On-line Motion Planning Using Bernstein Polynomials for Enhanced Target Localization in Autonomous Vehicles

0
🎯
Sign in to get full access
Overview
- Autonomous vehicles are increasingly used for target localization due to their efficiency, safety, and cost advantages over human-operated methods.
- Achieving computationally efficient motion planning for real-time target localization is challenging.
- This paper introduces a motion planning solution that leverages Bernstein polynomial basis functions to enhance target localization.
Plain English Explanation
Autonomous vehicles, such as self-driving cars or drones, are becoming more common in various applications, including target localization. Target localization is the process of quickly and accurately identifying the location of a specific object or person. Autonomous vehicles can perform this task more efficiently, safely, and cost-effectively than human-operated methods.
However, developing a motion planning system that can efficiently navigate the vehicle to locate the target in real-time is not easy. The paper presents a solution that uses a special mathematical tool called Bernstein polynomial basis functions to estimate the probable trajectory of the target. This allows the motion planner to make decisions that improve the effectiveness of the localization process.
Technical Explanation
The paper introduces a motion planning approach for enhanced target localization using autonomous vehicles. The key innovation is the use of Bernstein polynomial basis functions to approximate the probability distribution of the target's trajectory. This allows the researchers to derive estimation performance criteria that the motion planner can use to improve the efficiency of the localization process.
The authors present simulation results that validate the effectiveness of their proposed algorithm. By leveraging the Bernstein polynomial representation, the motion planner can make decisions that enhance the estimator's performance in locating the target as quickly and accurately as possible.
Critical Analysis
The paper provides a promising solution for improving the motion planning capabilities of autonomous vehicles in target localization tasks. However, the authors do not discuss potential limitations or areas for further research. For example, the approach may not perform as well in complex, dynamic environments with multiple moving targets or obstacles.
Additionally, the simulation results presented in the paper may not fully capture the challenges of real-world deployment, such as sensor noise, communication delays, or unexpected target behavior. Further testing and validation in more realistic scenarios would be valuable to assess the robustness and practicality of the proposed algorithm.
Conclusion
This paper introduces a motion planning solution for autonomous vehicles that enhances their ability to localize targets efficiently and effectively. By leveraging Bernstein polynomial basis functions to model the target's trajectory, the motion planner can make decisions that improve the overall localization performance. While the simulation results are promising, additional research is needed to address potential limitations and validate the approach in more realistic environments, as discussed in the critical analysis section.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🎯
0
On-line Motion Planning Using Bernstein Polynomials for Enhanced Target Localization in Autonomous Vehicles
Camilla Tabasso, Venanzio Cichella
The use of autonomous vehicles for target localization in modern applications has emphasized their superior efficiency, improved safety, and cost advantages over human-operated methods. For localization tasks, autonomous vehicles can be used to increase efficiency and ensure that the target is localized as quickly and precisely as possible. However, devising a motion planning scheme to achieve these objectives in a computationally efficient manner suitable for real-time implementation is not straightforward. In this paper, we introduce a motion planning solution for enhanced target localization, leveraging Bernstein polynomial basis functions to approximate the probability distribution of the target's trajectory. This allows us to derive estimation performance criteria which are used by the motion planner to enhance the estimator efficacy. To conclude, we present simulation results that validate the effectiveness of the suggested algorithm.
Read more4/15/2024

