Lessons Learned: The Evolution of an Undergraduate Robotics Course in Computer Science
2404.18012
0
0
🤯
Abstract
Seven years ago (2016), we began integrating Robotics into our Computer Science curriculum. This paper explores the mission, initial goals and objectives, specific choices we made along the way, and why and outcomes. Of course, we were not the first to do so. Our contribution in this paper is to describe a seven-year experience in the hope that others going down this road will benefit, perhaps avoiding some missteps and dead-ends. We offer our answers to many questions that anyone undertaking bootstrapping a new robotics program may have to deal with. At the end of the paper, we discuss a set of lessons learned, including striking the right balance between depth and breadth in syllabus design and material organization, the significance of utilizing physical robots and criteria for selecting a suitable robotics platform, insights into the scope and design of a robotics lab, the necessity of standardizing hardware and software configurations, along with implementation methods, and strategies for preparing students for the steep learning curve.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- Seven years ago, this institution began integrating Robotics into their Computer Science curriculum.
- The paper explores the mission, initial goals and objectives, specific choices made, and outcomes of this integration.
- The authors aim to share their seven-year experience in the hope that others embarking on a similar journey can benefit and potentially avoid some pitfalls.
- The paper addresses many questions that anyone starting a new robotics program may have to deal with.
- Key topics include: [https://aimodels.fyi/papers/arxiv/from-lab-to-theater-unconventional-field-robotics]syllabus design and material organization, [https://aimodels.fyi/papers/arxiv/modular-resilient-scalable-system-design-approaches-lessons]selecting a suitable robotics platform, [https://aimodels.fyi/papers/arxiv/framework-learning-reusing-robotic-skills]setting up a robotics lab, [https://aimodels.fyi/papers/arxiv/towards-robust-soft-baby-robot-rich-interaction]standardizing hardware and software configurations, and [https://aimodels.fyi/papers/arxiv/robust-221-bugs-robot-operating-system]preparing students for the steep learning curve.
Plain English Explanation
Seven years ago, this university decided to incorporate robotics into their computer science program. The researchers wanted to share their experiences and lessons learned from this process, in the hope that it can help others who are considering a similar initiative.
The paper discusses the overall goals and objectives they had in mind when first introducing robotics, and the specific decisions they made along the way. This includes things like how they designed the curriculum to balance depth and breadth, how they chose the right robotics hardware and software platforms for their needs, and how they set up a dedicated robotics lab for students to work in.
Additionally, the researchers highlight the importance of standardizing the hardware and software configurations across the program, and strategies they used to help prepare students for the steep learning curve involved in working with robots. The paper aims to share these hard-won insights so that other institutions can benefit from their experiences, both positive and negative.
Technical Explanation
The paper describes a seven-year initiative to integrate robotics into a computer science curriculum. The researchers outline the mission, initial goals and objectives, as well as the specific choices made during the implementation process and the resulting outcomes.
The authors begin by discussing the curriculum design, including striking the right balance between depth and breadth of robotics concepts covered. They also address the significance of utilizing physical robots, and the criteria they used to select a suitable robotics platform for their needs.
In terms of the robotics lab setup, the paper explores insights into the necessary scope and design considerations. A key focus is the importance of standardizing both the hardware and software configurations across the program, along with effective implementation methods.
Finally, the researchers share strategies they employed to prepare students for the steep learning curve associated with robotics. This includes techniques to scaffold the material and provide adequate support throughout the learning process.
Throughout the paper, the authors aim to share their lessons learned in the hope that other institutions embarking on similar initiatives can benefit and potentially avoid some of the challenges they faced.
Critical Analysis
The paper provides a comprehensive overview of the authors' experience in integrating robotics into a computer science curriculum, which can be valuable for other institutions considering a similar path. By openly sharing the successes, challenges, and lessons learned, the researchers demonstrate a commendable commitment to supporting the broader academic community.
One potential area for further exploration could be the specific assessment methods used to evaluate the program's effectiveness and student learning outcomes. The paper alludes to positive results, but more detailed data and analysis on the impact of the robotics integration would strengthen the research.
Additionally, while the paper acknowledges that they were not the first to undertake such an initiative, it would be interesting to see how their approach compares to other published case studies in the field. [https://aimodels.fyi/papers/arxiv/from-lab-to-theater-unconventional-field-robotics]Exploring the unique aspects of their program and [https://aimodels.fyi/papers/arxiv/modular-resilient-scalable-system-design-approaches-lessons]how it complements or differs from existing models could provide additional insights.
