Local search for valued constraint satisfaction parameterized by treedepth

0
🤔
Sign in to get full access
Overview
- The paper investigates the structure of ascents in fitness landscapes from Valued Constraint Satisfaction Problems (VCSPs), which are a type of optimization problem.
- It proves that for VCSPs with constraint graphs of logarithmic treedepth, there always exist short ascents to local peaks.
- However, the paper shows that with higher treedepth, such as loglog treedepth or polylog treedepth, longer, superpolynomial ascents can exist, which can hinder local search algorithms.
- The findings suggest that studying sparse VCSPs can provide insights into the limitations of local search methods.
Plain English Explanation
The paper looks at a type of optimization problem called a Valued Constraint Satisfaction Problem (VCSP). These problems involve finding the best solution from a set of options, where each option has a value or "score" that needs to be maximized.
Imagine you're trying to plan the best route for a delivery driver. There are various constraints, like the driver's schedule, traffic patterns, and customer locations. The goal is to find the route that maximizes the total value (e.g., number of packages delivered, customer satisfaction).
The paper focuses on how the structure of these VCSP problems, specifically the "treedepth" of their constraint graphs, can impact the ability of local search algorithms to efficiently find good solutions.
Treedepth is a measure of how "tree-like" the constraint graph is. A low treedepth means the graph has a simple, tree-like structure, while a high treedepth indicates a more complex, tangled structure.
The key finding is that for VCSPs with low treedepth (like logarithmic treedepth), there are always short "ascents" or paths to local peaks in the fitness landscape. This suggests that local search algorithms should be able to efficiently find good solutions in these types of problems.
However, the paper shows that as the treedepth increases (e.g., loglog treedepth or polylog treedepth), the ascents can become much longer and harder for local search to navigate. This means local search algorithms may struggle to find optimal solutions in these more complex VCSP problems.
Overall, the results suggest that studying the structure of VCSPs, particularly their treedepth, can provide valuable insights into the limitations of local search methods and guide the development of more efficient optimization algorithms.
Technical Explanation
The paper analyzes the structure of ascents in fitness landscapes generated from Valued Constraint Satisfaction Problems (VCSPs). VCSPs are a class of optimization problems where the goal is to find an assignment of values to variables that maximizes a weighted sum of constraint satisfaction scores.
The key technical result is a proof that for VCSPs with a constraint graph of treedepth $d$, there always exists an ascent of length $2^{d + 1} \cdot n$ from any initial assignment to a local peak, where $n$ is the number of variables. This means that short ascents are guaranteed to exist in the fitness landscapes of VCSPs with logarithmic treedepth, such as those with bounded treewidth.
However, the paper also shows that the situation becomes more challenging as the treedepth increases. Specifically, it proves that:
- With loglog treedepth, there exist VCSPs with superpolynomial ascents.
- For polylog treedepth, there are initial assignments from which all ascents are superpolynomial.
These results suggest that the structure of sparse VCSPs, as characterized by their treedepth, can pose significant challenges for local search algorithms, which may struggle to find and follow short ascents to local peaks. The findings highlight the importance of understanding the complexity of the fitness landscapes generated by VCSPs, which can inform the design of more efficient optimization algorithms.
Critical Analysis
The paper provides valuable insights into the limitations of local search algorithms for solving Valued Constraint Satisfaction Problems (VCSPs), particularly in the context of sparse problem instances with high treedepth.
One notable strength of the research is the rigorous mathematical analysis of the structure of ascents in VCSP fitness landscapes. The proofs demonstrating the existence of short ascents for low treedepth and the emergence of superpolynomial ascents for higher treedepth offer a deep understanding of the underlying complexity of these optimization problems.
However, the paper does not address the practical implications of these findings in detail. While the theoretical results suggest that local search may struggle with high-treedepth VCSPs, it would be helpful to see empirical evidence or a discussion of how these insights could inform the development of more efficient optimization algorithms for such problems.
Additionally, the paper does not explore the potential connections between the treedepth of VCSP constraint graphs and other well-studied graph properties, such as treewidth or pathwidth. Investigating these relationships could provide further insights into the structural complexity of VCSPs and guide the design of specialized algorithms.
Overall, the paper makes a valuable contribution to the understanding of the challenges faced by local search algorithms in the context of sparse VCSPs. However, further research is needed to fully explore the practical implications of these findings and to develop more effective optimization strategies for this important class of problems.
