A Lightweight Human Pose Estimation Approach for Edge Computing-Enabled Metaverse with Compressive Sensing

0

Sign in to get full access
Overview
- This paper proposes a lightweight human pose estimation approach for edge computing-enabled metaverse applications.
- The approach uses compressive sensing and inertial measurement units (IMUs) to efficiently estimate human poses.
- It aims to enable real-time, low-latency human pose tracking in resource-constrained metaverse environments.
Plain English Explanation
The paper describes a new method for tracking the movements and positions of a person's body in virtual reality (VR) or augmented reality (AR) environments, known as the "metaverse". The key idea is to use a combination of compressive sensing and inertial measurement units (IMUs) to efficiently estimate the person's pose, or body position and orientation.
Compressive sensing is a technique that can reconstruct a signal from a small number of measurements, which is important for conserving computing resources in the metaverse. IMUs are small sensors that can measure motion and orientation, and are commonly used in VR/AR systems to track user movements.
By using compressive sensing with IMUs, the researchers developed a system that can accurately estimate a person's pose using far less data and computational power than traditional approaches. This is crucial for enabling real-time, low-latency pose tracking in the resource-constrained environments of the metaverse, where devices may have limited processing power and bandwidth.
Technical Explanation
The paper proposes a hybrid approach that combines compressive sensing and IMU data to perform lightweight human pose estimation for metaverse applications. The key elements of the approach are:
-
Compressive Sensing: The system uses compressive sensing techniques to reconstruct the person's pose from a small number of IMU measurements. This helps reduce the data and computational requirements compared to traditional pose estimation methods.
-
IMU-based Pose Estimation: The system relies on IMU sensors attached to the user's body to measure motion and orientation. These IMU measurements are then used as input to the compressive sensing-based pose estimation algorithm.
-
Edge Computing Integration: The proposed approach is designed to be executed on edge computing devices, which are closer to the user and can provide low-latency, real-time pose estimation for metaverse applications.
The authors evaluate their approach through simulations and demonstrate its effectiveness in terms of accuracy, latency, and computational efficiency compared to alternative methods. The results suggest that the proposed lightweight pose estimation technique can enable robust and responsive human-avatar interactions in edge computing-powered metaverse environments.
Critical Analysis
The paper presents a promising approach for human pose estimation in metaverse applications, but there are a few potential limitations and areas for further research:
-
Sensor Placement and Calibration: The accuracy of the IMU-based pose estimation may be sensitive to the placement and calibration of the sensors on the user's body. The paper does not provide detailed guidelines on sensor configuration.
-
Occlusion and Dynamic Environments: The proposed approach may struggle with occluded body parts or rapidly changing environments, which could affect the reliability of the pose estimates. Incorporating additional sensors or multimodal data could help address these challenges.
-
User Personalization: The paper does not discuss the potential need for user-specific calibration or adaptation of the pose estimation model to accommodate individual differences in body types and movement patterns.
-
Scalability and Deployment: While the approach is designed for edge computing, the performance and scalability of the system in large-scale metaverse scenarios with multiple users remains to be investigated.
Overall, the paper presents a solid foundation for lightweight human pose estimation in metaverse environments, but further research and development may be needed to address these potential limitations and make the approach more robust and widely applicable.
Conclusion
This paper introduces a novel approach for human pose estimation in edge computing-enabled metaverse applications. By combining compressive sensing and inertial measurement unit (IMU) data, the proposed method can efficiently reconstruct a person's pose while requiring fewer computational resources than traditional pose estimation techniques.
The key innovation is the integration of compressive sensing, which allows for accurate pose reconstruction from a small number of IMU measurements. This enables real-time, low-latency human pose tracking in resource-constrained metaverse environments, where devices may have limited processing power and bandwidth.
