Learning to Manipulate Anywhere: A Visual Generalizable Framework For Reinforcement Learning

0

Sign in to get full access
Overview
- Presents a framework for reinforcement learning that enables visual generalization of manipulation tasks
- Focuses on learning diverse manipulation skills in complex environments
- Aims to develop agents that can learn to manipulate objects in novel situations
Plain English Explanation
This research paper introduces a new framework for reinforcement learning that allows agents to visually generalize and learn a variety of manipulation skills. The key idea is to enable these agents to perform complex tasks in dynamic, real-world environments, rather than being limited to specific, predefined scenarios.
The framework works by training the agents on a diverse set of manipulation tasks, using both visual and proprioceptive (self-sensory) information. This allows the agents to learn general manipulation capabilities that can then be applied to novel situations, rather than being tied to a narrow set of predefined actions.
The researchers demonstrate the effectiveness of their approach through experiments in simulated environments, showing that the trained agents can successfully manipulate objects in complex settings. This represents an important step towards developing robotic systems that can flexibly adapt to a wide range of real-world tasks and environments.
Technical Explanation
The proposed framework consists of several key components:
- Visual Encoder: This module takes in visual observations from the environment and encodes them into a compact, meaningful representation.
- Proprioceptive Encoder: This module processes the agent's self-sensory information, such as joint positions and velocities.
- Manipulation Policy: This component, which is trained using reinforcement learning, learns to map the encoded visual and proprioceptive inputs to appropriate manipulation actions.
The training process involves exposing the agent to a diverse set of manipulation tasks, each with its own visual and physical characteristics. This allows the agent to learn general manipulation skills, rather than being specialized for a particular task or environment.
The researchers evaluate their framework on a range of simulated manipulation tasks, including object grasping, pushing, and stacking. The results demonstrate that the trained agents are able to successfully manipulate objects in novel situations, outperforming baseline approaches that rely on more specialized learning.
Critical Analysis
The proposed framework represents an important step towards developing more flexible and adaptable robotic systems. By focusing on visual generalization and learning diverse manipulation skills, the researchers have addressed a key limitation of many existing approaches, which tend to be specialized for particular tasks or environments.
However, the paper also acknowledges several limitations and areas for future work. For example, the evaluation is still conducted in simulated environments, and it remains to be seen how well the framework will transfer to real-world robotic systems. Additionally, the paper does not explore the scalability of the approach to more complex, long-horizon manipulation tasks.
Further research is needed to address these limitations and explore the broader implications of this work. Potential future directions could include incorporating more advanced learning techniques, exploring the framework's performance on more diverse and challenging manipulation tasks, and investigating its potential applications in real-world robotics and automation.
Conclusion
This research paper presents a novel framework for reinforcement learning that enables visual generalization of manipulation tasks. By training agents on a diverse set of manipulation skills, the framework allows them to adapt and perform complex tasks in dynamic, real-world environments.
The promising results demonstrated in simulated experiments suggest that this approach could be a significant step towards developing more flexible and capable robotic systems. Further research is needed to address the limitations and explore the broader implications of this work, but the core ideas presented in this paper represent an important contribution to the field of robotic manipulation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning to Manipulate Anywhere: A Visual Generalizable Framework For Reinforcement Learning
Zhecheng Yuan, Tianming Wei, Shuiqi Cheng, Gu Zhang, Yuanpei Chen, Huazhe Xu
Can we endow visuomotor robots with generalization capabilities to operate in diverse open-world scenarios? In this paper, we propose textbf{Maniwhere}, a generalizable framework tailored for visual reinforcement learning, enabling the trained robot policies to generalize across a combination of multiple visual disturbance types. Specifically, we introduce a multi-view representation learning approach fused with Spatial Transformer Network (STN) module to capture shared semantic information and correspondences among different viewpoints. In addition, we employ a curriculum-based randomization and augmentation approach to stabilize the RL training process and strengthen the visual generalization ability. To exhibit the effectiveness of Maniwhere, we meticulously design 8 tasks encompassing articulate objects, bi-manual, and dexterous hand manipulation tasks, demonstrating Maniwhere's strong visual generalization and sim2real transfer abilities across 3 hardware platforms. Our experiments show that Maniwhere significantly outperforms existing state-of-the-art methods. Videos are provided at https://gemcollector.github.io/maniwhere/.
Read more7/23/2024
❗
0
Ag2Manip: Learning Novel Manipulation Skills with Agent-Agnostic Visual and Action Representations
Puhao Li, Tengyu Liu, Yuyang Li, Muzhi Han, Haoran Geng, Shu Wang, Yixin Zhu, Song-Chun Zhu, Siyuan Huang
Autonomous robotic systems capable of learning novel manipulation tasks are poised to transform industries from manufacturing to service automation. However, modern methods (e.g., VIP and R3M) still face significant hurdles, notably the domain gap among robotic embodiments and the sparsity of successful task executions within specific action spaces, resulting in misaligned and ambiguous task representations. We introduce Ag2Manip (Agent-Agnostic representations for Manipulation), a framework aimed at surmounting these challenges through two key innovations: a novel agent-agnostic visual representation derived from human manipulation videos, with the specifics of embodiments obscured to enhance generalizability; and an agent-agnostic action representation abstracting a robot's kinematics to a universal agent proxy, emphasizing crucial interactions between end-effector and object. Ag2Manip's empirical validation across simulated benchmarks like FrankaKitchen, ManiSkill, and PartManip shows a 325% increase in performance, achieved without domain-specific demonstrations. Ablation studies underline the essential contributions of the visual and action representations to this success. Extending our evaluations to the real world, Ag2Manip significantly improves imitation learning success rates from 50% to 77.5%, demonstrating its effectiveness and generalizability across both simulated and physical environments.
Read more4/29/2024