Overall, the paper offers a thoughtful and practical guide for educators looking to integrate robotics into their computer science curricula. The authors' transparency and willingness to share their experiences is commendable and can serve as a valuable resource for the broader academic community.
Conclusion
This paper provides a detailed account of a seven-year initiative to integrate robotics into a computer science program. By openly sharing their mission, goals, implementation choices, and outcomes, the authors aim to support other institutions embarking on similar endeavors.
The key takeaways include insights on curriculum design, robotics platform selection, lab setup, hardware and software standardization, and strategies for preparing students. These lessons learned can help educators avoid potential pitfalls and implement a more effective robotics program.
Overall, the paper demonstrates the authors' commitment to advancing robotics education and their desire to contribute to the broader academic community. Their experiences and recommendations can serve as a valuable reference for other universities looking to incorporate robotics into their computer science curricula.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
From the Lab to the Theater: An Unconventional Field Robotics Journey
Ali Imran, Vivek Shankar Varadharajan, Rafael Gomes Braga, Yann Bouteiller, Abdalwhab Bakheet Mohamed Abdalwhab, Matthis Di-Giacomo, Alexandra Mercader, Giovanni Beltrame, David St-Onge
0
0
Artistic performances involving robotic systems present unique technical challenges akin to those encountered in other field deployments. In this paper, we delve into the orchestration of robotic artistic performances, focusing on the complexities inherent in communication protocols and localization methods. Through our case studies and experimental insights, we demonstrate the breadth of technical requirements for this type of deployment, and, most importantly, the significant contributions of working closely with non-experts.
4/23/2024
Modular, Resilient, and Scalable System Design Approaches -- Lessons learned in the years after DARPA Subterranean Challenge
Prasanna Sriganesh, James Maier, Adam Johnson, Burhanuddin Shirose, Rohan Chandrasekar, Charles Noren, Joshua Spisak, Ryan Darnley, Bhaskar Vundurthy, Matthew Travers
0
0
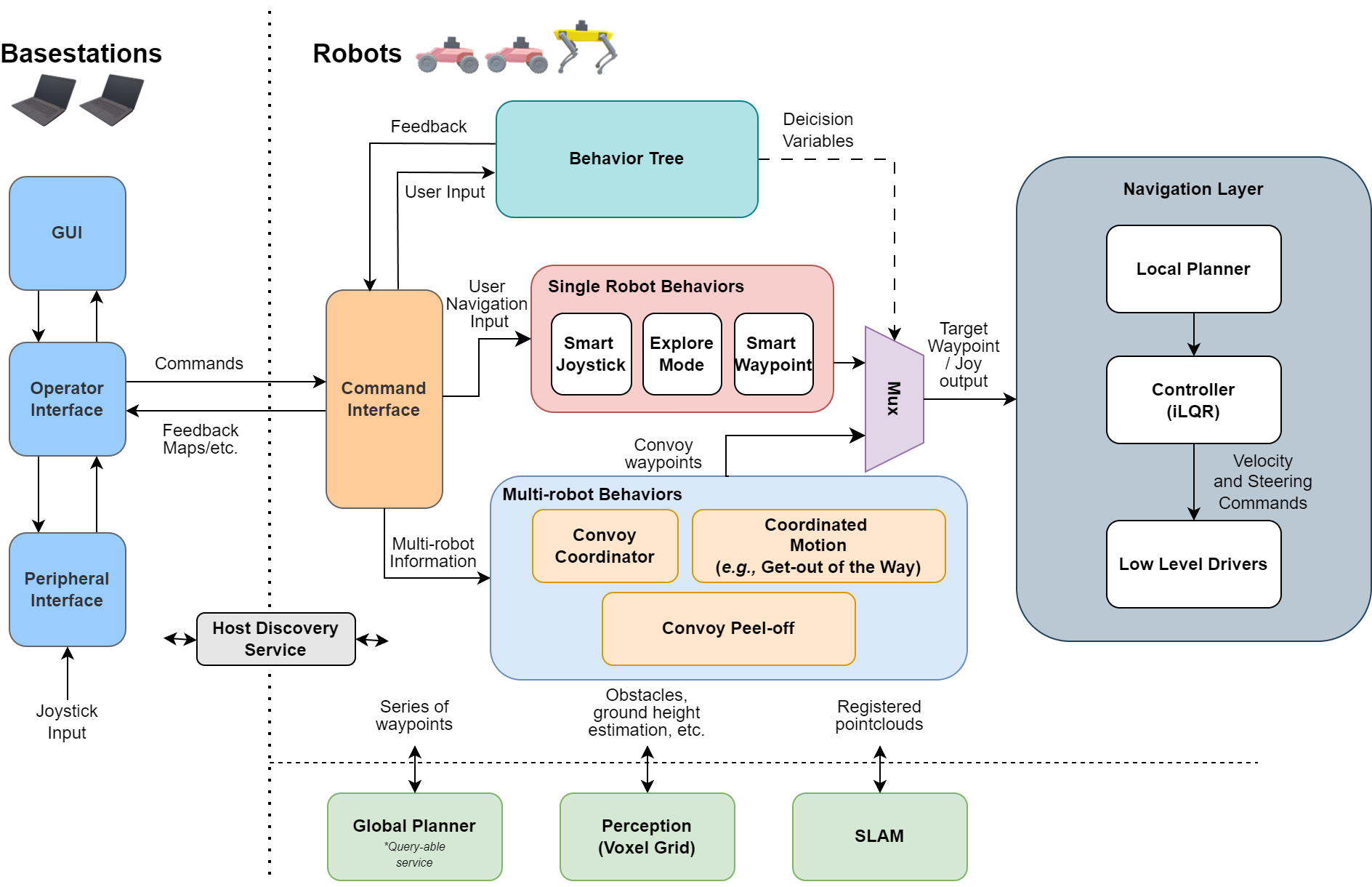
