Lightweight Event-based Optical Flow Estimation via Iterative Deblurring

0
🔄
Sign in to get full access
Overview
- Introduces a new lightweight, high-performing event-based optical flow network called IDNet (Iterative Deblurring Network)
- IDNet directly estimates optical flow from event traces without using expensive correlation volumes
- Proposes two iterative update schemes: ID (iterates over the same batch of events) and TID (iterates over time with streaming events)
- IDNet sets a new state-of-the-art on the DSEC benchmark while using 80% fewer parameters and running 40% faster than previous methods
- The real-time TID model offers 5x faster inference and 8ms ultra-low latency, making it suitable for robotic applications with limited compute
Plain English Explanation
IDNet is a new type of neural network that can estimate optical flow, which is a measure of how objects are moving in a video, from event-based camera data. Event-based cameras are specialized cameras that only record changes in the scene, rather than full frames like traditional cameras.
Previous state-of-the-art event-based optical flow networks relied on an expensive process called "correlation volumes" to find correspondences between events. This made them unsuitable for use in robots and other devices with limited computing power. IDNet avoids this by directly estimating the optical flow from the continuous traces of events, without using correlation volumes.
The researchers also proposed two ways for IDNet to iteratively refine its optical flow estimates. The first, called ID, reuses the same batch of events multiple times. The second, called TID, processes the events as they arrive over time, allowing the network to operate in an online, real-time fashion.
The ID version of IDNet sets a new benchmark for event-based optical flow, while using 80% fewer parameters and running 40% faster than previous methods. The TID version is even more efficient, offering 5x faster inference speed and an 8ms response time, making it suitable for use in robotics applications that require low latency.
Technical Explanation
Inspired by frame-based optical flow methods, state-of-the-art event-based optical flow networks rely on the explicit construction of correlation volumes. These correlation volumes are expensive to compute and store, making them unsuitable for robotic applications with limited compute and energy budgets. Furthermore, correlation volumes scale poorly with resolution, prohibiting high-resolution flow estimation.
The researchers observed that the spatiotemporally continuous traces of events provide a natural search direction for seeking pixel correspondences, obviating the need to rely on gradients of explicit correlation volumes. They introduced IDNet, a lightweight yet high-performing event-based optical flow network that directly estimates flow from event traces without using correlation volumes.
The researchers further proposed two iterative update schemes for IDNet:
- ID (Iterative Deblurring): Iterates over the same batch of events multiple times to refine the optical flow estimates.
- TID (Time-Iterative Deblurring): Iterates over time with streaming events in an online fashion, allowing for real-time operation.
The top-performing ID model sets a new state of the art on the DSEC benchmark. The base ID model is competitive with prior event-based optical flow methods while using 80% fewer parameters, consuming 20x less memory, and running 40% faster on the Nvidia Jetson Xavier NX.
The TID model is even more efficient, offering an additional 5x faster inference speed and 8ms ultra-low latency, at the cost of only a 9% performance drop. This makes the TID model the only one in the current literature capable of real-time operation while maintaining decent performance, making it suitable for robotic applications.
Critical Analysis
The paper presents a compelling approach to event-based optical flow estimation that addresses the limitations of previous methods. By avoiding the use of correlation volumes, IDNet is able to achieve significant improvements in efficiency and computational cost, making it better suited for deployment on resource-constrained platforms like robots.
However, the paper does not provide a detailed analysis of the types of scenes or motion patterns where IDNet excels or struggles compared to other event-based optical flow techniques. It would be helpful to understand the specific strengths and weaknesses of the proposed approach, as well as the types of applications it is best suited for.
Additionally, the paper does not discuss the potential impact of the iterative update schemes on the network's robustness to noise or its ability to handle occlusions and other challenging scenarios common in real-world environments. Further research in these areas could help solidify the practical benefits of IDNet for real-world robotics applications.
Overall, the work represents an important step forward in event-based optical flow estimation, and the authors' insights on the advantages of directly estimating flow from event traces rather than relying on correlation volumes are likely to inspire further advancements in this rapidly evolving field.
Conclusion
The IDNet paper introduces a novel, lightweight event-based optical flow network that significantly improves upon the efficiency and computational cost of previous state-of-the-art methods. By directly estimating flow from event traces rather than using expensive correlation volumes, IDNet sets a new benchmark on the DSEC dataset while consuming 80% fewer parameters and running 40% faster.
