LGR2: Language Guided Reward Relabeling for Accelerating Hierarchical Reinforcement Learning
2406.05881
0
0

Abstract
Developing interactive systems that leverage natural language instructions to solve complex robotic control tasks has been a long-desired goal in the robotics community. Large Language Models (LLMs) have demonstrated exceptional abilities in handling complex tasks, including logical reasoning, in-context learning, and code generation. However, predicting low-level robotic actions using LLMs poses significant challenges. Additionally, the complexity of such tasks usually demands the acquisition of policies to execute diverse subtasks and combine them to attain the ultimate objective. Hierarchical Reinforcement Learning (HRL) is an elegant approach for solving such tasks, which provides the intuitive benefits of temporal abstraction and improved exploration. However, HRL faces the recurring issue of non-stationarity due to unstable lower primitive behaviour. In this work, we propose LGR2, a novel HRL framework that leverages language instructions to generate a stationary reward function for the higher-level policy. Since the language-guided reward is unaffected by the lower primitive behaviour, LGR2 mitigates non-stationarity and is thus an elegant method for leveraging language instructions to solve robotic control tasks. To analyze the efficacy of our approach, we perform empirical analysis and demonstrate that LGR2 effectively alleviates non-stationarity in HRL. Our approach attains success rates exceeding 70$%$ in challenging, sparse-reward robotic navigation and manipulation environments where the baselines fail to achieve any significant progress. Additionally, we conduct real-world robotic manipulation experiments and demonstrate that CRISP shows impressive generalization in real-world scenarios.
Create account to get full access
Overview
- This paper introduces LGR2, a novel approach for accelerating hierarchical reinforcement learning (RL) using language-guided reward relabeling.
- LGR2 leverages large language models to provide natural language guidance for the agent, which helps it learn faster and perform better on complex tasks.
- The technique can be applied to various hierarchical RL algorithms to boost their performance, as demonstrated in the experiments.
Plain English Explanation
In this research, the authors present a method called LGR2 (Language Guided Reward Relabeling) that can help reinforcement learning agents learn more efficiently. Reinforcement learning is a type of machine learning where an agent learns to perform a task by trial and error, receiving rewards or penalties based on its actions.
One challenge with reinforcement learning is that it can be slow and inefficient, especially for complex tasks. LGR2 addresses this by using language models - AI systems that are trained on vast amounts of text data and can understand and generate human-like language. The key idea is to use these language models to provide guidance to the reinforcement learning agent, helping it learn more quickly and perform better.
Specifically, the language model is used to "relabel" the rewards that the agent receives during training. This means that instead of just getting a simple numerical reward, the agent gets additional information in the form of natural language feedback, like "Good job, you're getting closer to the goal!" This language-based reward guidance helps the agent understand the task better and explore more effectively.
The authors show that applying LGR2 to various hierarchical reinforcement learning algorithms - which break down complex tasks into smaller, more manageable sub-goals - can significantly improve their performance on challenging benchmark tasks. This suggests that language-based techniques like LGR2 have great potential to accelerate the development of capable, real-world reinforcement learning agents.
Technical Explanation
The core of the LGR2 approach is to leverage large language models to provide natural language guidance to hierarchical reinforcement learning agents. This is done through a reward relabeling process, where the original numerical rewards received by the agent are augmented with relevant language-based feedback.
Specifically, the authors use a pre-trained language model to generate natural language descriptions of the agent's current state and the desired goal state. These language descriptions are then used to compute a "relabeled" reward signal that incorporates both the original numerical reward and the language-based guidance.
The relabeled rewards are then used to train the hierarchical reinforcement learning agent, which breaks down the overall task into a series of sub-goals. The language-based guidance helps the agent understand the relationships between these sub-goals and explore the state space more efficiently.
The authors demonstrate the effectiveness of LGR2 by applying it to various hierarchical RL algorithms, including options-based and goal-conditioned approaches. The results show significant performance improvements on challenging benchmark tasks, indicating that language-guided reward relabeling is a promising technique for accelerating the development of capable reinforcement learning agents.
Critical Analysis
The LGR2 approach represents an interesting and potentially impactful contribution to the field of hierarchical reinforcement learning. By leveraging large language models to provide natural language guidance, the authors demonstrate a way to overcome some of the challenges associated with complex, multi-goal tasks.
One potential limitation of the approach is that it relies on the quality and capabilities of the underlying language model. If the language model is not sufficiently capable of understanding the task and generating appropriate feedback, the benefits of LGR2 may be diminished. Additionally, the authors do not explore the robustness of the approach to different language model architectures or variations in the reward relabeling process.
Another area for further research could be the integration of LGR2 with other techniques for improving hierarchical reinforcement learning, such as reward shaping or goal-conditioned policies. Combining language-based guidance with other learning enhancements may lead to even more significant performance improvements.
Overall, the LGR2 approach is a promising step towards making reinforcement learning agents more capable and efficient, particularly for complex, real-world tasks. The authors have demonstrated the potential of leveraging language understanding to guide the learning process, and further research in this direction could yield valuable insights and advancements in the field.
