Leveraging Counterfactual Paths for Contrastive Explanations of POMDP Policies
2403.19760
0
0
🏋️
Abstract
As humans come to rely on autonomous systems more, ensuring the transparency of such systems is important to their continued adoption. Explainable Artificial Intelligence (XAI) aims to reduce confusion and foster trust in systems by providing explanations of agent behavior. Partially observable Markov decision processes (POMDPs) provide a flexible framework capable of reasoning over transition and state uncertainty, while also being amenable to explanation. This work investigates the use of user-provided counterfactuals to generate contrastive explanations of POMDP policies. Feature expectations are used as a means of contrasting the performance of these policies. We demonstrate our approach in a Search and Rescue (SAR) setting. We analyze and discuss the associated challenges through two case studies.
Create account to get full access
Introduction
The paper discusses the importance of Explainable Artificial Intelligence (XAI) in enabling transparency and trust in AI systems, especially in mission-critical roles such as search and rescue. Partially observable Markov decision processes (POMDPs) provide a flexible framework for reasoning over state and transition uncertainty and lend themselves well to explanations. Contrastive explanations and counterfactuals can help make systems more interpretable and gain the trust of end users.
The authors aim to explore the use of user-given counterfactuals to provide contrastive explanations for POMDP policies in the context of a Search and Rescue (SAR) POMDP example. They provide an overview of explainable planning, which can be organized into model-based algorithm-agnostic and algorithm-specific explanations. Many works have sought to increase the explainability of planning in the context of MDPs by offering contrastive explanations in terms of expected feature occupancy.
POMDPs introduce an added layer of complexity by reasoning over uncertainty in the partially observable state. Several works have explored interactions between the autonomy and the end user to enhance trust, while others provide explanations in terms of the POMDP components. The authors propose a methodology for generating contrastive explanations for a SAR POMDP by contrasting policies against user-proposed counterfactuals via feature expectations.
Methodology
The paper proposes a method for explaining optimal policies in Partially Observable Markov Decision Processes (POMDPs) by comparing them to user-provided counterfactual paths. The approach focuses on the search and rescue (SAR) domain, where a human rescuer collaborates with an autonomous agent to find a missing person.
Key points:
- The user can express a counterfactual path, which is translated into an open-loop policy.
- The performance of the user's policy is compared to the optimal policy to form the basis of an explanation.
- Feature expectations and factored rewards are used to represent the components contributing to the reward, providing insight into the problem objectives satisfied by the algorithm.
- The feature expectation is defined as the expected sum of discounted feature occupancy functions over time, given a policy and initial belief.
- The value of a policy can be expressed as the dot product of feature weights and feature expectations.
- Explanations are generated by calculating feature expectations for both the optimal closed-loop policy and the user's open-loop policy, then translating the differences into plain language.
- This method can be applied to any domain where a user provides a counterfactual policy, as long as feature expectations can be defined and calculated.
The approach aims to provide intuitive explanations for the executed path in the SAR POMDP domain by leveraging the visual nature of the problem and comparing the optimal policy to user-proposed alternatives.
Case Studies
The paper demonstrates an approach for explaining optimal policies in a search and rescue partially observable Markov decision process (SAR POMDP). The robot searches an n x n grid for a partially observable stationary target while visiting regions of interest, subject to a limited battery capacity.
Two case studies are presented:
-
Observable and unobservable objectives: The readily observable objective (cell of interest) and more valuable partially observable objective (hidden target) do not align. Feature expectations show the optimal policy finds the target more often than the user policy, leading to higher value despite visiting the cell of interest less frequently.
-
Resource constraints: Battery constraints prevent reaching a high-reward cell of interest proposed by the user policy. Feature expectations indicate the optimal policy finds the target more often and avoids battery depletion compared to the user policy.
Contrastive explanations comparing feature expectations of the optimal and user policies are proposed to justify the optimal policy in plain language, accounting for uncertainty in target location and problem constraints like limited battery.