The proposed iterative update schemes, ID and TID, further enhance the network's performance and real-time capabilities, with the TID model offering 5x faster inference and 8ms ultra-low latency. These advancements make IDNet a promising candidate for deployment in robotic and other resource-constrained applications that require high-performance event-based vision.
The paper's key insights into the advantages of event-based flow estimation without correlation volumes represent an important contribution to the field of event-based vision, and are likely to inspire further research and development in this rapidly evolving area of computer vision and robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔄
0
Lightweight Event-based Optical Flow Estimation via Iterative Deblurring
Yilun Wu, Federico Paredes-Vall'es, Guido C. H. E. de Croon
Inspired by frame-based methods, state-of-the-art event-based optical flow networks rely on the explicit construction of correlation volumes, which are expensive to compute and store, rendering them unsuitable for robotic applications with limited compute and energy budget. Moreover, correlation volumes scale poorly with resolution, prohibiting them from estimating high-resolution flow. We observe that the spatiotemporally continuous traces of events provide a natural search direction for seeking pixel correspondences, obviating the need to rely on gradients of explicit correlation volumes as such search directions. We introduce IDNet (Iterative Deblurring Network), a lightweight yet high-performing event-based optical flow network directly estimating flow from event traces without using correlation volumes. We further propose two iterative update schemes: ID which iterates over the same batch of events, and TID which iterates over time with streaming events in an online fashion. Our top-performing ID model sets a new state of the art on DSEC benchmark. Meanwhile, the base ID model is competitive with prior arts while using 80% fewer parameters, consuming 20x less memory footprint and running 40% faster on the NVidia Jetson Xavier NX. Furthermore, the TID model is even more efficient offering an additional 5x faster inference speed and 8 ms ultra-low latency at the cost of only a 9% performance drop, making it the only model among current literature capable of real-time operation while maintaining decent performance.
Read more5/7/2024
0
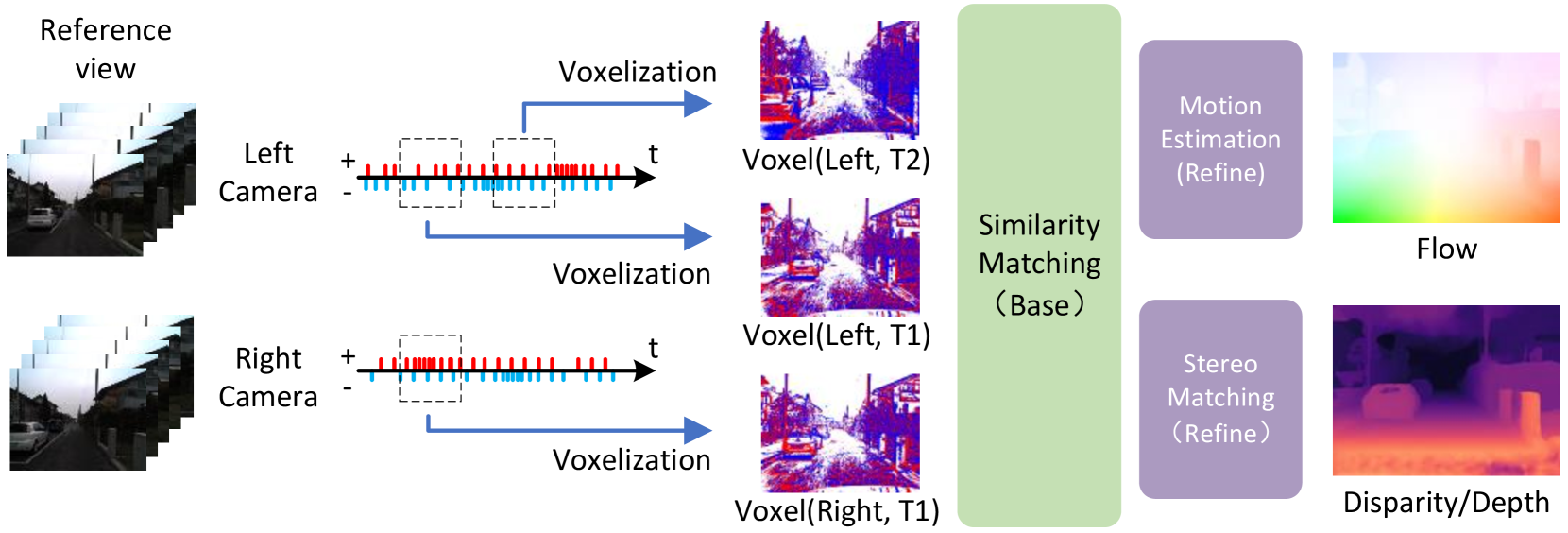
Unifying Event-based Flow, Stereo and Depth Estimation via Feature Similarity Matching
Pengjie Zhang, Lin Zhu, Lizhi Wang, Hua Huang
As an emerging vision sensor, the event camera has gained popularity in various vision tasks such as optical flow estimation, stereo matching, and depth estimation due to its high-speed, sparse, and asynchronous event streams. Unlike traditional approaches that use specialized architectures for each specific task, we propose a unified framework, EventMatch, that reformulates these tasks as an event-based dense correspondence matching problem, allowing them to be solved with a single model by directly comparing feature similarities. By utilizing a shared feature similarities module, which integrates knowledge from other event flows via temporal or spatial interactions, and distinct task heads, our network can concurrently perform optical flow estimation from temporal inputs (e.g., two segments of event streams in the temporal domain) and stereo matching from spatial inputs (e.g., two segments of event streams from different viewpoints in the spatial domain). Moreover, we further demonstrate that our unified model inherently supports cross-task transfer since the architecture and parameters are shared across tasks. Without the need for retraining on each task, our model can effectively handle both optical flow and disparity estimation simultaneously. The experiment conducted on the DSEC benchmark demonstrates that our model exhibits superior performance in both optical flow and disparity estimation tasks, outperforming existing state-of-the-art methods. Our unified approach not only advances event-based models but also opens new possibilities for cross-task transfer and inter-task fusion in both spatial and temporal dimensions. Our code will be available later.