Field robotics applications, such as search and rescue, involve robots operating in large, unknown areas. These environments present unique challenges that compound the difficulties faced by a robot operator. The use of multi-robot teams, assisted by carefully designed autonomy, help reduce operator workload and allow the operator to effectively coordinate robot capabilities. In this work, we present a system architecture designed to optimize both robot autonomy and the operator experience in multi-robot scenarios. Drawing on lessons learned from our team's participation in the DARPA SubT Challenge, our architecture emphasizes modularity and interoperability. We empower the operator by allowing for adjustable levels of autonomy (sliding mode autonomy). We enhance the operator experience by using intuitive, adaptive interfaces that suggest context-aware actions to simplify control. Finally, we describe how the proposed architecture enables streamlined development of new capabilities for effective deployment of robot autonomy in the field.
4/30/2024
🔄
Transfer Learning in Robotics: An Upcoming Breakthrough? A Review of Promises and Challenges
No'emie Jaquier, Michael C. Welle, Andrej Gams, Kunpeng Yao, Bernardo Fichera, Aude Billard, Alev{s} Ude, Tamim Asfour, Danica Kragic
0
0
Transfer learning is a conceptually-enticing paradigm in pursuit of truly intelligent embodied agents. The core concept -- reusing prior knowledge to learn in and from novel situations -- is successfully leveraged by humans to handle novel situations. In recent years, transfer learning has received renewed interest from the community from different perspectives, including imitation learning, domain adaptation, and transfer of experience from simulation to the real world, among others. In this paper, we unify the concept of transfer learning in robotics and provide the first taxonomy of its kind considering the key concepts of robot, task, and environment. Through a review of the promises and challenges in the field, we identify the need of transferring at different abstraction levels, the need of quantifying the transfer gap and the quality of transfer, as well as the dangers of negative transfer. Via this position paper, we hope to channel the effort of the community towards the most significant roadblocks to realize the full potential of transfer learning in robotics.
5/3/2024
📉
A Framework for Learning and Reusing Robotic Skills
Brendan Hertel, Nhu Tran, Meriem Elkoudi, Reza Azadeh
0
0
In this paper, we present our work in progress towards creating a library of motion primitives. This library facilitates easier and more intuitive learning and reusing of robotic skills. Users can teach robots complex skills through Learning from Demonstration, which is automatically segmented into primitives and stored in clusters of similar skills. We propose a novel multimodal segmentation method as well as a novel trajectory clustering method. Then, when needed for reuse, we transform primitives into new environments using trajectory editing. We present simulated results for our framework with demonstrations taken on real-world robots.
4/30/2024