Depth Reconstruction with Neural Signed Distance Fields in Structured Light Systems

0
Sign in to get full access
Overview
- This paper explores the use of neural signed distance fields (NSDFs) for depth reconstruction in structured light systems.
- The authors propose a novel approach that leverages NSDFs to improve the accuracy and robustness of depth estimation compared to traditional methods.
- The technique is evaluated on various indoor and outdoor datasets, demonstrating its effectiveness in handling challenging lighting conditions and complex scenes.
Plain English Explanation
Depth reconstruction, or the process of determining the 3D structure of a scene, is an important task in computer vision and robotics. One approach to depth reconstruction is using structured light systems, which project a known pattern of light onto the environment and analyze the distortions to infer depth information.
The authors of this paper have developed a new method for depth reconstruction in structured light systems that uses neural signed distance fields (NSDFs). NSDFs are a type of 3D representation that can model complex shapes and surfaces more accurately than traditional methods.
The key idea is to use NSDFs to capture the shape of the object or environment being scanned, and then use this information to estimate the depth more precisely. This approach is particularly useful in challenging lighting conditions or for complex scenes, where traditional structured light techniques may struggle.
The authors have evaluated their method on a variety of indoor and outdoor datasets, and have shown that it outperforms existing structured light techniques in terms of accuracy and robustness. This research could have important implications for applications such as 3D mapping, robotic navigation, and augmented reality.
Technical Explanation
The authors propose a novel depth reconstruction pipeline that leverages neural signed distance fields (NSDFs) to enhance the performance of structured light systems. NSDFs are a compact and expressive 3D representation that can model complex shapes and surfaces more accurately than traditional methods.
The key components of their approach are:
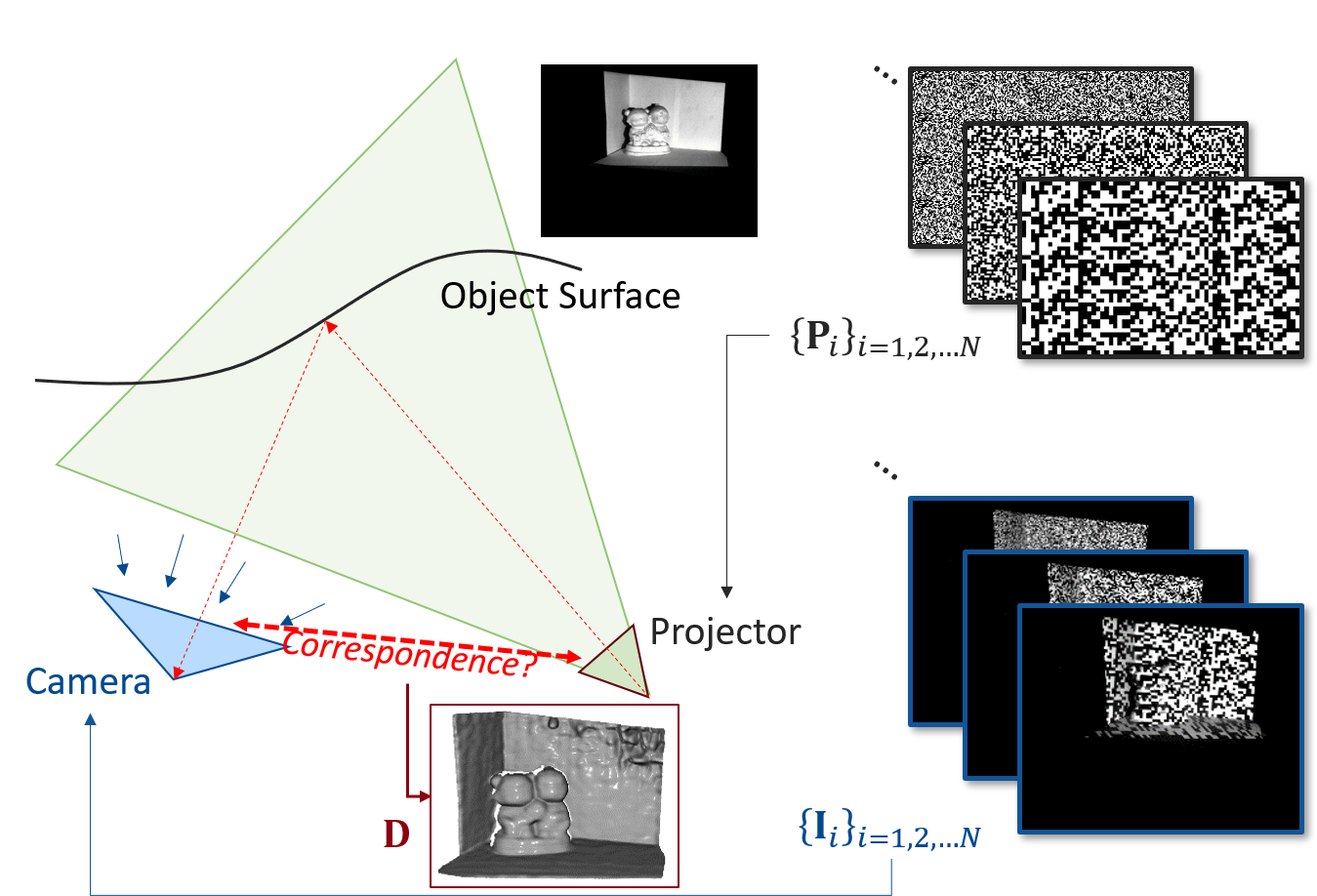
- Structured Light Acquisition: The system projects a known pattern of light onto the scene and captures the resulting distortions using a camera.
- Neural Signed Distance Field Regression: A deep neural network is trained to learn the mapping between the observed structured light patterns and the corresponding NSDF representation of the scene.
- Depth Estimation: The estimated NSDF is then used to compute the depth information, leveraging the inherent properties of signed distance fields.
The authors evaluate their method on various indoor and outdoor datasets, including the SLG3D and 3DVOR benchmarks. The results demonstrate that their NSDF-based approach outperforms traditional structured light techniques, especially in challenging lighting conditions and complex scenes.
Critical Analysis
The authors have made a compelling case for the use of NSDFs in structured light depth reconstruction. The key strength of their approach is the ability to capture the underlying 3D geometry more accurately, which leads to improved depth estimation performance.