The authors demonstrate the effectiveness of their approach through simulations and highlight its potential to enable responsive and realistic human-avatar interactions in the emerging metaverse. While the paper identifies some areas for further research, such as sensor placement and occlusion handling, the proposed lightweight pose estimation technique represents an important step towards enabling seamless and immersive experiences in edge computing-powered virtual and augmented reality applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Lightweight Human Pose Estimation Approach for Edge Computing-Enabled Metaverse with Compressive Sensing
Nguyen Quang Hieu, Dinh Thai Hoang, Diep N. Nguyen
The ability to estimate 3D movements of users over edge computing-enabled networks, such as 5G/6G networks, is a key enabler for the new era of extended reality (XR) and Metaverse applications. Recent advancements in deep learning have shown advantages over optimization techniques for estimating 3D human poses given spare measurements from sensor signals, i.e., inertial measurement unit (IMU) sensors attached to the XR devices. However, the existing works lack applicability to wireless systems, where transmitting the IMU signals over noisy wireless networks poses significant challenges. Furthermore, the potential redundancy of the IMU signals has not been considered, resulting in highly redundant transmissions. In this work, we propose a novel approach for redundancy removal and lightweight transmission of IMU signals over noisy wireless environments. Our approach utilizes a random Gaussian matrix to transform the original signal into a lower-dimensional space. By leveraging the compressive sensing theory, we have proved that the designed Gaussian matrix can project the signal into a lower-dimensional space and preserve the Set-Restricted Eigenvalue condition, subject to a power transmission constraint. Furthermore, we develop a deep generative model at the receiver to recover the original IMU signals from noisy compressed data, thus enabling the creation of 3D human body movements at the receiver for XR and Metaverse applications. Simulation results on a real-world IMU dataset show that our framework can achieve highly accurate 3D human poses of the user using only $82%$ of the measurements from the original signals. This is comparable to an optimization-based approach, i.e., Lasso, but is an order of magnitude faster.
Read more9/4/2024
👀
0
Reconstructing Human Pose from Inertial Measurements: A Generative Model-based Compressive Sensing Approach
Nguyen Quang Hieu, Dinh Thai Hoang, Diep N. Nguyen, Mohammad Abu Alsheikh
The ability to sense, localize, and estimate the 3D position and orientation of the human body is critical in virtual reality (VR) and extended reality (XR) applications. This becomes more important and challenging with the deployment of VR/XR applications over the next generation of wireless systems such as 5G and beyond. In this paper, we propose a novel framework that can reconstruct the 3D human body pose of the user given sparse measurements from Inertial Measurement Unit (IMU) sensors over a noisy wireless environment. Specifically, our framework enables reliable transmission of compressed IMU signals through noisy wireless channels and effective recovery of such signals at the receiver, e.g., an edge server. This task is very challenging due to the constraints of transmit power, recovery accuracy, and recovery latency. To address these challenges, we first develop a deep generative model at the receiver to recover the data from linear measurements of IMU signals. The linear measurements of the IMU signals are obtained by a linear projection with a measurement matrix based on the compressive sensing theory. The key to the success of our framework lies in the novel design of the measurement matrix at the transmitter, which can not only satisfy power constraints for the IMU devices but also obtain a highly accurate recovery for the IMU signals at the receiver. This can be achieved by extending the set-restricted eigenvalue condition of the measurement matrix and combining it with an upper bound for the power transmission constraint. Our framework can achieve robust performance for recovering 3D human poses from noisy compressed IMU signals. Additionally, our pre-trained deep generative model achieves signal reconstruction accuracy comparable to an optimization-based approach, i.e., Lasso, but is an order of magnitude faster.
