LIO-EKF: High Frequency LiDAR-Inertial Odometry using Extended Kalman Filters
2311.09887
0
0
💬
Abstract
Odometry estimation is crucial for every autonomous system requiring navigation in an unknown environment. In modern mobile robots, 3D LiDAR-inertial systems are often used for this task. By fusing LiDAR scans and IMU measurements, these systems can reduce the accumulated drift caused by sequentially registering individual LiDAR scans and provide a robust pose estimate. Although effective, LiDAR-inertial odometry systems require proper parameter tuning to be deployed. In this paper, we propose LIO-EKF, a tightly-coupled LiDAR-inertial odometry system based on point-to-point registration and the classical extended Kalman filter scheme. We propose an adaptive data association that considers the relative pose uncertainty, the map discretization errors, and the LiDAR noise. In this way, we can substantially reduce the parameters to tune for a given type of environment. The experimental evaluation suggests that the proposed system performs on par with the state-of-the-art LiDAR-inertial odometry pipelines but is significantly faster in computing the odometry. The source code of our implementation is publicly available (https://github.com/YibinWu/LIO-EKF).
Create account to get full access
Overview
- Odometry estimation is crucial for autonomous systems navigating unknown environments
- Modern mobile robots often use 3D LiDAR-inertial systems for this task
- Fusing LiDAR scans and IMU measurements can reduce accumulated drift and provide robust pose estimates
- LiDAR-inertial odometry systems require proper parameter tuning for deployment
Plain English Explanation
Odometry is the process of estimating the position and orientation of a robot or vehicle as it moves through an environment. This is a crucial capability for autonomous systems that need to navigate without a pre-defined map, such as self-driving cars or robots exploring an unknown area.
In modern mobile robots, a common approach is to use a combination of 3D LiDAR (Light Detection and Ranging) sensors and inertial measurement units (IMUs) to estimate the robot's odometry. LiDAR sensors can create detailed 3D maps of the environment by bouncing lasers off surrounding objects, while IMUs measure the robot's acceleration and rotation. By fusing the data from these two sensors, the robot can reduce the error that builds up when only relying on one sensor type (link to LIKO-LIDAR-INERTIAL-KINEMATIC-ODOMETRY-BIPEDAL-ROBOTS).
However, properly tuning the parameters of these LiDAR-inertial odometry systems can be challenging, as the sensors need to be calibrated for the specific environment. In this paper, the researchers propose a new system called LIO-EKF that aims to reduce the amount of parameter tuning required.
Technical Explanation
The LIO-EKF system uses a tightly-coupled approach to fuse the LiDAR and IMU data. It relies on point-to-point registration, which matches up the 3D points in consecutive LiDAR scans, and the extended Kalman filter, a common technique for state estimation.
The key innovation in LIO-EKF is an adaptive data association algorithm that considers the uncertainty in the relative pose, the discretization errors in the map, and the noise in the LiDAR measurements (link to LOG-LIO2-LIDAR-INERTIAL-ODOMETRY-EFFICIENT-UNCERTAINTY). This helps the system automatically adjust to different environments without requiring extensive manual parameter tuning.
The researchers evaluated LIO-EKF against other state-of-the-art LiDAR-inertial odometry pipelines and found that it performed on par in terms of accuracy, but was significantly faster at computing the odometry (link to COIN-LIO-COMPLEMENTARY-INTENSITY-AUGMENTED-LIDAR-INERTIAL, link to LIO-GVM-ACCURATE-TIGHTLY-COUPLED-LIDAR-INERTIAL, link to 2DLIW-SLAM2D-LIDAR-INERTIAL-WHEEL-ODOMETRY-REAL). The source code for LIO-EKF is publicly available on GitHub.
Critical Analysis
The paper provides a thorough evaluation of the LIO-EKF system and demonstrates its effectiveness compared to other state-of-the-art approaches. However, the researchers do not delve into the potential limitations or caveats of their method.
For example, the adaptive data association algorithm may not perform as well in highly dynamic environments where the relative pose uncertainty and map discretization errors are constantly changing. Additionally, the computational efficiency of LIO-EKF may come at the cost of reduced robustness or flexibility in handling different sensor configurations or environmental conditions.
Further research could explore the performance of LIO-EKF in a wider range of scenarios, including more challenging environments or with different sensor setups. Investigating the trade-offs between speed, accuracy, and parameter tuning complexity would also provide valuable insights for practitioners looking to deploy LiDAR-inertial odometry systems in real-world applications.