Conclusion and Future Direction
The paper presents an approach for explaining paths generated by optimal solutions to POMDP search and rescue problems. The method uses a counterfactual user path as the basis for an open-loop policy, which is contrasted against an optimal policy through feature expectations. However, the approach assumes that the user maintains an open-loop policy that does not change with new information, which may not accurately capture user reasoning. Accounting for policy changes due to new information and the influence of observations on user's reasoning could lead to more effective POMDP explanations. The paper suggests that future methods should consider closed-loop reasoning while requiring limited user input. Additionally, providing proactive explanations of executed paths automatically in anticipation of user confusion could reduce user workload and dependence on domain-specific user feedback.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤖
Beyond One-Size-Fits-All: Adapting Counterfactual Explanations to User Objectives
Orfeas Menis Mastromichalakis, Jason Liartis, Giorgos Stamou
0
0
Explainable Artificial Intelligence (XAI) has emerged as a critical area of research aimed at enhancing the transparency and interpretability of AI systems. Counterfactual Explanations (CFEs) offer valuable insights into the decision-making processes of machine learning algorithms by exploring alternative scenarios where certain factors differ. Despite the growing popularity of CFEs in the XAI community, existing literature often overlooks the diverse needs and objectives of users across different applications and domains, leading to a lack of tailored explanations that adequately address the different use cases. In this paper, we advocate for a nuanced understanding of CFEs, recognizing the variability in desired properties based on user objectives and target applications. We identify three primary user objectives and explore the desired characteristics of CFEs in each case. By addressing these differences, we aim to design more effective and tailored explanations that meet the specific needs of users, thereby enhancing collaboration with AI systems.
4/16/2024
🤿
Counterfactual Explanations for Deep Learning-Based Traffic Forecasting
Rushan Wang, Yanan Xin, Yatao Zhang, Fernando Perez-Cruz, Martin Raubal
0
0
Deep learning models are widely used in traffic forecasting and have achieved state-of-the-art prediction accuracy. However, the black-box nature of those models makes the results difficult to interpret by users. This study aims to leverage an Explainable AI approach, counterfactual explanations, to enhance the explainability and usability of deep learning-based traffic forecasting models. Specifically, the goal is to elucidate relationships between various input contextual features and their corresponding predictions. We present a comprehensive framework that generates counterfactual explanations for traffic forecasting and provides usable insights through the proposed scenario-driven counterfactual explanations. The study first implements a deep learning model to predict traffic speed based on historical traffic data and contextual variables. Counterfactual explanations are then used to illuminate how alterations in these input variables affect predicted outcomes, thereby enhancing the transparency of the deep learning model. We investigated the impact of contextual features on traffic speed prediction under varying spatial and temporal conditions. The scenario-driven counterfactual explanations integrate two types of user-defined constraints, directional and weighting constraints, to tailor the search for counterfactual explanations to specific use cases. These tailored explanations benefit machine learning practitioners who aim to understand the model's learning mechanisms and domain experts who seek insights for real-world applications. The results showcase the effectiveness of counterfactual explanations in revealing traffic patterns learned by deep learning models, showing its potential for interpreting black-box deep learning models used for spatiotemporal predictions in general.
5/2/2024
🤔
Navigating Explanatory Multiverse Through Counterfactual Path Geometry
Kacper Sokol, Edward Small, Yueqing Xuan
0
0
Counterfactual explanations are the de facto standard when tasked with interpreting decisions of (opaque) predictive models. Their generation is often subject to algorithmic and domain-specific constraints -- such as density-based feasibility, and attribute (im)mutability or directionality of change -- that aim to maximise their real-life utility. In addition to desiderata with respect to the counterfactual instance itself, existence of a viable path connecting it with the factual data point, known as algorithmic recourse, has become an important technical consideration. While both of these requirements ensure that the steps of the journey as well as its destination are admissible, current literature neglects the multiplicity of such counterfactual paths. To address this shortcoming we introduce the novel concept of explanatory multiverse that encompasses all the possible counterfactual journeys. We then show how to navigate, reason about and compare the geometry of these trajectories with two methods: vector spaces and graphs. To this end, we overview their spacial properties -- such as affinity, branching, divergence and possible future convergence -- and propose an all-in-one metric, called opportunity potential, to quantify them. Implementing this (possibly interactive) explanatory process grants explainees agency by allowing them to select counterfactuals based on the properties of the journey leading to them in addition to their absolute differences. We show the flexibility, benefit and efficacy of such an approach through examples and quantitative evaluation on the German Credit and MNIST data sets.
