LightViz: Autonomous Light-field Surveying and Mapping for Distributed Light Pollution Monitoring

0
Sign in to get full access
Overview
- Autonomous surveying and mapping of light fields for distributed light pollution monitoring
- Integrates sensing, navigation, and geospatial mapping capabilities
- Aims to enable comprehensive and scalable assessment of light pollution
Plain English Explanation
The LightViz system is designed to autonomously survey and map light fields for the purpose of monitoring light pollution. It combines various technologies, including sensors, navigation systems, and geospatial mapping, to create a comprehensive and scalable solution for assessing the extent and impact of light pollution in a given area.
Rather than relying on manual or sparse data collection methods, LightViz leverages autonomous systems to gather detailed, high-resolution information about the light environment. This allows for a more thorough and accurate understanding of light pollution, which can have significant implications for environmental conservation, energy efficiency, and human health.
By automating the surveying and mapping process, LightViz aims to make light pollution monitoring more accessible and practical on a broader scale. This could lead to more informed decision-making and the development of targeted strategies to address light pollution in communities around the world.
Technical Explanation
The LightViz system consists of several key components:
-
Light Sensing: The system utilizes advanced light sensors to measure various characteristics of the light environment, such as intensity, spectrum, and directionality. This data is crucial for accurately assessing the presence and impact of light pollution.
-
Autonomous Navigation: LightViz incorporates autonomous navigation capabilities, allowing the system to navigate and survey the target area without the need for manual control. This includes the use of technologies like GPS, inertial measurement units, and simultaneous localization and mapping (SLAM) algorithms.
-
Geospatial Mapping: The sensor data collected during the autonomous survey is combined with the navigation information to create detailed, geospatially-referenced maps of the light environment. These maps can be used to visualize and analyze the spatial distribution of light pollution.
-
AI-driven Algorithms: The LightViz system leverages advanced AI and machine learning techniques to process the sensor data, optimize the navigation and surveying process, and produce high-quality light pollution maps. These algorithms play a crucial role in making the system autonomous and efficient.
By integrating these various components, the LightViz system is able to autonomously survey and map the light environment, enabling comprehensive and scalable monitoring of light pollution. This information can inform decision-making, guide policy development, and support efforts to mitigate the negative impacts of excessive artificial lighting.
Critical Analysis
The LightViz system presents a promising approach to addressing the challenge of light pollution monitoring, but it is important to consider some potential limitations and areas for further research:
-
Deployment Challenges: While the autonomous nature of LightViz aims to make it more scalable, the deployment and coordination of multiple units across large geographic areas may still present logistical and technical challenges that need to be addressed.
-
Sensor Accuracy and Calibration: The accuracy and reliability of the light sensing capabilities are critical for the system to provide meaningful and actionable data. Careful calibration and validation of the sensors will be crucial to ensure the integrity of the collected data.
-
Integration with Existing Infrastructure: Successful implementation of LightViz may require integration with existing infrastructure, such as street lighting systems or other urban data networks. Developing seamless integration methods could enhance the system's usefulness and adoption.
-
Privacy and Ethical Considerations: The use of autonomous, networked systems for environmental monitoring raises important questions about data privacy and the ethical use of such technologies. Addressing these concerns will be important for the widespread acceptance and adoption of the LightViz system.
-
Environmental Impact: While the goal of LightViz is to mitigate light pollution, the energy consumption and emissions associated with the operation of the autonomous surveying system should also be considered and minimized to ensure the overall environmental benefits.
Addressing these challenges and continuing to refine the LightViz system could lead to significant advancements in the field of light pollution monitoring and help drive more informed decision-making and effective strategies to reduce the negative impacts of excessive artificial lighting.
Conclusion
The LightViz system represents a novel and promising approach to autonomous light-field surveying and mapping for distributed light pollution monitoring. By integrating sensing, navigation, and geospatial mapping capabilities, LightViz aims to enable comprehensive and scalable assessments of light pollution, which can inform efforts to mitigate its environmental, energy, and health-related consequences.