0
Vision-based Manipulation from Single Human Video with Open-World Object Graphs
Yifeng Zhu, Arisrei Lim, Peter Stone, Yuke Zhu
We present an object-centric approach to empower robots to learn vision-based manipulation skills from human videos. We investigate the problem of imitating robot manipulation from a single human video in the open-world setting, where a robot must learn to manipulate novel objects from one video demonstration. We introduce ORION, an algorithm that tackles the problem by extracting an object-centric manipulation plan from a single RGB-D video and deriving a policy that conditions on the extracted plan. Our method enables the robot to learn from videos captured by daily mobile devices such as an iPad and generalize the policies to deployment environments with varying visual backgrounds, camera angles, spatial layouts, and novel object instances. We systematically evaluate our method on both short-horizon and long-horizon tasks, demonstrating the efficacy of ORION in learning from a single human video in the open world. Videos can be found in the project website https://ut-austin-rpl.github.io/ORION-release.
Read more5/31/2024
0
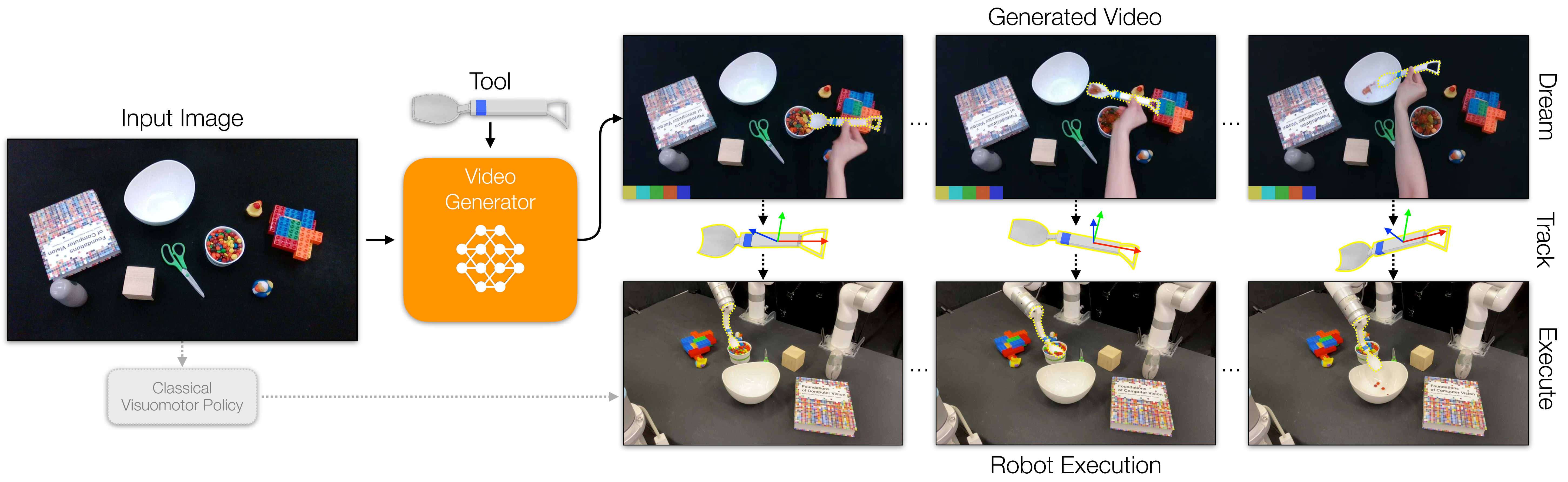
Dreamitate: Real-World Visuomotor Policy Learning via Video Generation
Junbang Liang, Ruoshi Liu, Ege Ozguroglu, Sruthi Sudhakar, Achal Dave, Pavel Tokmakov, Shuran Song, Carl Vondrick
A key challenge in manipulation is learning a policy that can robustly generalize to diverse visual environments. A promising mechanism for learning robust policies is to leverage video generative models, which are pretrained on large-scale datasets of internet videos. In this paper, we propose a visuomotor policy learning framework that fine-tunes a video diffusion model on human demonstrations of a given task. At test time, we generate an example of an execution of the task conditioned on images of a novel scene, and use this synthesized execution directly to control the robot. Our key insight is that using common tools allows us to effortlessly bridge the embodiment gap between the human hand and the robot manipulator. We evaluate our approach on four tasks of increasing complexity and demonstrate that harnessing internet-scale generative models allows the learned policy to achieve a significantly higher degree of generalization than existing behavior cloning approaches.
Read more6/26/2024