LIKO: LiDAR, Inertial, and Kinematic Odometry for Bipedal Robots

0
Sign in to get full access
Overview
- This paper presents LIKO, a new odometry system that combines LiDAR, inertial, and kinematic sensors to estimate the pose of bipedal robots.
- The proposed approach aims to improve the accuracy and robustness of pose estimation compared to existing methods.
- LIKO integrates data from multiple sensors to provide a tightly coupled, self-contained odometry solution for bipedal robots.
Plain English Explanation
LIKO is a new system that helps robots that walk on two legs (bipedal robots) figure out where they are and which way they're facing. It does this by using three different types of sensors:
- LiDAR: A sensor that uses lasers to create a 3D map of the robot's surroundings.
- Inertial sensors: Sensors that measure the robot's movements and orientation, like accelerometers and gyroscopes.
- Kinematic sensors: Sensors that track the position and movement of the robot's joints and limbs.
By combining data from all these sensors, LIKO can estimate the robot's position and orientation more accurately and reliably than using just one type of sensor alone. This is important for robots that need to navigate complex environments and stay on track.
Technical Explanation
The paper introduces a new odometry system called LIKO (LiDAR, Inertial, and Kinematic Odometry) that integrates data from LiDAR, inertial, and kinematic sensors to estimate the pose of bipedal robots. LIKO uses a tightly coupled sensor fusion approach to combine the complementary information from these different sensor modalities.
The key technical elements of LIKO include:
- A LiDAR-based mapping and localization module that leverages the 3D point cloud data to build a map and localize the robot within it.
- An inertial measurement unit (IMU) based orientation estimation component that provides high-frequency updates on the robot's attitude.
- A kinematic odometry module that tracks the position and motion of the robot's joints and limbs.
- A sensor fusion framework that tightly couples the LiDAR, inertial, and kinematic data to produce a robust and accurate estimate of the robot's full 6-DoF pose.
The authors evaluate LIKO's performance on both simulated and real-world datasets, demonstrating improved accuracy and robustness compared to existing state-of-the-art odometry solutions.
Critical Analysis
The paper provides a comprehensive and well-designed odometry system for bipedal robots, addressing several key challenges in this domain. The tight coupling of LiDAR, inertial, and kinematic sensors is a promising approach to enhance the reliability and accuracy of pose estimation.
However, the authors acknowledge that LIKO has some limitations, such as the need for an initial calibration process and the dependency on the availability of a prior map for localization. Additionally, the system may not perform as well in highly dynamic or cluttered environments where the LiDAR-based mapping and localization could be more challenging.
Further research could explore ways to address these limitations, such as incorporating more advanced mapping and localization techniques, or exploring the integration of additional sensor modalities (e.g., visual or GPS data) to improve the robustness of the system.
Conclusion
The LIKO odometry system presented in this paper represents a significant advancement in the field of pose estimation for bipedal robots. By tightly integrating LiDAR, inertial, and kinematic sensors, the authors have developed a comprehensive solution that demonstrates improved accuracy and reliability compared to existing approaches.