Conclusion
The LIO-EKF system proposed in this paper represents an important step forward in reducing the complexity of deploying LiDAR-inertial odometry for autonomous systems. By incorporating an adaptive data association algorithm, the system can maintain accurate pose estimates while requiring less manual parameter tuning.
The researchers have made the LIO-EKF implementation publicly available, which should facilitate further research and development in this area. As autonomous systems continue to play an increasingly important role in our lives, advancements in odometry estimation like LIO-EKF will be crucial for enabling these technologies to navigate and operate safely in complex, unknown environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
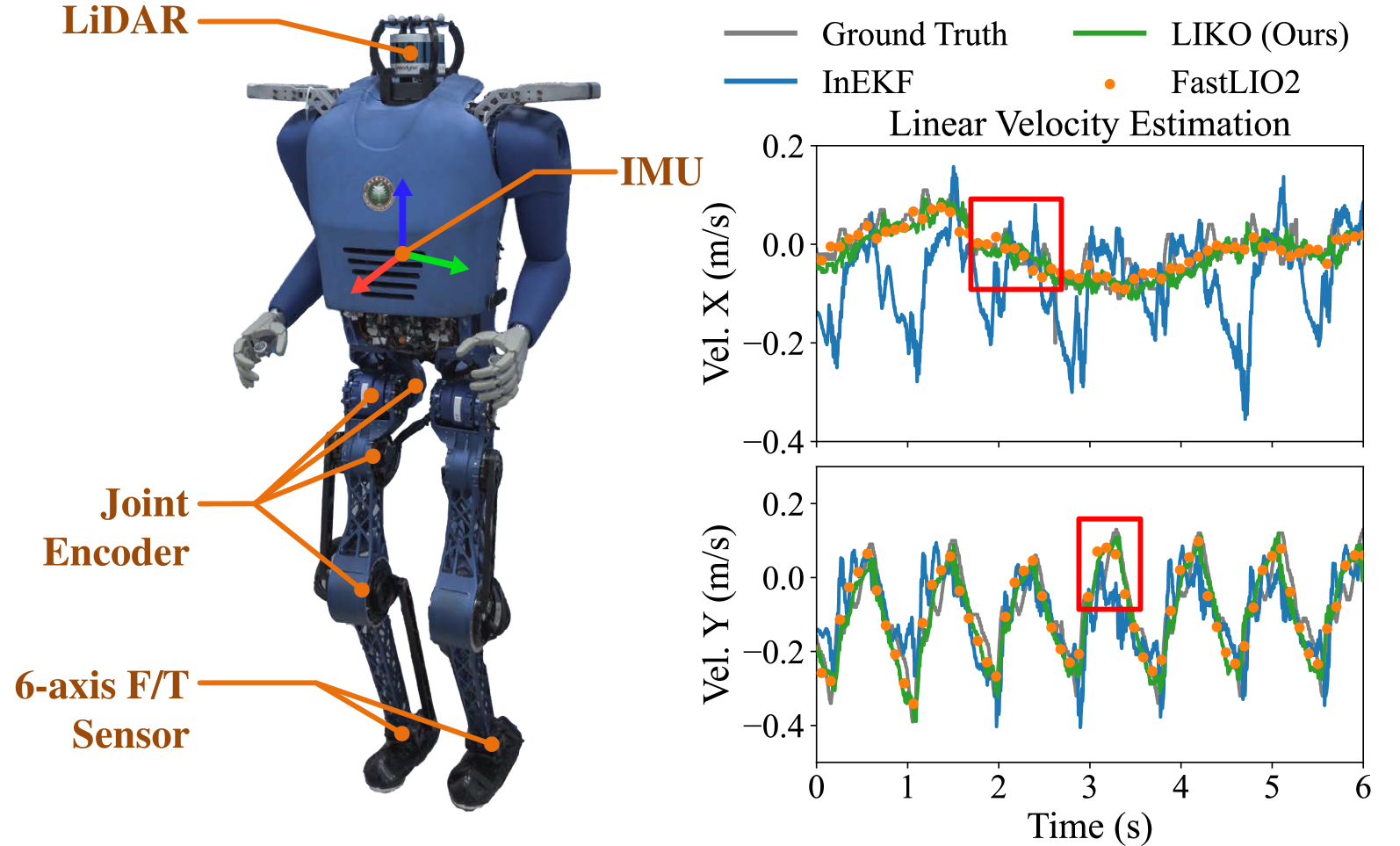
LIKO: LiDAR, Inertial, and Kinematic Odometry for Bipedal Robots
Qingrui Zhao, Mingyuan Li, Yongliang Shi, Xuechao Chen, Zhangguo Yu, Lianqiang Han, Zhenyuan Fu, Jintao Zhang, Chao Li, Yuanxi Zhang, Qiang Huang
0
0
High-frequency and accurate state estimation is crucial for biped robots. This paper presents a tightly-coupled LiDAR-Inertial-Kinematic Odometry (LIKO) for biped robot state estimation based on an iterated extended Kalman filter. Beyond state estimation, the foot contact position is also modeled and estimated. This allows for both position and velocity updates from kinematic measurement. Additionally, the use of kinematic measurement results in an increased output state frequency of about 1kHz. This ensures temporal continuity of the estimated state and makes it practical for control purposes of biped robots. We also announce a biped robot dataset consisting of LiDAR, inertial measurement unit (IMU), joint encoders, force/torque (F/T) sensors, and motion capture ground truth to evaluate the proposed method. The dataset is collected during robot locomotion, and our approach reached the best quantitative result among other LIO-based methods and biped robot state estimation algorithms. The dataset and source code will be available at https://github.com/Mr-Zqr/LIKO.
