Enhancing Reinforcement Learning with Label-Sensitive Reward for Natural Language Understanding

0
Sign in to get full access
Overview
- This paper introduces a label-sensitive reward approach to enhance reinforcement learning for natural language understanding tasks.
- The key idea is to use label information during the training process to guide the model towards better performance on specific language understanding objectives.
- The proposed method is evaluated on several benchmark datasets, demonstrating improvements over standard reinforcement learning techniques.
Plain English Explanation
The paper focuses on improving the way reinforcement learning models learn to understand and process natural language. Reinforcement learning is a type of machine learning where a model learns by trial and error, receiving rewards or penalties based on how well it performs a task.
In this case, the researchers wanted to make the reinforcement learning process more targeted and effective for natural language understanding. They developed a "label-sensitive reward" approach, which means the model not only gets rewarded for correctly completing the task, but also for producing outputs that match specific desired labels or categories.
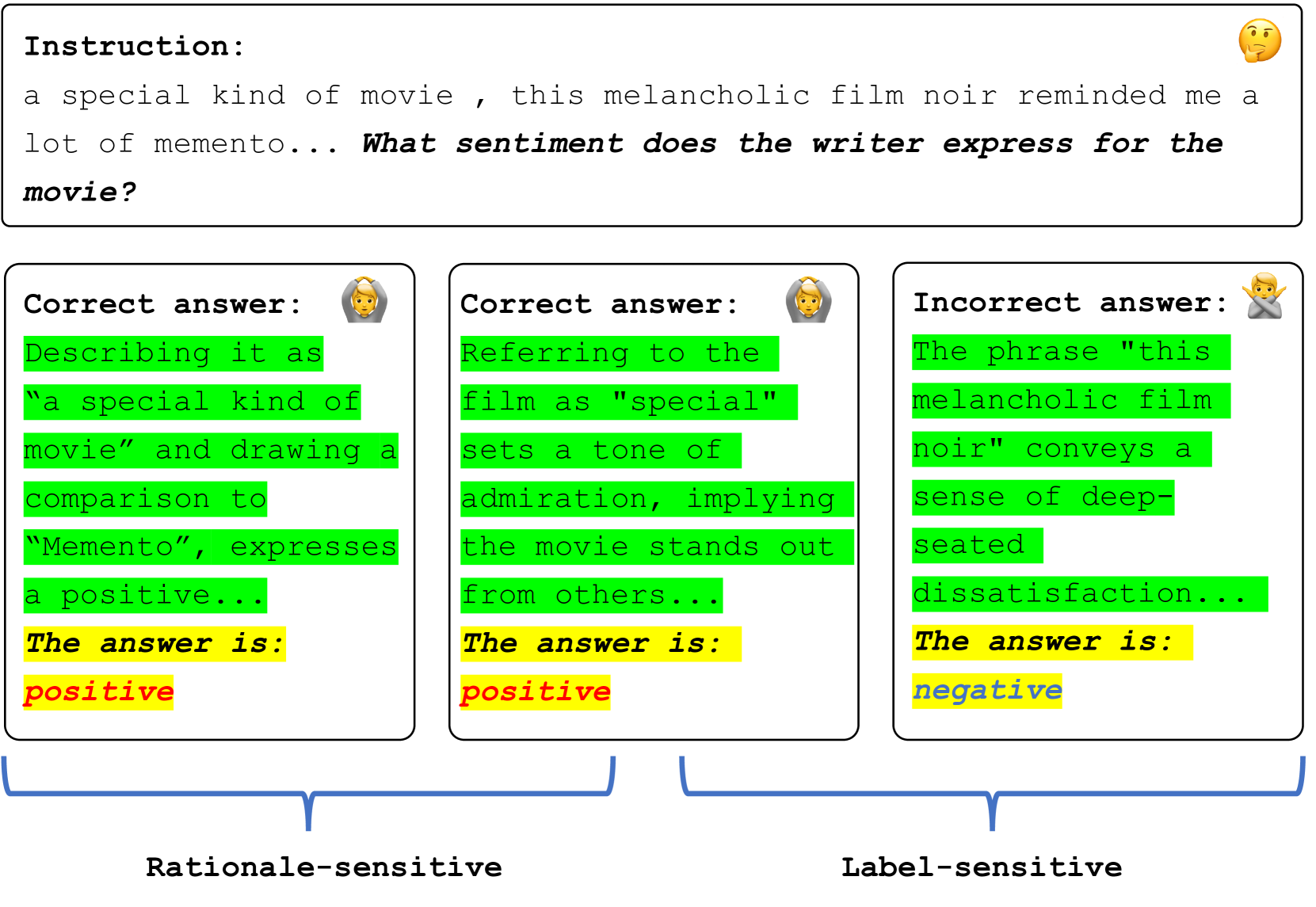
For example, if the task is to classify whether a sentence is positive or negative in sentiment, the model would get rewarded not just for predicting the right sentiment, but also for producing outputs that closely match the pre-defined "positive" or "negative" labels. This helps guide the model towards learning representations that are closely aligned with the intended language understanding objectives.