5/7/2024
Enhancing Counterfactual Image Generation Using Mahalanobis Distance with Distribution Preferences in Feature Space
Yukai Zhang, Ao Xu, Zihao Li, Tieru Wu
0
0
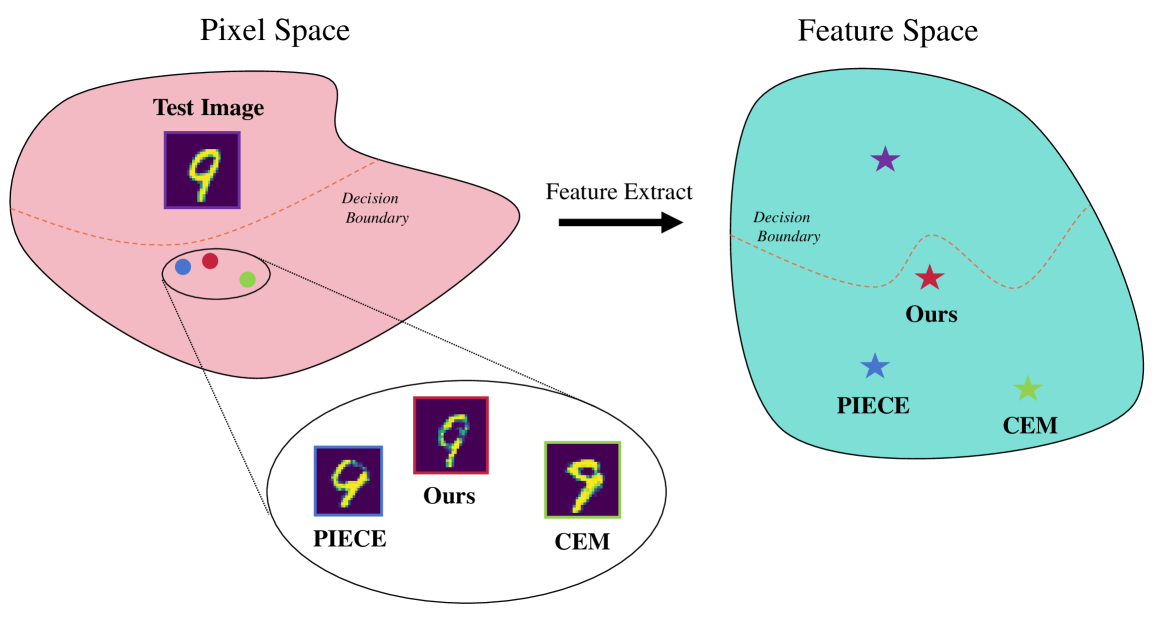
In the realm of Artificial Intelligence (AI), the importance of Explainable Artificial Intelligence (XAI) is increasingly recognized, particularly as AI models become more integral to our lives. One notable single-instance XAI approach is counterfactual explanation, which aids users in comprehending a model's decisions and offers guidance on altering these decisions. Specifically in the context of image classification models, effective image counterfactual explanations can significantly enhance user understanding. This paper introduces a novel method for computing feature importance within the feature space of a black-box model. By employing information fusion techniques, our method maximizes the use of data to address feature counterfactual explanations in the feature space. Subsequently, we utilize an image generation model to transform these feature counterfactual explanations into image counterfactual explanations. Our experiments demonstrate that the counterfactual explanations generated by our method closely resemble the original images in both pixel and feature spaces. Additionally, our method outperforms established baselines, achieving impressive experimental results.
6/3/2024