4/30/2024
Eigen Is All You Need: Efficient Lidar-Inertial Continuous-Time Odometry with Internal Association
Thien-Minh Nguyen, Xinhang Xu, Tongxing Jin, Yizhuo Yang, Jianping Li, Shenghai Yuan, Lihua Xie
0
0
In this paper, we propose a continuous-time lidar-inertial odometry (CT-LIO) system named SLICT2, which promotes two main insights. One, contrary to conventional wisdom, CT-LIO algorithm can be optimized by linear solvers in only a few iterations, which is more efficient than commonly used nonlinear solvers. Two, CT-LIO benefits more from the correct association than the number of iterations. Based on these ideas, we implement our method with a customized solver where the feature association process is performed immediately after each incremental step, and the solution can converge within a few iterations. Our implementation can achieve real-time performance with a high density of control points while yielding competitive performance in highly dynamical motion scenarios. We demonstrate the advantages of our method by comparing with other existing state-of-the-art CT-LIO methods. The source code will be released for the benefit of the community.
6/10/2024

LOG-LIO2: A LiDAR-Inertial Odometry with Efficient Uncertainty Analysis
Kai Huang, Junqiao Zhao, Jiaye Lin, Zhongyang Zhu, Shuangfu Song, Chen Ye, Tiantian Feng
0
0
Uncertainty in LiDAR measurements, stemming from factors such as range sensing, is crucial for LIO (LiDAR-Inertial Odometry) systems as it affects the accurate weighting in the loss function. While recent LIO systems address uncertainty related to range sensing, the impact of incident angle on uncertainty is often overlooked by the community. Moreover, the existing uncertainty propagation methods suffer from computational inefficiency. This paper proposes a comprehensive point uncertainty model that accounts for both the uncertainties from LiDAR measurements and surface characteristics, along with an efficient local uncertainty analytical method for LiDAR-based state estimation problem. We employ a projection operator that separates the uncertainty into the ray direction and its orthogonal plane. Then, we derive incremental Jacobian matrices of eigenvalues and eigenvectors w.r.t. points, which enables a fast approximation of uncertainty propagation. This approach eliminates the requirement for redundant traversal of points, significantly reducing the time complexity of uncertainty propagation from $mathcal{O} (n)$ to $mathcal{O} (1)$ when a new point is added. Simulations and experiments on public datasets are conducted to validate the accuracy and efficiency of our formulations. The proposed methods have been integrated into a LIO system, which is available at https://github.com/tiev-tongji/LOG-LIO2.
5/3/2024
MAD-ICP: It Is All About Matching Data -- Robust and Informed LiDAR Odometry
Simone Ferrari, Luca Di Giammarino, Leonardo Brizi, Giorgio Grisetti
0
0
LiDAR odometry is the task of estimating the ego-motion of the sensor from sequential laser scans. This problem has been addressed by the community for more than two decades, and many effective solutions are available nowadays. Most of these systems implicitly rely on assumptions about the operating environment, the sensor used, and motion pattern. When these assumptions are violated, several well-known systems tend to perform poorly. This paper presents a LiDAR odometry system that can overcome these limitations and operate well under different operating conditions while achieving performance comparable with domain-specific methods. Our algorithm follows the well-known ICP paradigm that leverages a PCA-based kd-tree implementation that is used to extract structural information about the clouds being registered and to compute the minimization metric for the alignment. The drift is bound by managing the local map based on the estimated uncertainty of the tracked pose. To benefit the community, we release an open-source C++ anytime real-time implementation.
5/10/2024