The researchers tested this approach on several standard benchmarks for natural language processing, and found that it outperformed regular reinforcement learning methods. This suggests the label-sensitive reward can be an effective way to enhance the learning of language models and improve their performance on real-world tasks.
Technical Explanation
The paper proposes a label-sensitive reward mechanism to enhance reinforcement learning for natural language understanding tasks. The key idea is to leverage label information, in addition to task-specific rewards, to guide the model towards learning representations that are more aligned with the intended language understanding objectives.
Specifically, the authors introduce a "label-sensitive reward" that combines the standard task reward with a term that measures the similarity between the model's output and the target label. This encourages the model to not only complete the task correctly, but also produce outputs that closely match the desired labels or categories.
The authors evaluate this approach on several benchmark datasets for natural language understanding, including text classification, question answering, and dialogue response generation. They compare the label-sensitive reward approach to standard reinforcement learning baselines, as well as other techniques like reinforcement learning from human feedback (RLHF) and reinforcement learning via symbolic feedback (RLSF).
The results show that the label-sensitive reward consistently outperforms these baselines, demonstrating the effectiveness of using label information to enhance the reinforcement learning process for natural language understanding tasks. The authors also provide ablation studies and analyses to better understand the contributions of different components of their approach.
Critical Analysis
The paper presents a novel and promising approach to improving reinforcement learning for natural language understanding. The key strength is the intuitive idea of using label information to guide the model's learning, which aligns well with the intended objectives of these language tasks.
That said, the paper does not delve deeply into the potential limitations or caveats of this approach. For example, it would be valuable to understand how sensitive the method is to the quality and availability of the label information, and whether it can be effectively applied to more open-ended or ambiguous language tasks.
Additionally, the paper could have benefited from a more thorough comparison to other recent techniques like improving reinforcement learning from human feedback (IRLHF), teaching large language models to teach themselves (TEAMS-RL), and safe reinforcement learning with free-form natural language. These methods also aim to enhance reinforcement learning for language tasks, and a more detailed analysis of the relative strengths and weaknesses could provide valuable insights.
Overall, the label-sensitive reward approach is a promising direction, but more research is needed to fully understand its limitations, potential pitfalls, and how it compares to other state-of-the-art techniques in this space.
Conclusion
This paper introduces a label-sensitive reward mechanism to enhance reinforcement learning for natural language understanding tasks. The key idea is to leverage label information, in addition to task-specific rewards, to guide the model towards learning representations that are more closely aligned with the intended language understanding objectives.
The experimental results demonstrate the effectiveness of this approach, showing consistent improvements over standard reinforcement learning baselines and other related techniques. This suggests the label-sensitive reward can be a valuable tool for improving the performance of language models on a variety of real-world tasks.