However, the paper does not address the computational complexity and inference time of their NSDF-based method, which could be a practical concern for real-time applications. Additionally, the training of the NSDF regression model requires a significant amount of labeled data, which may not always be readily available.
The authors also acknowledge that their approach may struggle with highly reflective or transparent surfaces, as the structured light patterns may not be reliably captured in such cases. Further research could explore ways to address these limitations, perhaps by incorporating additional sensor modalities or developing more robust NSDF estimation techniques.
Overall, the authors have presented a promising direction for improving depth reconstruction in structured light systems, with potential applications in areas such as 3D mapping, robot navigation, and augmented reality. The findings of this work could inspire further advancements in the use of NSDFs and other advanced 3D representations for depth estimation and scene understanding.
Conclusion
This paper introduces a novel depth reconstruction method for structured light systems that leverages neural signed distance fields (NSDFs). The NSDF-based approach effectively captures the underlying 3D geometry of the scene, leading to improved depth estimation performance compared to traditional techniques, particularly in challenging lighting conditions and complex environments.
The authors have demonstrated the effectiveness of their method on various indoor and outdoor datasets, highlighting its potential for applications in areas such as 3D mapping, robotic navigation, and augmented reality. While the approach shows promise, further research is needed to address the computational complexity and the handling of highly reflective or transparent surfaces.
Overall, this work represents a significant contribution to the field of depth reconstruction, showcasing the power of advanced 3D representations like NSDFs in enhancing the capabilities of structured light systems. The findings of this paper could inspire new avenues of research and development in the broader context of 3D scene understanding and reconstruction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Depth Reconstruction with Neural Signed Distance Fields in Structured Light Systems
Rukun Qiao, Hiroshi Kawasaki, Hongbin Zha
We introduce a novel depth estimation technique for multi-frame structured light setups using neural implicit representations of 3D space. Our approach employs a neural signed distance field (SDF), trained through self-supervised differentiable rendering. Unlike passive vision, where joint estimation of radiance and geometry fields is necessary, we capitalize on known radiance fields from projected patterns in structured light systems. This enables isolated optimization of the geometry field, ensuring convergence and network efficacy with fixed device positioning. To enhance geometric fidelity, we incorporate an additional color loss based on object surfaces during training. Real-world experiments demonstrate our method's superiority in geometric performance for few-shot scenarios, while achieving comparable results with increased pattern availability.