0
BPMP-Tracker: A Versatile Aerial Target Tracker Using Bernstein Polynomial Motion Primitives
Yunwoo Lee, Jungwon Park, Boseong Jeon, Seungwoo Jung, H. Jin Kim
This letter presents a versatile trajectory planning pipeline for aerial tracking. The proposed tracker is capable of handling various chasing settings such as complex unstructured environments, crowded dynamic obstacles and multiple-target following. Among the entire pipeline, we focus on developing a predictor for future target motion and a chasing trajectory planner. For rapid computation, we employ the sample-check-select strategy: modules sample a set of candidate movements, check multiple constraints, and then select the best trajectory. Also, we leverage the properties of Bernstein polynomials for quick calculations. The prediction module predicts the trajectories of the targets, which do not overlap with static and dynamic obstacles. Then the trajectory planner outputs a trajectory, ensuring various conditions such as occlusion and collision avoidance, the visibility of all targets within a camera image and dynamical limits. We fully test the proposed tracker in simulations and hardware experiments under challenging scenarios, including dual-target following, environments with dozens of dynamic obstacles and complex indoor and outdoor spaces.
Read more8/9/2024
0
Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
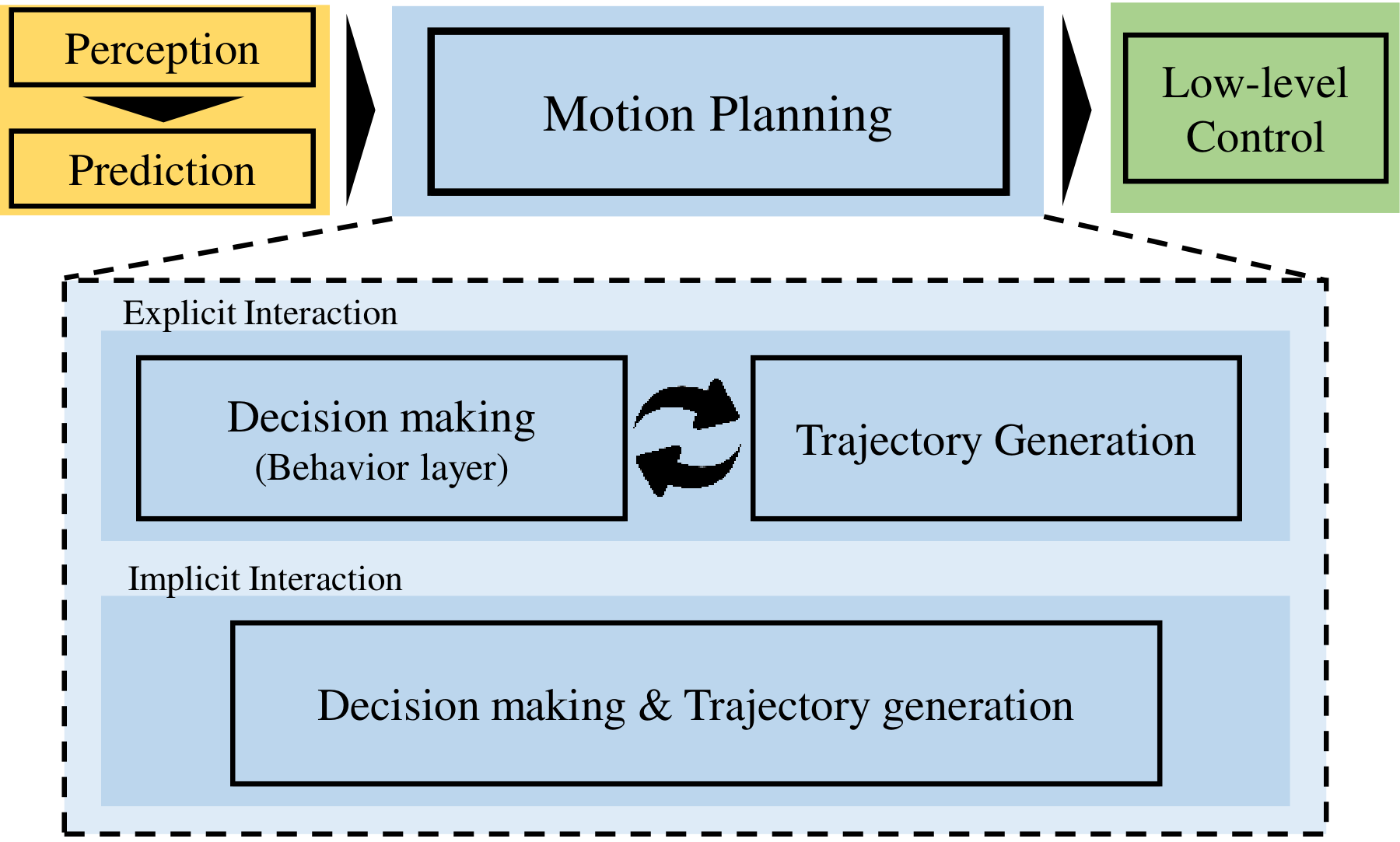
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).
Read more6/11/2024

0
Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
Read more6/6/2024