Conclusion
This paper delves into the structure of ascents in fitness landscapes generated from Valued Constraint Satisfaction Problems (VCSPs), a type of optimization problem. The key finding is that the treedepth of the VCSP constraint graph plays a crucial role in determining the complexity of the fitness landscape.
For VCSPs with low treedepth, such as those with logarithmic treedepth, the paper proves that short ascents to local peaks always exist, suggesting that local search algorithms should be able to efficiently find good solutions. However, as the treedepth increases, the situation becomes more challenging, with the existence of superpolynomial ascents, which can hinder the effectiveness of local search.
These results provide valuable insights into the limitations of local search algorithms for solving sparse VCSPs and highlight the importance of understanding the structural complexity of optimization problems. By studying the relationship between VCSP properties, such as treedepth, and the characteristics of their fitness landscapes, researchers can develop more efficient optimization strategies and algorithms that can better navigate the challenges posed by these complex problems.
Overall, this paper contributes to the ongoing effort to bridge the gap between the theoretical understanding of optimization problems and the practical challenges faced by real-world applications, paving the way for more effective problem-solving approaches in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤔
0
Local search for valued constraint satisfaction parameterized by treedepth
Artem Kaznatcheev
Sometimes local search algorithms cannot efficiently find even local peaks. To understand why, I look at the structure of ascents in fitness landscapes from valued constraint satisfaction problems (VCSPs). Given a VCSP with a constraint graph of treedepth $d$, I prove that from any initial assignment there always exists an ascent of length $2^{d + 1} cdot n$ to a local peak. This means that short ascents always exist in fitness landscapes from constraint graphs of logarithmic treedepth, and thus also for all VCSPs of bounded treewidth. But this does not mean that local search algorithms will always find and follow such short ascents in sparse VCSPs. I show that with loglog treedepth, superpolynomial ascents exist; and for polylog treedepth, there are initial assignments from which all ascents are superpolynomial. Together, these results suggest that the study of sparse VCSPs can help us better understand the barriers to efficient local search.
Read more5/22/2024
👀
0
Low-Depth Spatial Tree Algorithms
Yves Baumann, Tal Ben-Nun, Maciej Besta, Lukas Gianinazzi, Torsten Hoefler, Piotr Luczynski
Contemporary accelerator designs exhibit a high degree of spatial localization, wherein two-dimensional physical distance determines communication costs between processing elements. This situation presents considerable algorithmic challenges, particularly when managing sparse data, a pivotal component in progressing data science. The spatial computer model quantifies communication locality by weighting processor communication costs by distance, introducing a term named energy. Moreover, it integrates depth, a widely-utilized metric, to promote high parallelism. We propose and analyze a framework for efficient spatial tree algorithms within the spatial computer model. Our primary method constructs a spatial tree layout that optimizes the locality of the neighbors in the compute grid. This approach thereby enables locality-optimized messaging within the tree. Our layout achieves a polynomial factor improvement in energy compared to utilizing a PRAM approach. Using this layout, we develop energy-efficient treefix sum and lowest common ancestor algorithms, which are both fundamental building blocks for other graph algorithms. With high probability, our algorithms exhibit near-linear energy and poly-logarithmic depth. Our contributions augment a growing body of work demonstrating that computations can have both high spatial locality and low depth. Moreover, our work constitutes an advancement in the spatial layout of irregular and sparse computations.