Conclusion
The LGR2 method introduced in this paper represents a novel and compelling approach to accelerating hierarchical reinforcement learning. By using large language models to provide natural language guidance to the agent, the authors have shown that it is possible to significantly boost the performance of various RL algorithms on challenging benchmark tasks.
This research highlights the potential of combining language understanding with reinforcement learning, and suggests that language-based techniques could be a key ingredient in the development of more capable and efficient reinforcement learning agents. As the field of AI continues to advance, techniques like LGR2 may play an important role in bridging the gap between the impressive capabilities of language models and the practical demands of real-world decision-making and control.
Overall, this paper makes a valuable contribution to the ongoing efforts to improve the sample efficiency and performance of reinforcement learning systems, and provides a promising direction for future research in this rapidly evolving area of machine learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Enhancing Reinforcement Learning with Label-Sensitive Reward for Natural Language Understanding
Kuo Liao, Shuang Li, Meng Zhao, Liqun Liu, Mengge Xue, Zhenyu Hu, Honglin Han, Chengguo Yin
0
0
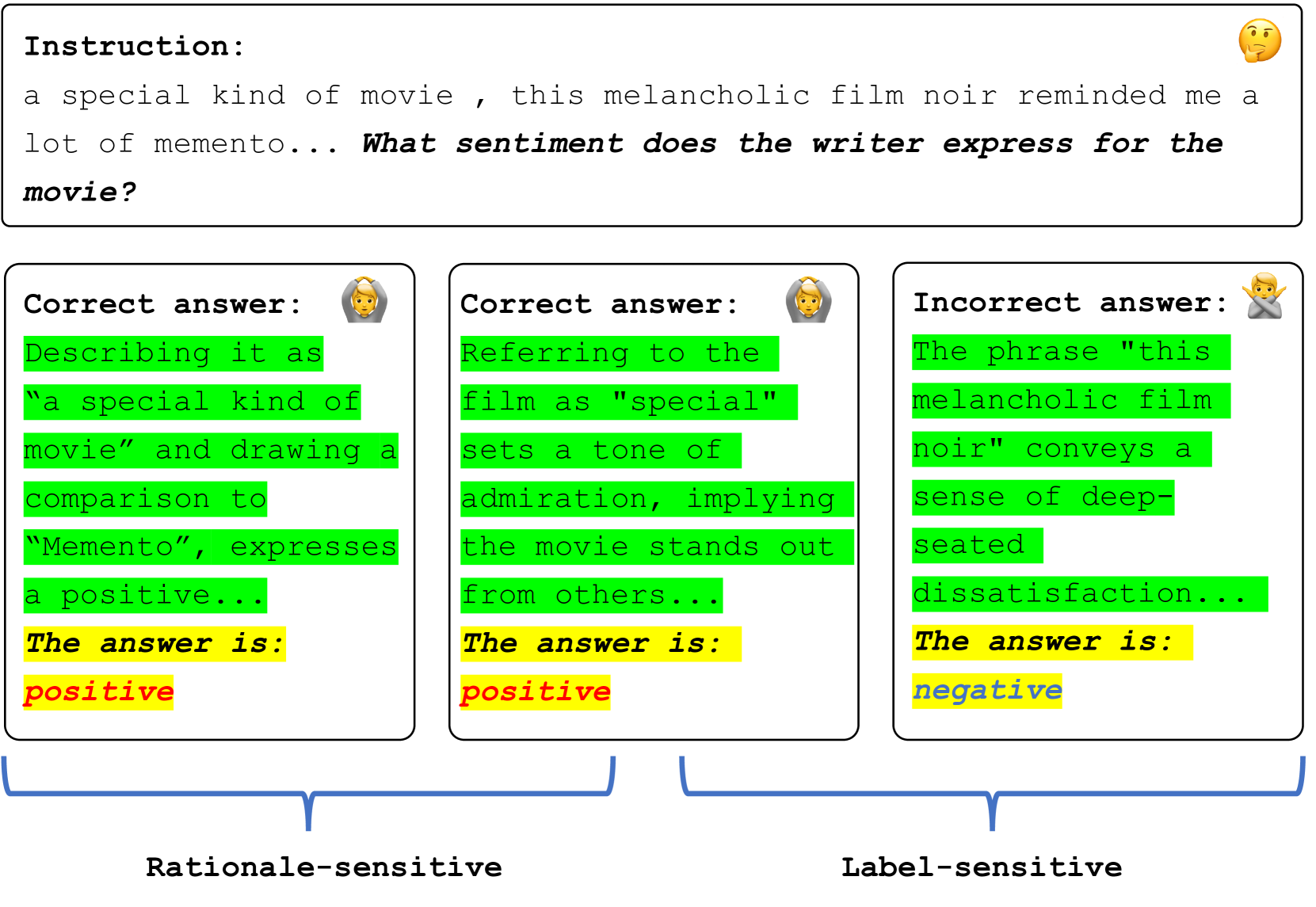
Recent strides in large language models (LLMs) have yielded remarkable performance, leveraging reinforcement learning from human feedback (RLHF) to significantly enhance generation and alignment capabilities. However, RLHF encounters numerous challenges, including the objective mismatch issue, leading to suboptimal performance in Natural Language Understanding (NLU) tasks. To address this limitation, we propose a novel Reinforcement Learning framework enhanced with Label-sensitive Reward (RLLR) to amplify the performance of LLMs in NLU tasks. By incorporating label-sensitive pairs into reinforcement learning, our method aims to adeptly capture nuanced label-sensitive semantic features during RL, thereby enhancing natural language understanding. Experiments conducted on five diverse foundation models across eight tasks showcase promising results. In comparison to Supervised Fine-tuning models (SFT), RLLR demonstrates an average performance improvement of 1.54%. Compared with RLHF models, the improvement averages at 0.69%. These results reveal the effectiveness of our method for LLMs in NLU tasks. Code and data available at: https://github.com/MagiaSN/ACL2024_RLLR.
