Transfer Learning in Robotics: An Upcoming Breakthrough? A Review of Promises and Challenges

0
🔄
Sign in to get full access
Overview
- Transfer learning is a promising approach for developing intelligent embodied agents
- The core idea is reusing prior knowledge to learn in and from novel situations, which is how humans often handle new challenges
- Transfer learning has gained renewed interest in various areas, including imitation learning, domain adaptation, and transferring from simulation to the real world
Plain English Explanation
Transfer learning is a concept that could help create truly intelligent robots and AI systems. The key idea is that these systems can reuse knowledge they've gained from previous experiences to learn new things more quickly. This is similar to how humans can often handle novel situations by drawing on what they've learned before.
In recent years, transfer learning has been studied from different perspectives, such as imitation learning, domain adaptation, and transferring knowledge from simulation to the real world. This paper aims to provide a unified view of transfer learning in robotics and a taxonomy to help categorize the different approaches.
Technical Explanation
This paper presents a comprehensive review of transfer learning in robotics. The authors propose a taxonomy that considers the key elements of transfer learning: the robot, the task, and the environment. They discuss the promises and challenges in this field, highlighting the need to transfer knowledge at different levels of abstraction, quantify the transfer gap and quality, and avoid negative transfer.
The paper emphasizes the importance of developing techniques that can effectively leverage prior knowledge to learn in novel situations. This could lead to more adaptable and capable robotic systems that can handle a wider range of tasks and environments.
Critical Analysis
The authors provide a comprehensive overview of the transfer learning landscape in robotics, identifying key research directions and challenges. However, the paper does not delve into the technical details of specific transfer learning approaches or provide in-depth analysis of their strengths and weaknesses.
While the proposed taxonomy is a useful framework, the paper could have benefited from more concrete examples of how different transfer learning techniques can be applied in robotics. Additionally, the authors could have discussed the potential ethical implications of transfer learning, such as the risks of reinforcing biases or the challenges of ensuring the safe and reliable deployment of these systems.
Conclusion
This position paper advances the understanding of transfer learning in robotics by unifying the concept and proposing a taxonomy to categorize the different approaches. By highlighting the promises and challenges in this field, the authors aim to guide the research community towards addressing the most significant roadblocks to realizing the full potential of transfer learning for intelligent embodied agents.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔄
0
Transfer Learning in Robotics: An Upcoming Breakthrough? A Review of Promises and Challenges
No'emie Jaquier, Michael C. Welle, Andrej Gams, Kunpeng Yao, Bernardo Fichera, Aude Billard, Alev{s} Ude, Tamim Asfour, Danica Kragic
Transfer learning is a conceptually-enticing paradigm in pursuit of truly intelligent embodied agents. The core concept -- reusing prior knowledge to learn in and from novel situations -- is successfully leveraged by humans to handle novel situations. In recent years, transfer learning has received renewed interest from the community from different perspectives, including imitation learning, domain adaptation, and transfer of experience from simulation to the real world, among others. In this paper, we unify the concept of transfer learning in robotics and provide the first taxonomy of its kind considering the key concepts of robot, task, and environment. Through a review of the promises and challenges in the field, we identify the need of transferring at different abstraction levels, the need of quantifying the transfer gap and the quality of transfer, as well as the dangers of negative transfer. Via this position paper, we hope to channel the effort of the community towards the most significant roadblocks to realize the full potential of transfer learning in robotics.
Read more5/3/2024
0
Transfer Learning Study of Motion Transformer-based Trajectory Predictions
Lars Ullrich, Alex McMaster, Knut Graichen
Trajectory planning in autonomous driving is highly dependent on predicting the emergent behavior of other road users. Learning-based methods are currently showing impressive results in simulation-based challenges, with transformer-based architectures technologically leading the way. Ultimately, however, predictions are needed in the real world. In addition to the shifts from simulation to the real world, many vehicle- and country-specific shifts, i.e. differences in sensor systems, fusion and perception algorithms as well as traffic rules and laws, are on the agenda. Since models that can cover all system setups and design domains at once are not yet foreseeable, model adaptation plays a central role. Therefore, a simulation-based study on transfer learning techniques is conducted on basis of a transformer-based model. Furthermore, the study aims to provide insights into possible trade-offs between computational time and performance to support effective transfers into the real world.
