LGSDF: Continual Global Learning of Signed Distance Fields Aided by Local Updating

0

Sign in to get full access
Overview
- Presents a novel continual learning approach for Euclidean signed distance fields (LGSDF)
- Enables gradual learning of complex 3D shapes by updating local regions instead of the entire model
- Leverages both global and local information to maintain model accuracy and flexibility
Plain English Explanation
The paper introduces a new method called LGSDF (Continual Global Learning of Signed Distance Fields Aided by Local Updating) for continually learning and updating 3D shape representations known as Euclidean signed distance fields. These distance fields are a way to compactly encode the geometry of 3D objects, where each point in space has a value representing its distance to the nearest surface.
The key innovation of LGSDF is that it can gradually build up these 3D shape representations over time, rather than having to learn the entire shape at once. This is important because in many real-world scenarios, we may encounter new 3D objects or shapes over time that we need to add to our model. LGSDF achieves this by focusing on updating only the local regions of the distance field that need to change, rather than having to relearn the entire field from scratch.
By combining both global and local information, LGSDF is able to maintain the accuracy of the overall shape representation while also allowing it to adapt and expand as new data is encountered. This makes it a powerful tool for applications like 3D perception, reconstruction, and interaction, where the ability to continually learn and refine 3D shape models is crucial.
Technical Explanation
The LGSDF method builds upon the idea of Euclidean signed distance fields (SDFs) as a way to represent 3D shapes [[link to "Robust One-Class Classification using Signed Distance Function"]]. However, instead of learning a single global SDF model, LGSDF employs a continual learning approach that can gradually update the SDF representation as new data is encountered.
At the core of LGSDF is a strategy for locally updating the SDF model in response to changes, rather than retraining the entire model from scratch. This is achieved by decomposing the global SDF into a set of overlapping local SDFs, each of which can be updated independently. When new data is available, LGSDF first identifies the relevant local SDFs that need to be updated, and then refines only those local regions while leaving the rest of the model unchanged.
To enable this local updating, LGSDF uses a hybrid representation that encodes both global and local information about the 3D shape. The global SDF provides a coarse, holistic understanding of the shape, while the local SDFs capture fine-grained details. By combining these complementary sources of information, LGSDF is able to maintain the overall accuracy of the shape representation while also allowing it to adapt to new data.
The authors evaluate LGSDF on a range of 3D shape datasets and show that it outperforms traditional continual learning approaches, both in terms of maintaining model performance and in the efficiency of the updating process. They also demonstrate the application of LGSDF to tasks like 3D object reconstruction [[link to "Unsupervised Occupancy Learning from Sparse Point Cloud"]] and dynamic 3D mapping [[link to "LIDAR4D: Dynamic Neural Fields for Novel Space-Time"]], highlighting its potential for real-world 3D perception and interaction problems.
Critical Analysis
The LGSDF approach presents a compelling solution to the challenge of continual learning for 3D shape representations. By focusing on local updates rather than global retraining, the method is able to efficiently incorporate new data while preserving the overall accuracy of the model.
One potential limitation of the approach, as mentioned in the paper, is that the local updating strategy relies on the availability of high-quality 3D data to guide the refinement of individual local SDFs. In scenarios where data is sparse or noisy, the local updating process may become less effective, and the method may struggle to maintain the global consistency of the shape representation.
Additionally, the paper does not explore the scalability of the LGSDF approach as the number of local SDFs grows, or how the method might handle the introduction of completely new, unrelated shapes that require more substantial changes to the global model. [[link to "HGS-Mapping: Online Dense Mapping Using Hybrid Geometric-Semantic Representation"]]
Further research could investigate strategies for adaptively managing the local SDF decomposition, or for more intelligently prioritizing which local regions to update based on the incoming data. Exploring the integration of LGSDF with other continual learning techniques, such as replay-based or meta-learning approaches, could also lead to more robust and flexible 3D shape learning capabilities.
Conclusion
The LGSDF method presented in this paper represents an important step forward in the field of continual learning for 3D shape representations. By enabling gradual updates to local regions of a Euclidean signed distance field model, the approach allows for the efficient incorporation of new data while maintaining the overall accuracy and consistency of the 3D shape representation.
This capability has significant implications for a wide range of 3D perception, reconstruction, and interaction applications, where the ability to continually learn and refine 3D models is crucial. As the authors demonstrate, LGSDF can be applied to tasks like object reconstruction and dynamic mapping, opening up new possibilities for more adaptive and flexible 3D sensing and modeling systems.