While the paper presents a promising direction, further research is needed to fully understand the limitations and potential caveats of this method, as well as how it compares to other state-of-the-art approaches in this area. Nonetheless, the label-sensitive reward represents an important step forward in enhancing the capabilities of reinforcement learning for natural language understanding.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Enhancing Reinforcement Learning with Label-Sensitive Reward for Natural Language Understanding
Kuo Liao, Shuang Li, Meng Zhao, Liqun Liu, Mengge Xue, Zhenyu Hu, Honglin Han, Chengguo Yin
Recent strides in large language models (LLMs) have yielded remarkable performance, leveraging reinforcement learning from human feedback (RLHF) to significantly enhance generation and alignment capabilities. However, RLHF encounters numerous challenges, including the objective mismatch issue, leading to suboptimal performance in Natural Language Understanding (NLU) tasks. To address this limitation, we propose a novel Reinforcement Learning framework enhanced with Label-sensitive Reward (RLLR) to amplify the performance of LLMs in NLU tasks. By incorporating label-sensitive pairs into reinforcement learning, our method aims to adeptly capture nuanced label-sensitive semantic features during RL, thereby enhancing natural language understanding. Experiments conducted on five diverse foundation models across eight tasks showcase promising results. In comparison to Supervised Fine-tuning models (SFT), RLLR demonstrates an average performance improvement of 1.54%. Compared with RLHF models, the improvement averages at 0.69%. These results reveal the effectiveness of our method for LLMs in NLU tasks. Code and data available at: https://github.com/MagiaSN/ACL2024_RLLR.
Read more5/31/2024

0
Reward-Robust RLHF in LLMs
Yuzi Yan, Xingzhou Lou, Jialian Li, Yiping Zhang, Jian Xie, Chao Yu, Yu Wang, Dong Yan, Yuan Shen
As Large Language Models (LLMs) continue to progress toward more advanced forms of intelligence, Reinforcement Learning from Human Feedback (RLHF) is increasingly seen as a key pathway toward achieving Artificial General Intelligence (AGI). However, the reliance on reward-model-based (RM-based) alignment methods introduces significant challenges due to the inherent instability and imperfections of Reward Models (RMs), which can lead to critical issues such as reward hacking and misalignment with human intentions. In this paper, we introduce a reward-robust RLHF framework aimed at addressing these fundamental challenges, paving the way for more reliable and resilient learning in LLMs. Our approach introduces a novel optimization objective that carefully balances performance and robustness by incorporating Bayesian Reward Model Ensembles (BRME) to model the uncertainty set of reward functions. This allows the framework to integrate both nominal performance and minimum reward signals, ensuring more stable learning even with imperfect RMs. Empirical results demonstrate that our framework consistently outperforms baselines across diverse benchmarks, showing improved accuracy and long-term stability. We also provide a theoretical analysis, demonstrating that reward-robust RLHF approaches the stability of constant reward settings, which proves to be acceptable even in a stochastic-case analysis. Together, these contributions highlight the framework potential to enhance both the performance and stability of LLM alignment.
Read more9/30/2024
0
RLHF Deciphered: A Critical Analysis of Reinforcement Learning from Human Feedback for LLMs
