Learning Visual Quadrupedal Loco-Manipulation from Demonstrations
2403.20328
0
0

Abstract
Quadruped robots are progressively being integrated into human environments. Despite the growing locomotion capabilities of quadrupedal robots, their interaction with objects in realistic scenes is still limited. While additional robotic arms on quadrupedal robots enable manipulating objects, they are sometimes redundant given that a quadruped robot is essentially a mobile unit equipped with four limbs, each possessing 3 degrees of freedom (DoFs). Hence, we aim to empower a quadruped robot to execute real-world manipulation tasks using only its legs. We decompose the loco-manipulation process into a low-level reinforcement learning (RL)-based controller and a high-level Behavior Cloning (BC)-based planner. By parameterizing the manipulation trajectory, we synchronize the efforts of the upper and lower layers, thereby leveraging the advantages of both RL and BC. Our approach is validated through simulations and real-world experiments, demonstrating the robot's ability to perform tasks that demand mobility and high precision, such as lifting a basket from the ground while moving, closing a dishwasher, pressing a button, and pushing a door. Project website: https://zhengmaohe.github.io/leg-manip
Create account to get full access
Overview
- This paper explores using demonstrations to teach quadrupedal robots (four-legged robots) how to perform complex loco-manipulation tasks, which involve locomotion and manipulation together.
- The researchers developed a deep learning approach that allows quadrupedal robots to learn these skills by observing human demonstrations.
- The goal is to enable quadrupedal robots to perform a wider range of useful tasks in the real world, by learning from expert human demonstrations.
Plain English Explanation
The paper looks at teaching four-legged robots, like robotic dogs, how to do complex movements that involve both walking (locomotion) and using their "hands" (manipulating objects). Typically, programming robots to do these types of combined movements is very challenging.
The researchers tried a different approach - having the robots learn these skills by watching demonstrations performed by humans. They developed a deep learning system that allows the robots to observe the human demonstrations and then figure out how to mimic those movements on their own.
The key idea is that by learning from expert human demonstrations, the robots can acquire a wide range of useful real-world skills, without the researchers having to program every little detail. The robots essentially learn by watching and imitating, similar to how humans and animals learn new physical skills.
This could enable quadrupedal robots to take on a broader range of tasks, like navigating complex environments while also manipulating objects, which could be valuable for applications like search and rescue, construction, or household assistance.
Technical Explanation
The paper presents a deep learning approach for enabling quadrupedal robots to learn loco-manipulation skills from human demonstrations. The core components include:
- A deep neural network architecture that takes in visual observations of the human demonstrations and outputs target joint positions for the robot to mimic the demonstrated movements.
- A training process that involves collecting human demonstration data, training the neural network model, and then deploying the trained model on the physical robot.
- Experiments evaluating the system's ability to learn a variety of loco-manipulation tasks, including navigating environments while manipulating objects.
The key technical insight is that by leveraging deep learning to extract relevant features from the visual demonstrations, the robots can learn complex real-world skills without requiring detailed manual programming. The neural network effectively acts as a "translator" between the human demonstrations and the robot's own kinematics and control.
The paper demonstrates successful transfer of loco-manipulation skills across different robot platforms and environments, suggesting the generalizability of the approach. However, the authors also note limitations around handling unseen scenarios and potential safety/reliability concerns that require further research.
Critical Analysis
The paper presents a promising approach for enhancing the capabilities of quadrupedal robots through imitation learning from human demonstrations. The ability to learn complex loco-manipulation skills in this way is an important step towards more versatile and autonomous robots.
That said, the experiments are conducted in relatively constrained and simplified environments, and it's not clear how well the approach would scale to more complex real-world settings with significant clutter, varying terrain, and diverse manipulation tasks. Extensive further testing and validation would be needed to ensure the reliability and safety of such a system operating in the real world.
Additionally, the paper does not deeply address potential issues around the fidelity and consistency of human demonstrations, which could impact the robot's ability to accurately learn the intended skills. Techniques for addressing noisy or suboptimal demonstration data may need to be incorporated.
Overall, the work represents an interesting and promising direction, but there are still significant challenges around robustness, generalization, and safety that would need to be solved before deploying such a system in high-stakes real-world applications. Continued research in this area could yield valuable advances in robot versatility and autonomy.
Conclusion
This paper explores a novel approach for teaching quadrupedal robots complex loco-manipulation skills by having them learn from human demonstrations. The deep learning-based system allows the robots to observe and then mimic the demonstrated movements, without requiring detailed manual programming.