Read more5/14/2024
0
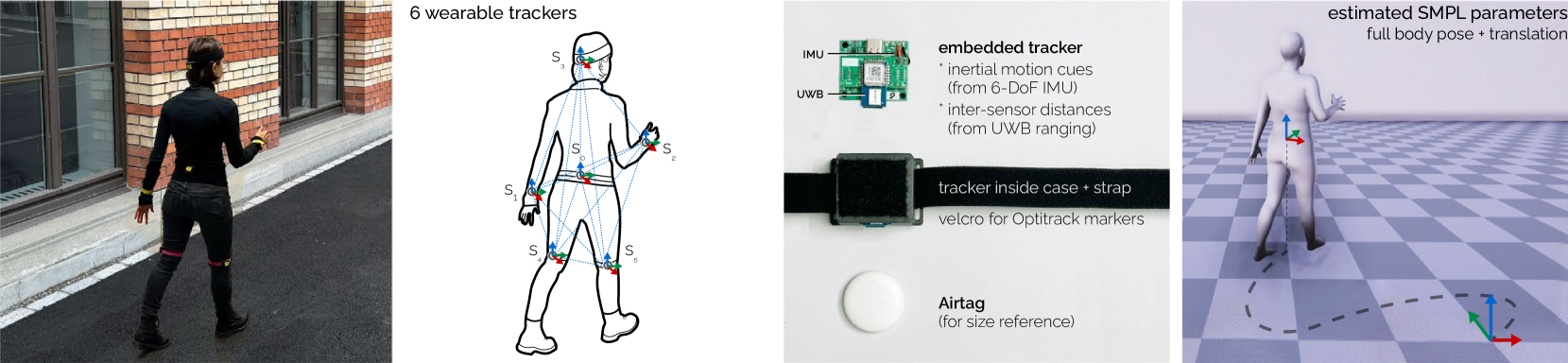
Ultra Inertial Poser: Scalable Motion Capture and Tracking from Sparse Inertial Sensors and Ultra-Wideband Ranging
Rayan Armani, Changlin Qian, Jiaxi Jiang, Christian Holz
While camera-based capture systems remain the gold standard for recording human motion, learning-based tracking systems based on sparse wearable sensors are gaining popularity. Most commonly, they use inertial sensors, whose propensity for drift and jitter have so far limited tracking accuracy. In this paper, we propose Ultra Inertial Poser, a novel 3D full body pose estimation method that constrains drift and jitter in inertial tracking via inter-sensor distances. We estimate these distances across sparse sensor setups using a lightweight embedded tracker that augments inexpensive off-the-shelf 6D inertial measurement units with ultra-wideband radio-based ranging$-$dynamically and without the need for stationary reference anchors. Our method then fuses these inter-sensor distances with the 3D states estimated from each sensor Our graph-based machine learning model processes the 3D states and distances to estimate a person's 3D full body pose and translation. To train our model, we synthesize inertial measurements and distance estimates from the motion capture database AMASS. For evaluation, we contribute a novel motion dataset of 10 participants who performed 25 motion types, captured by 6 wearable IMU+UWB trackers and an optical motion capture system, totaling 200 minutes of synchronized sensor data (UIP-DB). Our extensive experiments show state-of-the-art performance for our method over PIP and TIP, reducing position error from $13.62$ to $10.65cm$ ($22%$ better) and lowering jitter from $1.56$ to $0.055km/s^3$ (a reduction of $97%$).