Read more8/1/2024

0
Towards Real-world Event-guided Low-light Video Enhancement and Deblurring
Taewoo Kim, Jaeseok Jeong, Hoonhee Cho, Yuhwan Jeong, Kuk-Jin Yoon
In low-light conditions, capturing videos with frame-based cameras often requires long exposure times, resulting in motion blur and reduced visibility. While frame-based motion deblurring and low-light enhancement have been studied, they still pose significant challenges. Event cameras have emerged as a promising solution for improving image quality in low-light environments and addressing motion blur. They provide two key advantages: capturing scene details well even in low light due to their high dynamic range, and effectively capturing motion information during long exposures due to their high temporal resolution. Despite efforts to tackle low-light enhancement and motion deblurring using event cameras separately, previous work has not addressed both simultaneously. To explore the joint task, we first establish real-world datasets for event-guided low-light enhancement and deblurring using a hybrid camera system based on beam splitters. Subsequently, we introduce an end-to-end framework to effectively handle these tasks. Our framework incorporates a module to efficiently leverage temporal information from events and frames. Furthermore, we propose a module to utilize cross-modal feature information to employ a low-pass filter for noise suppression while enhancing the main structural information. Our proposed method significantly outperforms existing approaches in addressing the joint task. Our project pages are available at https://github.com/intelpro/ELEDNet.
Read more8/28/2024

0
SDformerFlow: Spatiotemporal swin spikeformer for event-based optical flow estimation
Yi Tian, Juan Andrade-Cetto
Event cameras generate asynchronous and sparse event streams capturing changes in light intensity. They offer significant advantages over conventional frame-based cameras, such as a higher dynamic range and an extremely faster data rate, making them particularly useful in scenarios involving fast motion or challenging lighting conditions. Spiking neural networks (SNNs) share similar asynchronous and sparse characteristics and are well-suited for processing data from event cameras. Inspired by the potential of transformers and spike-driven transformers (spikeformers) in other computer vision tasks, we propose two solutions for fast and robust optical flow estimation for event cameras: STTFlowNet and SDformerFlow. STTFlowNet adopts a U-shaped artificial neural network (ANN) architecture with spatiotemporal shifted window self-attention (swin) transformer encoders, while SDformerFlow presents its fully spiking counterpart, incorporating swin spikeformer encoders. Furthermore, we present two variants of the spiking version with different neuron models. Our work is the first to make use of spikeformers for dense optical flow estimation. We conduct end-to-end training for all models using supervised learning. Our results yield state-of-the-art performance among SNN-based event optical flow methods on both the DSEC and MVSEC datasets, and show significant reduction in power consumption compared to the equivalent ANNs.
Read more9/9/2024