The results suggest this technique could enable quadrupedal robots to acquire a broader range of useful real-world capabilities, by leveraging the expertise of human demonstrators. While there are still challenges around robustness and safety to address, this work represents an important step towards more versatile and autonomous robots that can assist with a variety of tasks in complex environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Long-horizon Locomotion and Manipulation on a Quadrupedal Robot with Large Language Models
Yutao Ouyang, Jinhan Li, Yunfei Li, Zhongyu Li, Chao Yu, Koushil Sreenath, Yi Wu
0
0
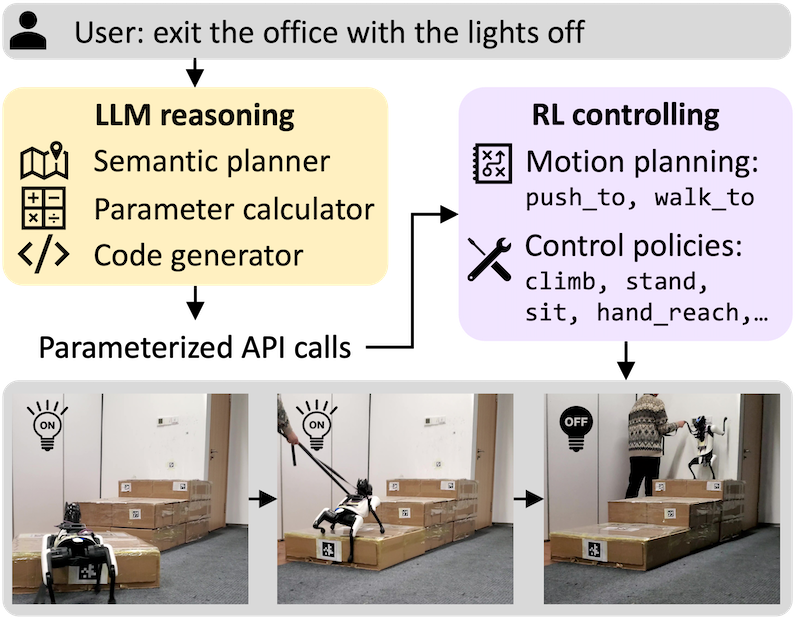
We present a large language model (LLM) based system to empower quadrupedal robots with problem-solving abilities for long-horizon tasks beyond short-term motions. Long-horizon tasks for quadrupeds are challenging since they require both a high-level understanding of the semantics of the problem for task planning and a broad range of locomotion and manipulation skills to interact with the environment. Our system builds a high-level reasoning layer with large language models, which generates hybrid discrete-continuous plans as robot code from task descriptions. It comprises multiple LLM agents: a semantic planner for sketching a plan, a parameter calculator for predicting arguments in the plan, and a code generator to convert the plan into executable robot code. At the low level, we adopt reinforcement learning to train a set of motion planning and control skills to unleash the flexibility of quadrupeds for rich environment interactions. Our system is tested on long-horizon tasks that are infeasible to complete with one single skill. Simulation and real-world experiments show that it successfully figures out multi-step strategies and demonstrates non-trivial behaviors, including building tools or notifying a human for help.
4/9/2024

HYPERmotion: Learning Hybrid Behavior Planning for Autonomous Loco-manipulation
Jin Wang, Rui Dai, Weijie Wang, Luca Rossini, Francesco Ruscelli, Nikos Tsagarakis
0
0
Enabling robots to autonomously perform hybrid motions in diverse environments can be beneficial for long-horizon tasks such as material handling, household chores, and work assistance. This requires extensive exploitation of intrinsic motion capabilities, extraction of affordances from rich environmental information, and planning of physical interaction behaviors. Despite recent progress has demonstrated impressive humanoid whole-body control abilities, they struggle to achieve versatility and adaptability for new tasks. In this work, we propose HYPERmotion, a framework that learns, selects and plans behaviors based on tasks in different scenarios. We combine reinforcement learning with whole-body optimization to generate motion for 38 actuated joints and create a motion library to store the learned skills. We apply the planning and reasoning features of the large language models (LLMs) to complex