As the research and development of this system continues, addressing the identified challenges and considerations will be crucial to ensuring its widespread adoption and positive impact. The successful implementation of LightViz could lead to a better understanding of light pollution and the implementation of more effective strategies for creating healthier, more sustainable nighttime environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
LightViz: Autonomous Light-field Surveying and Mapping for Distributed Light Pollution Monitoring
Sheng-En Huang, Kazi Farha Farzana Suhi, Md Jahidul Islam
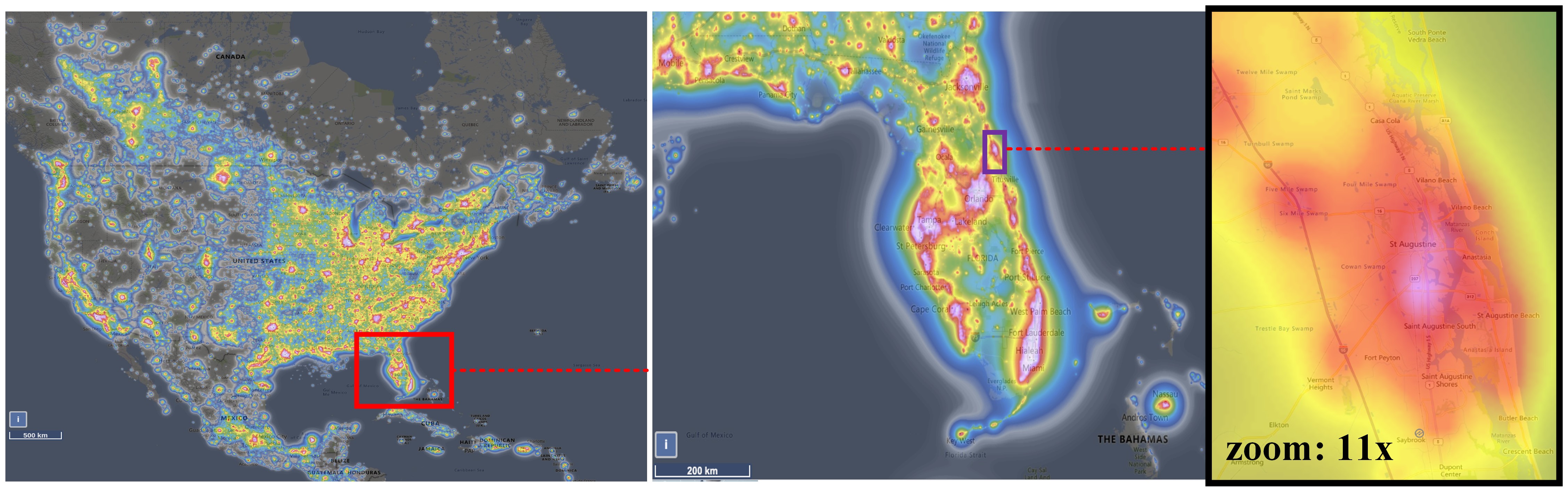
Existing technologies for distributed light-field mapping and light pollution monitoring (LPM) rely on either remote satellite imagery or manual light surveying with single-point sensors such as SQMs (sky quality meters). These modalities offer low-resolution data that are not informative for dense light-field mapping, pollutant factor identification, or sustainable policy implementation. In this work, we propose LightViz -- an interactive software interface to survey, simulate, and visualize light pollution maps in real-time. As opposed to manual error-prone methods, LightViz (i) automates the light-field data collection and mapping processes; (ii) provides a platform to simulate various light sources and intensity attenuation models; and (iii) facilitates effective policy identification for conservation. To validate the end-to-end computational pipeline, we design a distributed light-field sensor suit, collect data on Florida coasts, and visualize the distributed light-field maps. In particular, we perform a case study at St. Johns County in Florida, which has a two-decade conservation program for lighting ordinances. The experimental results demonstrate that LightViz can offer high-resolution light-field mapping and provide interactive features to simulate and formulate community policies for light pollution mitigation. We also propose a mathematical formulation for light footprint evaluation, which we integrated into LightViz for targeted LPM in vulnerable communities.