5/31/2024

Synthesizing Programmatic Reinforcement Learning Policies with Large Language Model Guided Search
Max Liu, Chan-Hung Yu, Wei-Hsu Lee, Cheng-Wei Hung, Yen-Chun Chen, Shao-Hua Sun
0
0
Programmatic reinforcement learning (PRL) has been explored for representing policies through programs as a means to achieve interpretability and generalization. Despite promising outcomes, current state-of-the-art PRL methods are hindered by sample inefficiency, necessitating tens of millions of program-environment interactions. To tackle this challenge, we introduce a novel LLM-guided search framework (LLM-GS). Our key insight is to leverage the programming expertise and common sense reasoning of LLMs to enhance the efficiency of assumption-free, random-guessing search methods. We address the challenge of LLMs' inability to generate precise and grammatically correct programs in domain-specific languages (DSLs) by proposing a Pythonic-DSL strategy - an LLM is instructed to initially generate Python codes and then convert them into DSL programs. To further optimize the LLM-generated programs, we develop a search algorithm named Scheduled Hill Climbing, designed to efficiently explore the programmatic search space to consistently improve the programs. Experimental results in the Karel domain demonstrate the superior effectiveness and efficiency of our LLM-GS framework. Extensive ablation studies further verify the critical role of our Pythonic-DSL strategy and Scheduled Hill Climbing algorithm.
5/28/2024

Guided Cooperation in Hierarchical Reinforcement Learning via Model-based Rollout
Haoran Wang, Zeshen Tang, Leya Yang, Yaoru Sun, Fang Wang, Siyu Zhang, Yeming Chen
0
0
Goal-conditioned hierarchical reinforcement learning (HRL) presents a promising approach for enabling effective exploration in complex, long-horizon reinforcement learning (RL) tasks through temporal abstraction. Empirically, heightened inter-level communication and coordination can induce more stable and robust policy improvement in hierarchical systems. Yet, most existing goal-conditioned HRL algorithms have primarily focused on the subgoal discovery, neglecting inter-level cooperation. Here, we propose a goal-conditioned HRL framework named Guided Cooperation via Model-based Rollout (GCMR), aiming to bridge inter-layer information synchronization and cooperation by exploiting forward dynamics. Firstly, the GCMR mitigates the state-transition error within off-policy correction via model-based rollout, thereby enhancing sample efficiency. Secondly, to prevent disruption by the unseen subgoals and states, lower-level Q-function gradients are constrained using a gradient penalty with a model-inferred upper bound, leading to a more stable behavioral policy conducive to effective exploration. Thirdly, we propose a one-step rollout-based planning, using higher-level critics to guide the lower-level policy. Specifically, we estimate the value of future states of the lower-level policy using the higher-level critic function, thereby transmitting global task information downwards to avoid local pitfalls. These three critical components in GCMR are expected to facilitate inter-level cooperation significantly. Experimental results demonstrate that incorporating the proposed GCMR framework with a disentangled variant of HIGL, namely ACLG, yields more stable and robust policy improvement compared to various baselines and significantly outperforms previous state-of-the-art algorithms.
4/9/2024
💬
Learning Reward for Robot Skills Using Large Language Models via Self-Alignment
Yuwei Zeng, Yao Mu, Lin Shao
0
0
Learning reward functions remains the bottleneck to equip a robot with a broad repertoire of skills. Large Language Models (LLM) contain valuable task-related knowledge that can potentially aid in the learning of reward functions. However, the proposed reward function can be imprecise, thus ineffective which requires to be further grounded with environment information. We proposed a method to learn rewards more efficiently in the absence of humans. Our approach consists of two components: We first use the LLM to propose features and parameterization of the reward, then update the parameters through an iterative self-alignment process. In particular, the process minimizes the ranking inconsistency between the LLM and the learnt reward functions based on the execution feedback. The method was validated on 9 tasks across 2 simulation environments. It demonstrates a consistent improvement over training efficacy and efficiency, meanwhile consuming significantly fewer GPT tokens compared to the alternative mutation-based method.
5/17/2024