loco-manipulation tasks, constructing a hierarchical task graph that comprises a series of primitive behaviors to bridge lower-level execution with higher-level planning. By leveraging the interaction of distilled spatial geometry and 2D observation with a visual language model (VLM) to ground knowledge into a robotic morphology selector to choose appropriate actions in single- or dual-arm, legged or wheeled locomotion. Experiments in simulation and real-world show that learned motions can efficiently adapt to new tasks, demonstrating high autonomy from free-text commands in unstructured scenes. Videos and website: hy-motion.github.io/
6/24/2024
Visual Whole-Body Control for Legged Loco-Manipulation
Minghuan Liu, Zixuan Chen, Xuxin Cheng, Yandong Ji, Ri-Zhao Qiu, Ruihan Yang, Xiaolong Wang
0
0
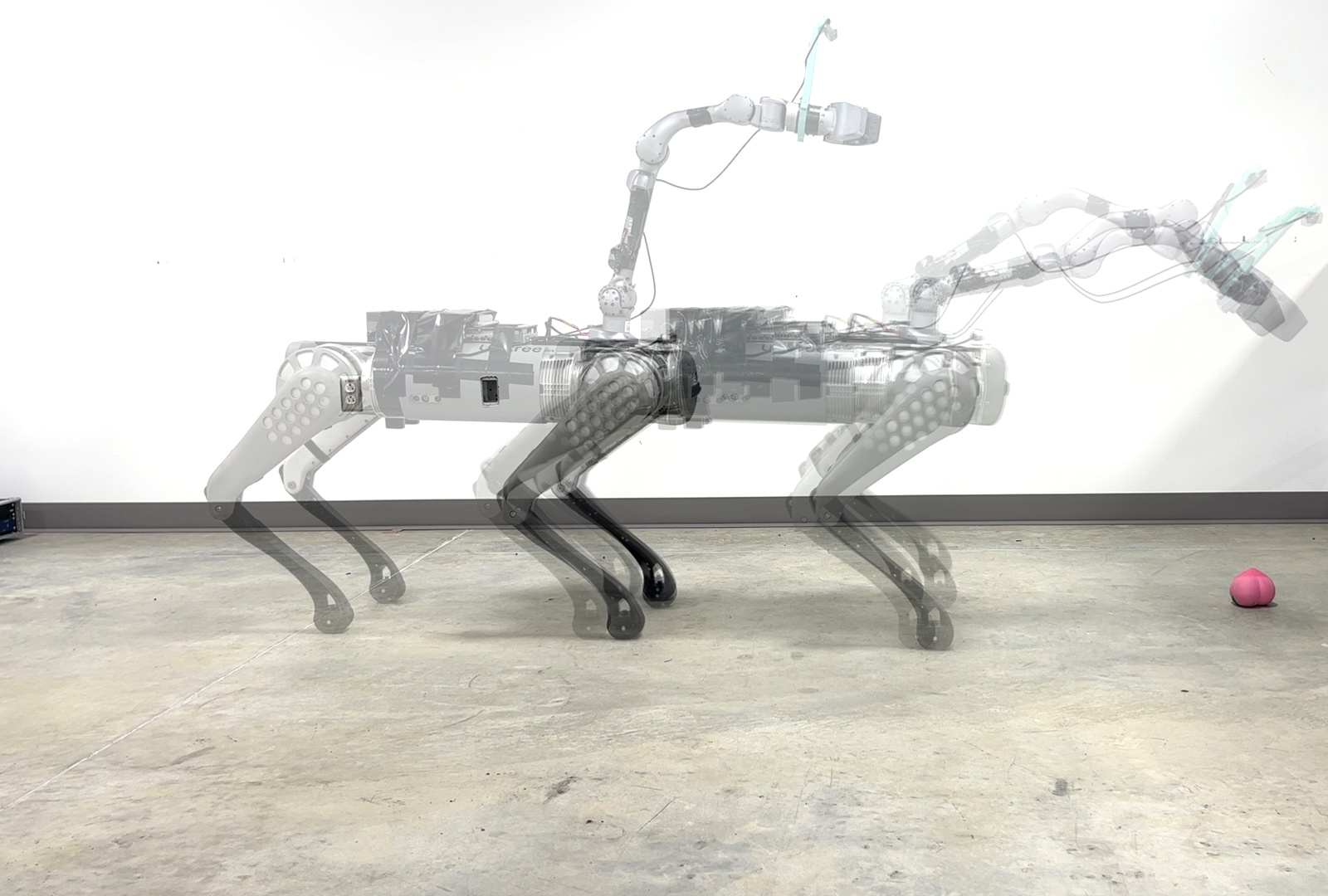
We study the problem of mobile manipulation using legged robots equipped with an arm, namely legged loco-manipulation. The robot legs, while usually utilized for mobility, offer an opportunity to amplify the manipulation capabilities by conducting whole-body control. That is, the robot can control the legs and the arm at the same time to extend its workspace. We propose a framework that can conduct the whole-body control autonomously with visual observations. Our approach, namely Visual Whole-Body Control(VBC), is composed of a low-level policy using all degrees of freedom to track the body velocities along with the end-effector position, and a high-level policy proposing the velocities and end-effector position based on visual inputs. We train both levels of policies in simulation and perform Sim2Real transfer for real robot deployment. We perform extensive experiments and show significant improvements over baselines in picking up diverse objects in different configurations (heights, locations, orientations) and environments.
5/15/2024
➖
Learning-based legged locomotion; state of the art and future perspectives
Sehoon Ha, Joonho Lee, Michiel van de Panne, Zhaoming Xie, Wenhao Yu, Majid Khadiv
0
0
Legged locomotion holds the premise of universal mobility, a critical capability for many real-world robotic applications. Both model-based and learning-based approaches have advanced the field of legged locomotion in the past three decades. In recent years, however, a number of factors have dramatically accelerated progress in learning-based methods, including the rise of deep learning, rapid progress in simulating robotic systems, and the availability of high-performance and affordable hardware. This article aims to give a brief history of the field, to summarize recent efforts in learning locomotion skills for quadrupeds, and to provide researchers new to the area with an understanding of the key issues involved. With the recent proliferation of humanoid robots, we further outline the rapid rise of analogous methods for bipedal locomotion. We conclude with a discussion of open problems as well as related societal impact.
6/4/2024