Read more8/9/2024

0
Knowledge Transfer for Cross-Domain Reinforcement Learning: A Systematic Review
Sergio A. Serrano, Jose Martinez-Carranza, L. Enrique Sucar
Reinforcement Learning (RL) provides a framework in which agents can be trained, via trial and error, to solve complex decision-making problems. Learning with little supervision causes RL methods to require large amounts of data, which renders them too expensive for many applications (e.g. robotics). By reusing knowledge from a different task, knowledge transfer methods present an alternative to reduce the training time in RL. Given how severe data scarcity can be, there has been a growing interest for methods capable of transferring knowledge across different domains (i.e. problems with different representation) due to the flexibility they offer. This review presents a unifying analysis of methods focused on transferring knowledge across different domains. Through a taxonomy based on a transfer-approach categorization, and a characterization of works based on their data-assumption requirements, the objectives of this article are to 1) provide a comprehensive and systematic revision of knowledge transfer methods for the cross-domain RL setting, 2) categorize and characterize these methods to provide an analysis based on relevant features such as their transfer approach and data requirements, and 3) discuss the main challenges regarding cross-domain knowledge transfer, as well as ideas of future directions worth exploring to address these problems.
Read more4/30/2024
0
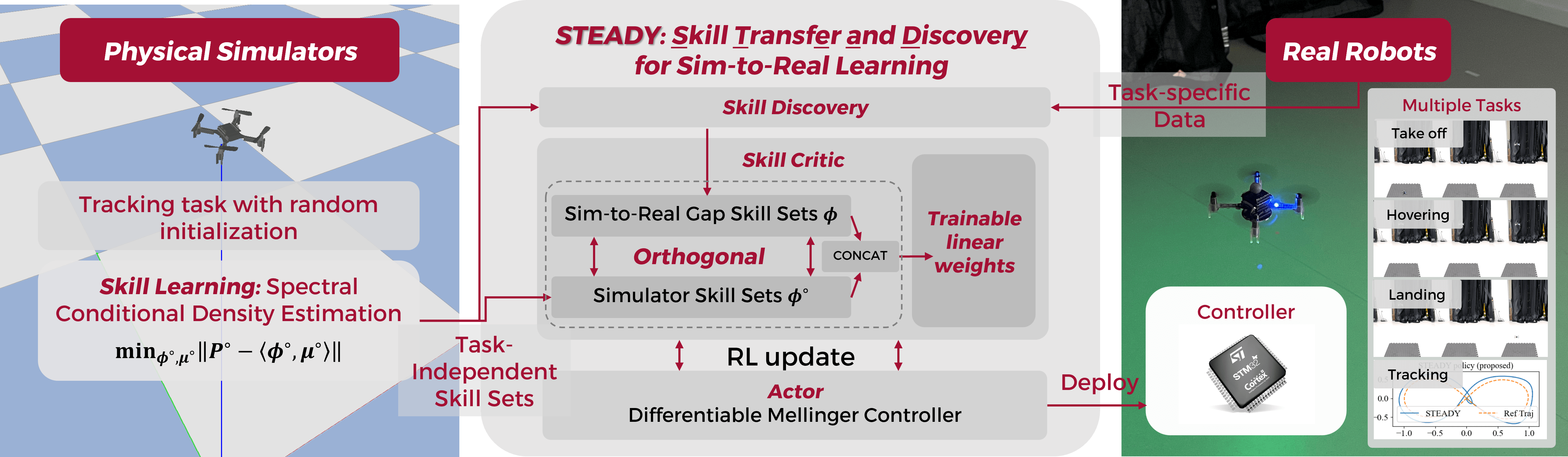
Skill Transfer and Discovery for Sim-to-Real Learning: A Representation-Based Viewpoint
Haitong Ma, Zhaolin Ren, Bo Dai, Na Li
We study sim-to-real skill transfer and discovery in the context of robotics control using representation learning. We draw inspiration from spectral decomposition of Markov decision processes. The spectral decomposition brings about representation that can linearly represent the state-action value function induced by any policies, thus can be regarded as skills. The skill representations are transferable across arbitrary tasks with the same transition dynamics. Moreover, to handle the sim-to-real gap in the dynamics, we propose a skill discovery algorithm that learns new skills caused by the sim-to-real gap from real-world data. We promote the discovery of new skills by enforcing orthogonal constraints between the skills to learn and the skills from simulators, and then synthesize the policy using the enlarged skill sets. We demonstrate our methodology by transferring quadrotor controllers from simulators to Crazyflie 2.1 quadrotors. We show that we can learn the skill representations from a single simulator task and transfer these to multiple different real-world tasks including hovering, taking off, landing and trajectory tracking. Our skill discovery approach helps narrow the sim-to-real gap and improve the real-world controller performance by up to 30.2%.
Read more4/9/2024