While the method has some limitations that warrant further research, the core ideas behind LGSDF – leveraging both global and local information, and focusing on efficient local updates – provide a promising foundation for continued advancements in this important area of 3D computer vision and robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
LGSDF: Continual Global Learning of Signed Distance Fields Aided by Local Updating
Yufeng Yue, Yinan Deng, Jiahui Wang, Yi Yang
Implicit reconstruction of ESDF (Euclidean Signed Distance Field) involves training a neural network to regress the signed distance from any point to the nearest obstacle, which has the advantages of lightweight storage and continuous querying. However, existing algorithms usually rely on conflicting raw observations as training data, resulting in poor map performance. In this paper, we propose LGSDF, an ESDF continual Global learning algorithm aided by Local updating. At the front end, axis-aligned grids are dynamically updated by pre-processed sensor observations, where incremental fusion alleviates estimation error caused by limited viewing directions. At the back end, a randomly initialized implicit ESDF neural network performs continual self-supervised learning guided by these grids to generate smooth and continuous maps. The results on multiple scenes show that LGSDF can construct more accurate ESDF maps and meshes compared with SOTA (State Of The Art) explicit and implicit mapping algorithms. The source code of LGSDF is publicly available at https://github.com/BIT-DYN/LGSDF.
Read more4/9/2024

0
Implicit Filtering for Learning Neural Signed Distance Functions from 3D Point Clouds
Shengtao Li, Ge Gao, Yudong Liu, Ming Gu, Yu-Shen Liu
Neural signed distance functions (SDFs) have shown powerful ability in fitting the shape geometry. However, inferring continuous signed distance fields from discrete unoriented point clouds still remains a challenge. The neural network typically fits the shape with a rough surface and omits fine-grained geometric details such as shape edges and corners. In this paper, we propose a novel non-linear implicit filter to smooth the implicit field while preserving high-frequency geometry details. Our novelty lies in that we can filter the surface (zero level set) by the neighbor input points with gradients of the signed distance field. By moving the input raw point clouds along the gradient, our proposed implicit filtering can be extended to non-zero level sets to keep the promise consistency between different level sets, which consequently results in a better regularization of the zero level set. We conduct comprehensive experiments in surface reconstruction from objects and complex scene point clouds, the numerical and visual comparisons demonstrate our improvements over the state-of-the-art methods under the widely used benchmarks.
Read more9/11/2024
0
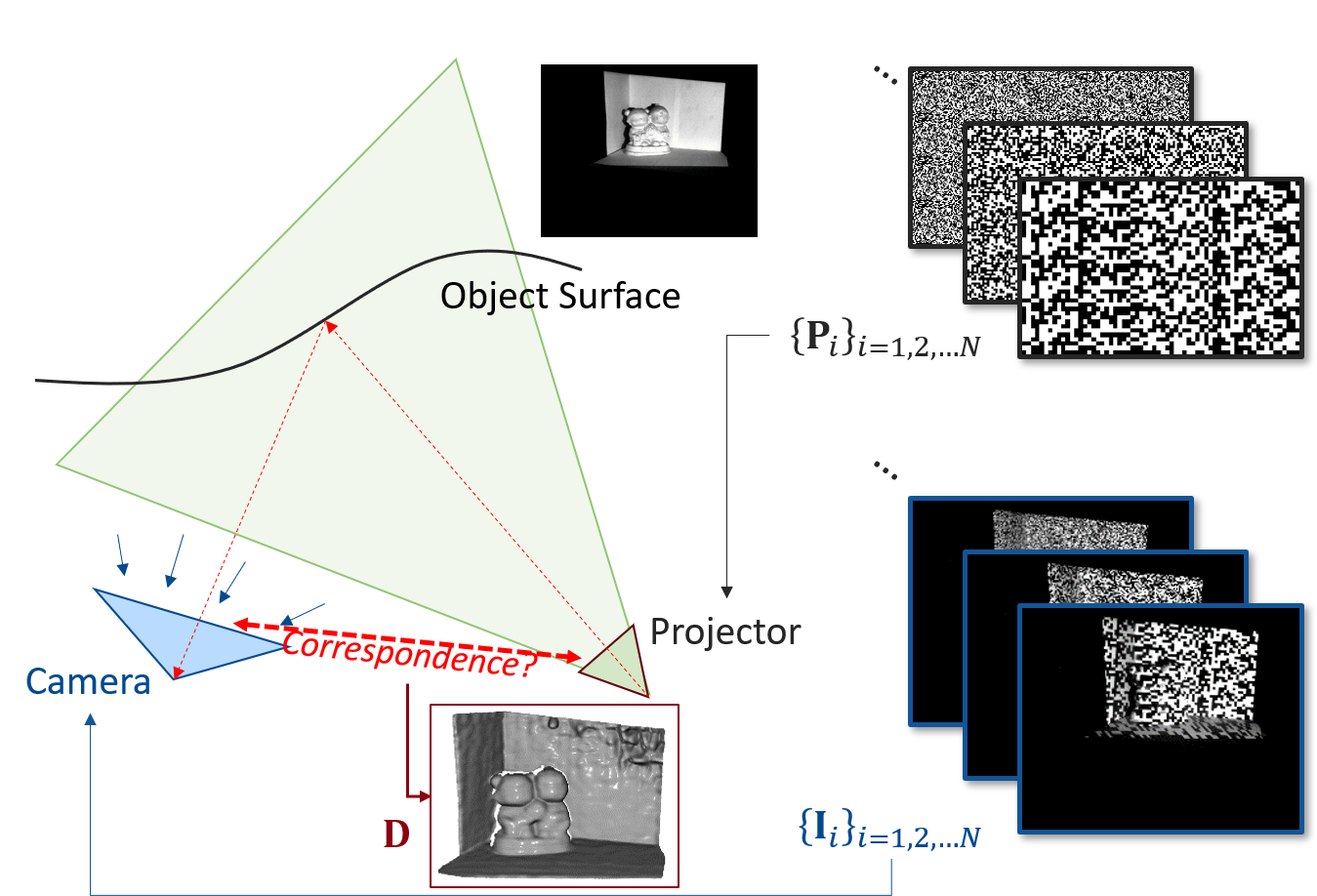