Shreyas Chaudhari, Pranjal Aggarwal, Vishvak Murahari, Tanmay Rajpurohit, Ashwin Kalyan, Karthik Narasimhan, Ameet Deshpande, Bruno Castro da Silva
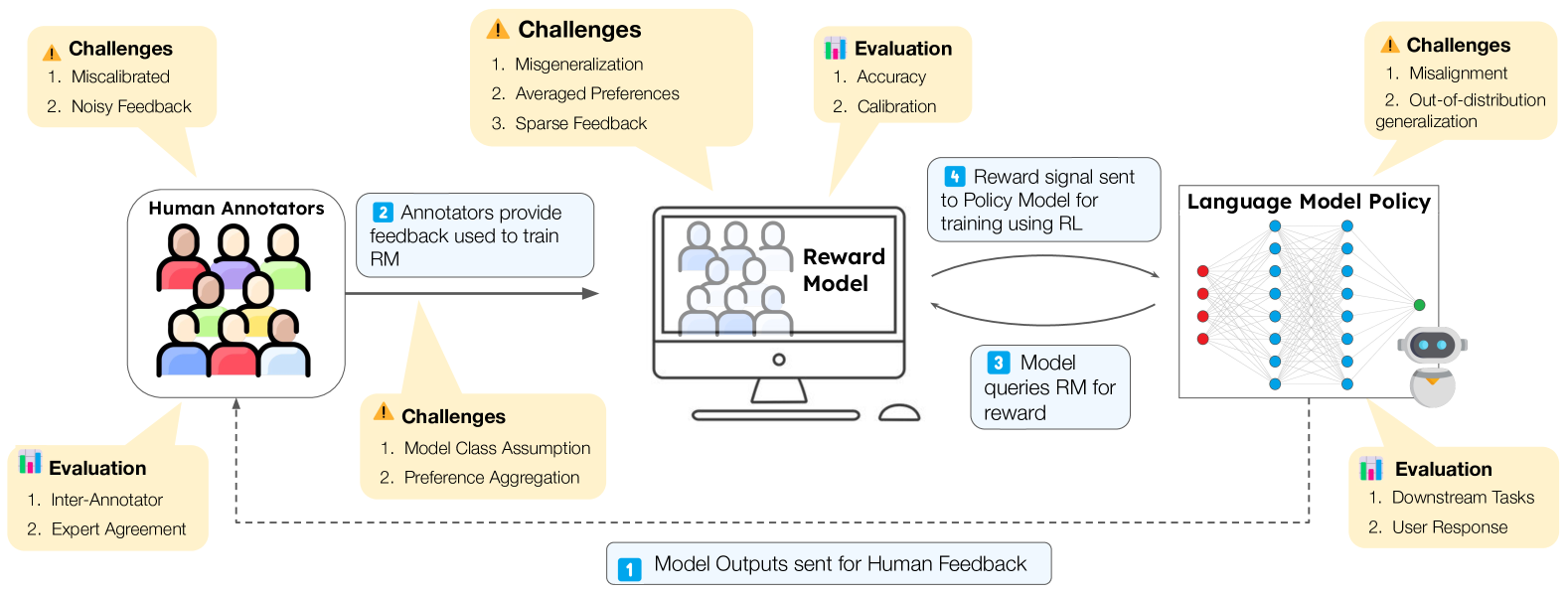
State-of-the-art large language models (LLMs) have become indispensable tools for various tasks. However, training LLMs to serve as effective assistants for humans requires careful consideration. A promising approach is reinforcement learning from human feedback (RLHF), which leverages human feedback to update the model in accordance with human preferences and mitigate issues like toxicity and hallucinations. Yet, an understanding of RLHF for LLMs is largely entangled with initial design choices that popularized the method and current research focuses on augmenting those choices rather than fundamentally improving the framework. In this paper, we analyze RLHF through the lens of reinforcement learning principles to develop an understanding of its fundamentals, dedicating substantial focus to the core component of RLHF -- the reward model. Our study investigates modeling choices, caveats of function approximation, and their implications on RLHF training algorithms, highlighting the underlying assumptions made about the expressivity of reward. Our analysis improves the understanding of the role of reward models and methods for their training, concurrently revealing limitations of the current methodology. We characterize these limitations, including incorrect generalization, model misspecification, and the sparsity of feedback, along with their impact on the performance of a language model. The discussion and analysis are substantiated by a categorical review of current literature, serving as a reference for researchers and practitioners to understand the challenges of RLHF and build upon existing efforts.
Read more4/17/2024

0
LGR2: Language Guided Reward Relabeling for Accelerating Hierarchical Reinforcement Learning
Utsav Singh, Pramit Bhattacharyya, Vinay P. Namboodiri
Developing interactive systems that leverage natural language instructions to solve complex robotic control tasks has been a long-desired goal in the robotics community. Large Language Models (LLMs) have demonstrated exceptional abilities in handling complex tasks, including logical reasoning, in-context learning, and code generation. However, predicting low-level robotic actions using LLMs poses significant challenges. Additionally, the complexity of such tasks usually demands the acquisition of policies to execute diverse subtasks and combine them to attain the ultimate objective. Hierarchical Reinforcement Learning (HRL) is an elegant approach for solving such tasks, which provides the intuitive benefits of temporal abstraction and improved exploration. However, HRL faces the recurring issue of non-stationarity due to unstable lower primitive behaviour. In this work, we propose LGR2, a novel HRL framework that leverages language instructions to generate a stationary reward function for the higher-level policy. Since the language-guided reward is unaffected by the lower primitive behaviour, LGR2 mitigates non-stationarity and is thus an elegant method for leveraging language instructions to solve robotic control tasks. To analyze the efficacy of our approach, we perform empirical analysis and demonstrate that LGR2 effectively alleviates non-stationarity in HRL. Our approach attains success rates exceeding 70$%$ in challenging, sparse-reward robotic navigation and manipulation environments where the baselines fail to achieve any significant progress. Additionally, we conduct real-world robotic manipulation experiments and demonstrate that CRISP shows impressive generalization in real-world scenarios.
Read more6/18/2024