Read more5/21/2024
👨🏫
0
Depth Supervised Neural Surface Reconstruction from Airborne Imagery
Vincent Hackstein, Paul Fauth-Mayer, Matthias Rothermel, Norbert Haala
While originally developed for novel view synthesis, Neural Radiance Fields (NeRFs) have recently emerged as an alternative to multi-view stereo (MVS). Triggered by a manifold of research activities, promising results have been gained especially for texture-less, transparent, and reflecting surfaces, while such scenarios remain challenging for traditional MVS-based approaches. However, most of these investigations focus on close-range scenarios, with studies for airborne scenarios still missing. For this task, NeRFs face potential difficulties at areas of low image redundancy and weak data evidence, as often found in street canyons, facades or building shadows. Furthermore, training such networks is computationally expensive. Thus, the aim of our work is twofold: First, we investigate the applicability of NeRFs for aerial image blocks representing different characteristics like nadir-only, oblique and high-resolution imagery. Second, during these investigations we demonstrate the benefit of integrating depth priors from tie-point measures, which are provided during presupposed Bundle Block Adjustment. Our work is based on the state-of-the-art framework VolSDF, which models 3D scenes by signed distance functions (SDFs), since this is more applicable for surface reconstruction compared to the standard volumetric representation in vanilla NeRFs. For evaluation, the NeRF-based reconstructions are compared to results of a publicly available benchmark dataset for airborne images.
Read more4/26/2024

0
SparseCraft: Few-Shot Neural Reconstruction through Stereopsis Guided Geometric Linearization
Mae Younes, Amine Ouasfi, Adnane Boukhayma
We present a novel approach for recovering 3D shape and view dependent appearance from a few colored images, enabling efficient 3D reconstruction and novel view synthesis. Our method learns an implicit neural representation in the form of a Signed Distance Function (SDF) and a radiance field. The model is trained progressively through ray marching enabled volumetric rendering, and regularized with learning-free multi-view stereo (MVS) cues. Key to our contribution is a novel implicit neural shape function learning strategy that encourages our SDF field to be as linear as possible near the level-set, hence robustifying the training against noise emanating from the supervision and regularization signals. Without using any pretrained priors, our method, called SparseCraft, achieves state-of-the-art performances both in novel-view synthesis and reconstruction from sparse views in standard benchmarks, while requiring less than 10 minutes for training.
Read more7/22/2024

0
RaNeuS: Ray-adaptive Neural Surface Reconstruction
Yida Wang, David Joseph Tan, Nassir Navab, Federico Tombari
Our objective is to leverage a differentiable radiance field eg NeRF to reconstruct detailed 3D surfaces in addition to producing the standard novel view renderings. There have been related methods that perform such tasks, usually by utilizing a signed distance field (SDF). However, the state-of-the-art approaches still fail to correctly reconstruct the small-scale details, such as the leaves, ropes, and textile surfaces. Considering that different methods formulate and optimize the projection from SDF to radiance field with a globally constant Eikonal regularization, we improve with a ray-wise weighting factor to prioritize the rendering and zero-crossing surface fitting on top of establishing a perfect SDF. We propose to adaptively adjust the regularization on the signed distance field so that unsatisfying rendering rays won't enforce strong Eikonal regularization which is ineffective, and allow the gradients from regions with well-learned radiance to effectively back-propagated to the SDF. Consequently, balancing the two objectives in order to generate accurate and detailed surfaces. Additionally, concerning whether there is a geometric bias between the zero-crossing surface in SDF and rendering points in the radiance field, the projection becomes adjustable as well depending on different 3D locations during optimization. Our proposed textit{RaNeuS} are extensively evaluated on both synthetic and real datasets, achieving state-of-the-art results on both novel view synthesis and geometric reconstruction.
Read more6/17/2024