The successful evaluation of LIKO in both simulated and real-world environments suggests that this technology has the potential to enhance the navigation and autonomy of bipedal robots, enabling them to operate more effectively in complex and dynamic environments. As the field of robotics continues to evolve, innovations like LIKO will play an important role in expanding the capabilities of these systems and advancing their practical applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
LIKO: LiDAR, Inertial, and Kinematic Odometry for Bipedal Robots
Qingrui Zhao, Mingyuan Li, Yongliang Shi, Xuechao Chen, Zhangguo Yu, Lianqiang Han, Zhenyuan Fu, Jintao Zhang, Chao Li, Yuanxi Zhang, Qiang Huang
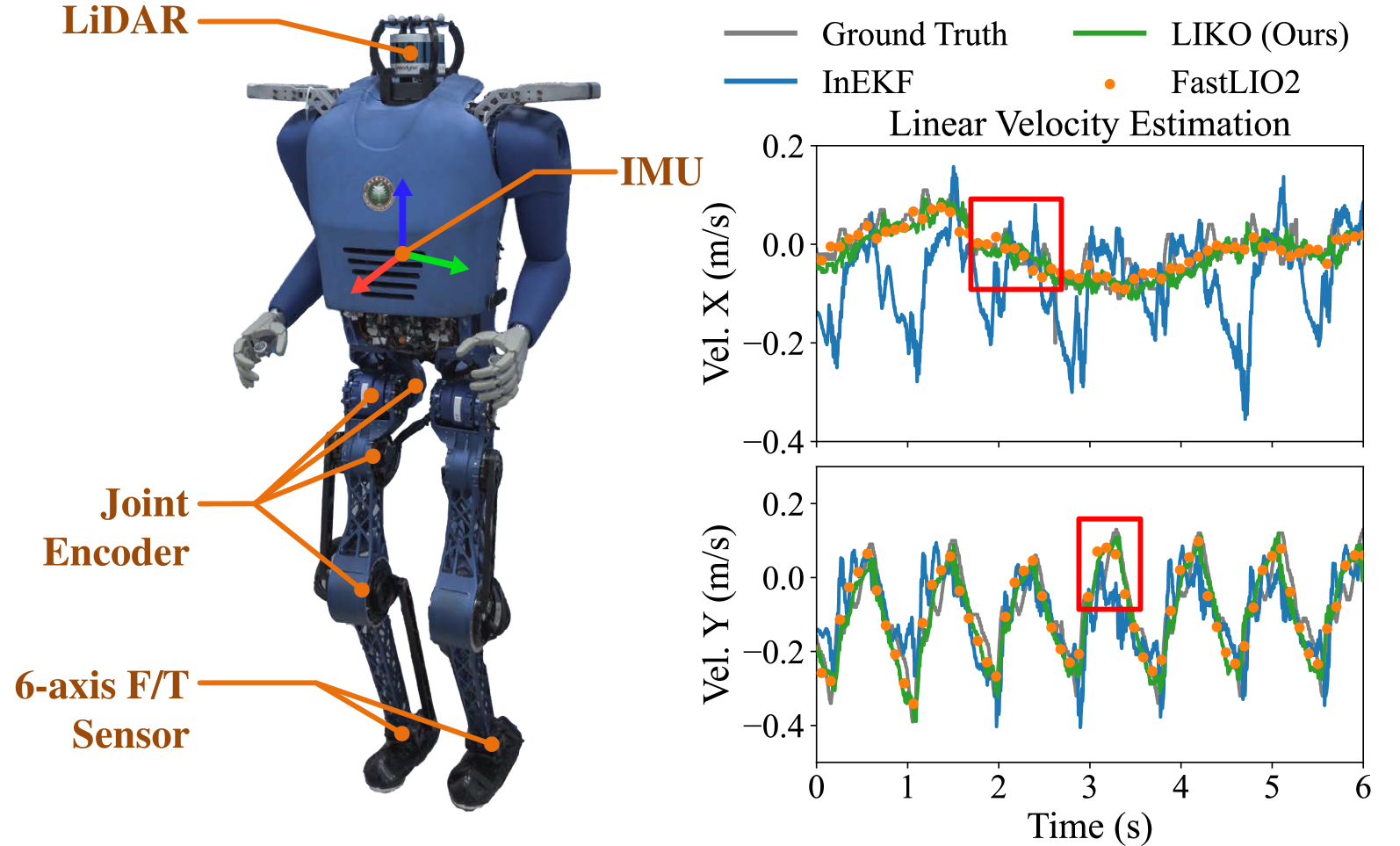
High-frequency and accurate state estimation is crucial for biped robots. This paper presents a tightly-coupled LiDAR-Inertial-Kinematic Odometry (LIKO) for biped robot state estimation based on an iterated extended Kalman filter. Beyond state estimation, the foot contact position is also modeled and estimated. This allows for both position and velocity updates from kinematic measurement. Additionally, the use of kinematic measurement results in an increased output state frequency of about 1kHz. This ensures temporal continuity of the estimated state and makes it practical for control purposes of biped robots. We also announce a biped robot dataset consisting of LiDAR, inertial measurement unit (IMU), joint encoders, force/torque (F/T) sensors, and motion capture ground truth to evaluate the proposed method. The dataset is collected during robot locomotion, and our approach reached the best quantitative result among other LIO-based methods and biped robot state estimation algorithms. The dataset and source code will be available at https://github.com/Mr-Zqr/LIKO.