Read more5/1/2024
0
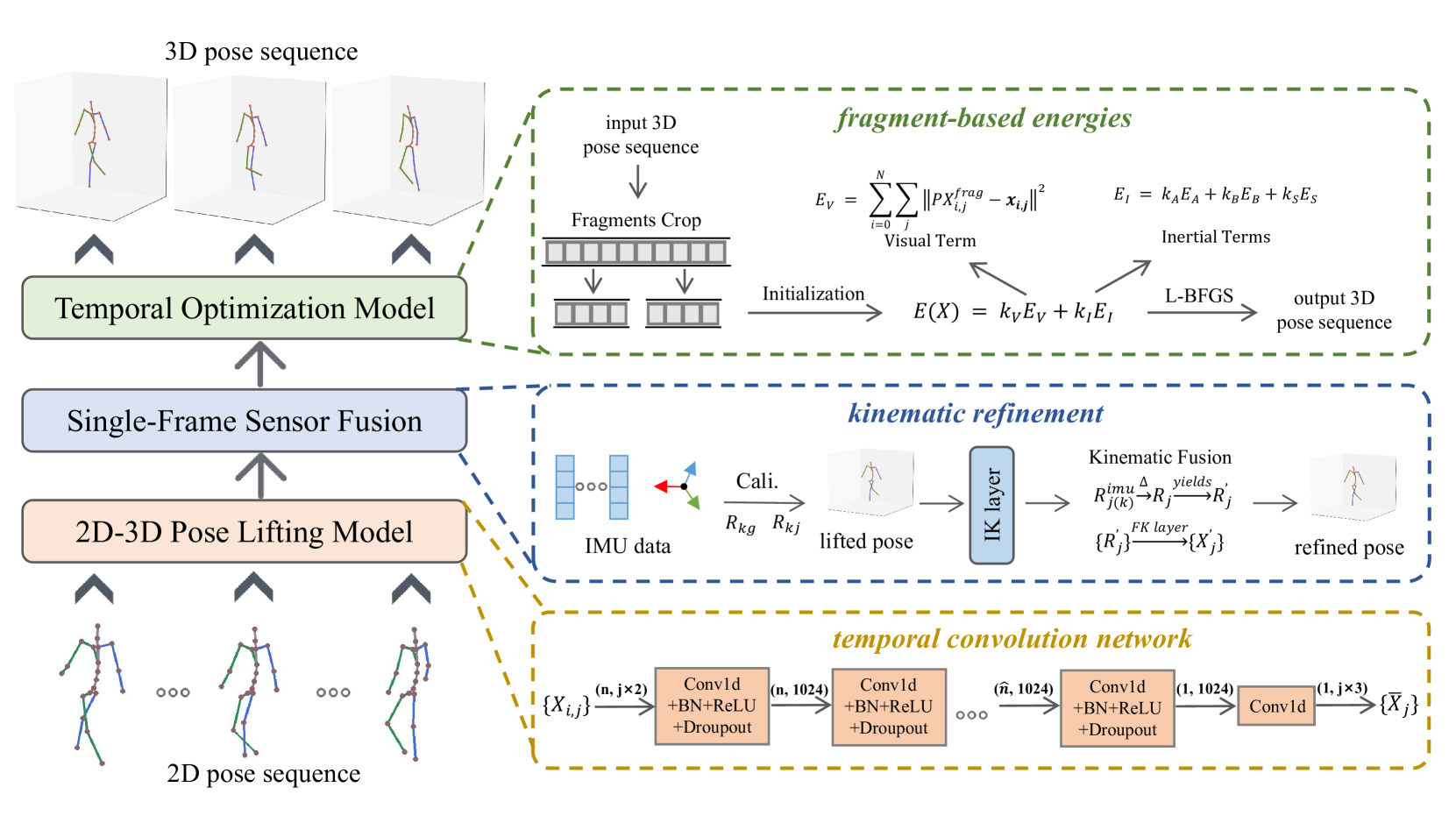
Hybrid 3D Human Pose Estimation with Monocular Video and Sparse IMUs
Yiming Bao, Xu Zhao, Dahong Qian
Temporal 3D human pose estimation from monocular videos is a challenging task in human-centered computer vision due to the depth ambiguity of 2D-to-3D lifting. To improve accuracy and address occlusion issues, inertial sensor has been introduced to provide complementary source of information. However, it remains challenging to integrate heterogeneous sensor data for producing physically rational 3D human poses. In this paper, we propose a novel framework, Real-time Optimization and Fusion (RTOF), to address this issue. We first incorporate sparse inertial orientations into a parametric human skeleton to refine 3D poses in kinematics. The poses are then optimized by energy functions built on both visual and inertial observations to reduce the temporal jitters. Our framework outputs smooth and biomechanically plausible human motion. Comprehensive experiments with ablation studies demonstrate its rationality and efficiency. On Total Capture dataset, the pose estimation error is significantly decreased compared to the baseline method.
Read more4/30/2024