Read more8/5/2024

0
Towards Greener Nights: Exploring AI-Driven Solutions for Light Pollution Management
Paras Varshney, Niral Desai, Uzair Ahmed
This research endeavors to address the pervasive issue of light pollution through an interdisciplinary approach, leveraging data science and machine learning techniques. By analyzing extensive datasets and research findings, we aim to develop predictive models capable of estimating the degree of sky glow observed in various locations and times. Our research seeks to inform evidence-based interventions and promote responsible outdoor lighting practices to mitigate the adverse impacts of light pollution on ecosystems, energy consumption, and human well-being.
Read more4/16/2024

0
DeepLight: Reconstructing High-Resolution Observations of Nighttime Light With Multi-Modal Remote Sensing Data
Lixian Zhang, Runmin Dong, Shuai Yuan, Jinxiao Zhang, Mengxuan Chen, Juepeng Zheng, Haohuan Fu
Nighttime light (NTL) remote sensing observation serves as a unique proxy for quantitatively assessing progress toward meeting a series of Sustainable Development Goals (SDGs), such as poverty estimation, urban sustainable development, and carbon emission. However, existing NTL observations often suffer from pervasive degradation and inconsistency, limiting their utility for computing the indicators defined by the SDGs. In this study, we propose a novel approach to reconstruct high-resolution NTL images using multi-modal remote sensing data. To support this research endeavor, we introduce DeepLightMD, a comprehensive dataset comprising data from five heterogeneous sensors, offering fine spatial resolution and rich spectral information at a national scale. Additionally, we present DeepLightSR, a calibration-aware method for building bridges between spatially heterogeneous modality data in the multi-modality super-resolution. DeepLightSR integrates calibration-aware alignment, an auxiliary-to-main multi-modality fusion, and an auxiliary-embedded refinement to effectively address spatial heterogeneity, fuse diversely representative features, and enhance performance in $8times$ super-resolution (SR) tasks. Extensive experiments demonstrate the superiority of DeepLightSR over 8 competing methods, as evidenced by improvements in PSNR (2.01 dB $ sim $ 13.25 dB) and PIQE (0.49 $ sim $ 9.32). Our findings underscore the practical significance of our proposed dataset and model in reconstructing high-resolution NTL data, supporting efficiently and quantitatively assessing the SDG progress.
Read more5/27/2024
👨🏫
0
LIV-GaussMap: LiDAR-Inertial-Visual Fusion for Real-time 3D Radiance Field Map Rendering
Sheng Hong, Junjie He, Xinhu Zheng, Chunran Zheng, Shaojie Shen
We introduce an integrated precise LiDAR, Inertial, and Visual (LIV) multimodal sensor fused mapping system that builds on the differentiable pre{surface splatting }now{Gaussians} to improve the mapping fidelity, quality, and structural accuracy. Notably, this is also a novel form of tightly coupled map for LiDAR-visual-inertial sensor fusion. This system leverages the complementary characteristics of LiDAR and visual data to capture the geometric structures of large-scale 3D scenes and restore their visual surface information with high fidelity. The initialization for the scene's surface Gaussians and the sensor's poses of each frame are obtained using a LiDAR-inertial system with the feature of size-adaptive voxels. Then, we optimized and refined the Gaussians using visual-derived photometric gradients to optimize their quality and density. Our method is compatible with various types of LiDAR, including solid-state and mechanical LiDAR, supporting both repetitive and non-repetitive scanning modes. Bolstering structure construction through LiDAR and facilitating real-time generation of photorealistic renderings across diverse LIV datasets. It showcases notable resilience and versatility in generating real-time photorealistic scenes potentially for digital twins and virtual reality, while also holding potential applicability in real-time SLAM and robotics domains. We release our software and hardware and self-collected datasets to benefit the community.
Read more5/20/2024