Read more4/30/2024
💬
0
LIO-EKF: High Frequency LiDAR-Inertial Odometry using Extended Kalman Filters
Yibin Wu, Tiziano Guadagnino, Louis Wiesmann, Lasse Klingbeil, Cyrill Stachniss, Heiner Kuhlmann
Odometry estimation is crucial for every autonomous system requiring navigation in an unknown environment. In modern mobile robots, 3D LiDAR-inertial systems are often used for this task. By fusing LiDAR scans and IMU measurements, these systems can reduce the accumulated drift caused by sequentially registering individual LiDAR scans and provide a robust pose estimate. Although effective, LiDAR-inertial odometry systems require proper parameter tuning to be deployed. In this paper, we propose LIO-EKF, a tightly-coupled LiDAR-inertial odometry system based on point-to-point registration and the classical extended Kalman filter scheme. We propose an adaptive data association that considers the relative pose uncertainty, the map discretization errors, and the LiDAR noise. In this way, we can substantially reduce the parameters to tune for a given type of environment. The experimental evaluation suggests that the proposed system performs on par with the state-of-the-art LiDAR-inertial odometry pipelines but is significantly faster in computing the odometry. The source code of our implementation is publicly available (https://github.com/YibinWu/LIO-EKF).
Read more5/9/2024

0
LiDAR-Inertial Odometry Based on Extended Kalman Filter
Naoki Akai, Takumi Nakao
LiDAR-Inertial Odometry (LIO) is typically implemented using an optimization-based approach, with the factor graph often being employed due to its capability to seamlessly integrate residuals from both LiDAR and IMU measurements. Conversely, a recent study has demonstrated that accurate LIO can also be achieved using a loosely-coupled method. Inspired by this advancements, we present a LIO method that leverages the recursive Bayes filter, solved via the Extended Kalman Filter (EKF) - herein referred to as KLIO. Within KLIO, prior and likelihood distributions are computed using IMU preintegration and scan matching between LiDAR and local map point clouds, and the pose, velocity, and IMU biases are updated through the EKF process. Through experiments with the Newer College dataset, we demonstrate that KLIO achieves precise trajectory tracking and mapping. Its accuracy is comparable to that of the state-of-the-art methods in both tightly- and loosely-coupled methods.
Read more7/23/2024

0
The Kinetics Observer: A Tightly Coupled Estimator for Legged Robots
Arnaud Demont (CNRS-AIST JRL, LISV), Mehdi Benallegue (CNRS-AIST JRL), Abdelaziz Benallegue (LISV, UVSQ), Pierre Gergondet (CNRS-AIST JRL), Antonin Dallard (LIRMM), Rafael Cisneros (CNRS-AIST JRL), Masaki Murooka (CNRS-AIST JRL), Fumio Kanehiro (CNRS-AIST JRL)
In this paper, we propose the Kinetics Observer, a novel estimator addressing the challenge of state estimation for legged robots using proprioceptive sensors (encoders, IMU and force/torque sensors). Based on a Multiplicative Extended Kalman Filter, the Kinetics Observer allows the real-time simultaneous estimation of contact and perturbation forces, and of the robot's kinematics, which are accurate enough to perform proprioceptive odometry. Thanks to a visco-elastic model of the contacts linking their kinematics to the ones of the centroid of the robot, the Kinetics Observer ensures a tight coupling between the whole-body kinematics and dynamics of the robot. This coupling entails a redundancy of the measurements that enhances the robustness and the accuracy of the estimation. This estimator was tested on two humanoid robots performing long distance walking on even terrain and non-coplanar multi-contact locomotion.
Read more6/21/2024