voice for the robot. For this, the robot needs to know how difficult it is for a user to understand spoken language in a particular setting. We present a prediction model that rates how annoying the ambient acoustic environment is and, consequentially, how hard it is to understand someone in this setting. Then, we develop a convolutional neural network model to adapt the robot's speech parameters to different users and spaces, while taking into account the influence of ambient acoustics on intelligibility. Finally, we present an evaluation with 27 users, demonstrating superior intelligibility and user experience with adaptive voice parameters compared to fixed voice.
Read more5/17/2024