Depth Reconstruction with Neural Signed Distance Fields in Structured Light Systems
Rukun Qiao, Hiroshi Kawasaki, Hongbin Zha
We introduce a novel depth estimation technique for multi-frame structured light setups using neural implicit representations of 3D space. Our approach employs a neural signed distance field (SDF), trained through self-supervised differentiable rendering. Unlike passive vision, where joint estimation of radiance and geometry fields is necessary, we capitalize on known radiance fields from projected patterns in structured light systems. This enables isolated optimization of the geometry field, ensuring convergence and network efficacy with fixed device positioning. To enhance geometric fidelity, we incorporate an additional color loss based on object surfaces during training. Real-world experiments demonstrate our method's superiority in geometric performance for few-shot scenarios, while achieving comparable results with increased pattern availability.
Read more5/21/2024

0
VDB-GPDF: Online Gaussian Process Distance Field with VDB Structure
Lan Wu, Cedric Le Gentil, Teresa Vidal-Calleja
Robots reason about the environment through dedicated representations. Popular choices for dense representations exploit Truncated Signed Distance Functions (TSDF) and Octree data structures. However, TSDF is a projective signed distance obtained directly from depth measurements that overestimates the Euclidean distance. Octrees, despite being memory efficient, require tree traversal and can lead to increased runtime in large scenarios. Other representations based on Gaussian Process (GP) distance fields are appealing due to their probabilistic and continuous nature, but the computational complexity is a concern. In this paper, we present an online efficient mapping framework that seamlessly couples GP distance fields and the fast-access VDB data structure. This framework incrementally builds the Euclidean distance field and fuses other surface properties, like intensity or colour, into a global scene representation that can cater for large-scale scenarios. The key aspect is a latent Local GP Signed Distance Field (L-GPDF) contained in a local VDB structure that allows fast queries of the Euclidean distance, surface properties and their uncertainties for arbitrary points in the field of view. Probabilistic fusion is then performed by merging the inferred values of these points into a global VDB structure that is efficiently maintained over time. After fusion, the surface mesh is recovered, and a global GP Signed Distance Field (G-GPDF) is generated and made available for downstream applications to query accurate distance and gradients. A comparison with the state-of-the-art frameworks shows superior efficiency and accuracy of the inferred distance field and comparable reconstruction performance. The accompanying code will be publicly available. https://github.com/UTS-RI/VDB_GPDF
Read more7/30/2024