Read more5/8/2024
0
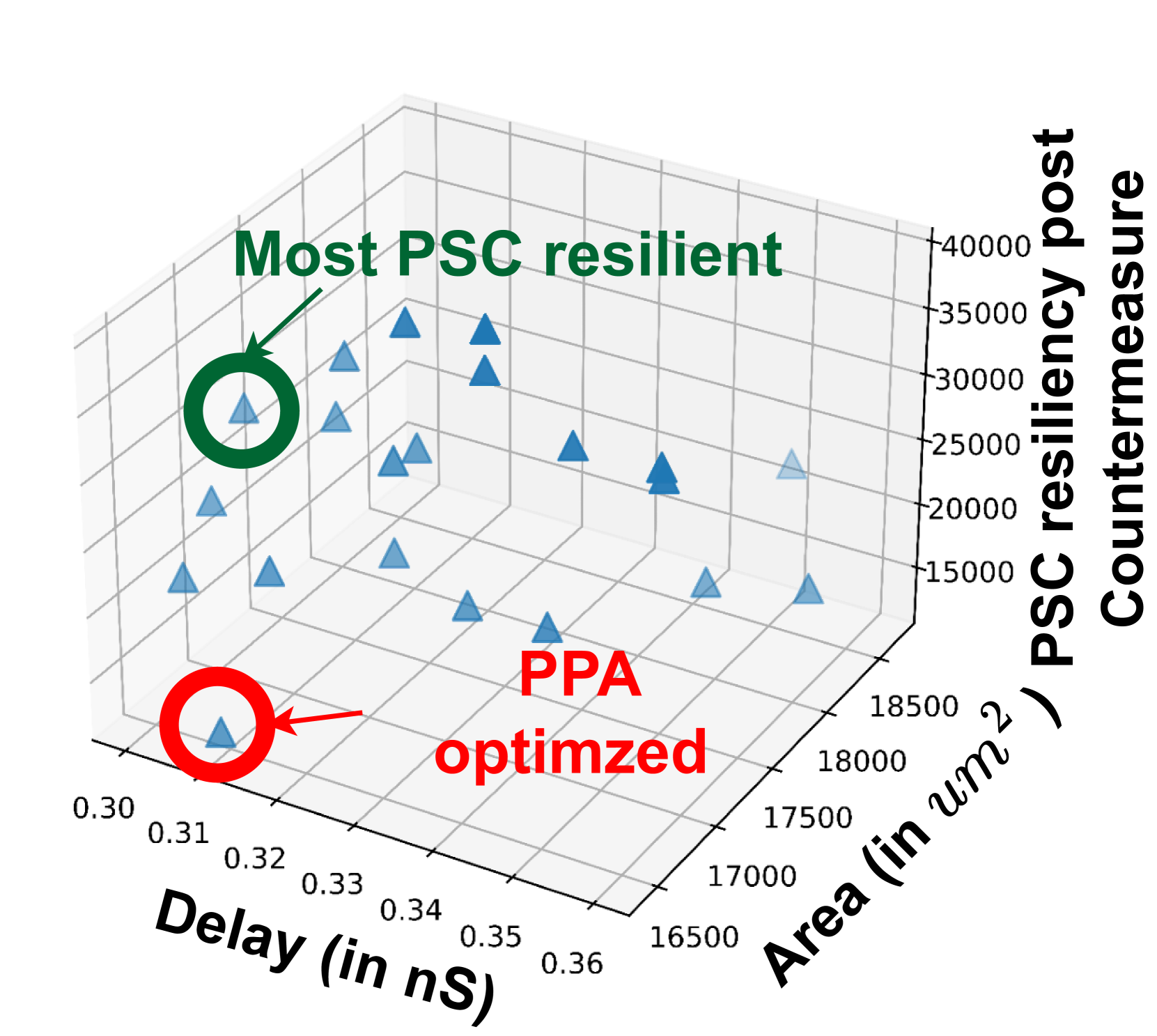
ASCENT: Amplifying Power Side-Channel Resilience via Learning & Monte-Carlo Tree Search
Jitendra Bhandari, Animesh Basak Chowdhury, Mohammed Nabeel, Ozgur Sinanoglu, Siddharth Garg, Ramesh Karri, Johann Knechtel
Power side-channel (PSC) analysis is pivotal for securing cryptographic hardware. Prior art focused on securing gate-level netlists obtained as-is from chip design automation, neglecting all the complexities and potential side-effects for security arising from the design automation process. That is, automation traditionally prioritizes power, performance, and area (PPA), sidelining security. We propose a security-first approach, refining the logic synthesis stage to enhance the overall resilience of PSC countermeasures. We introduce ASCENT, a learning-and-search-based framework that (i) drastically reduces the time for post-design PSC evaluation and (ii) explores the security-vs-PPA design space. Thus, ASCENT enables an efficient exploration of a large number of candidate netlists, leading to an improvement in PSC resilience compared to regular PPA-optimized netlists. ASCENT is up to 120x faster than traditional PSC analysis and yields a 3.11x improvement for PSC resilience of state-of-the-art PSC countermeasures
Read more7/2/2024
🌐
0
Brief Announcement: Distributed Unconstrained Local Search for Multilevel Graph Partitioning
Peter Sanders, Daniel Seemaier
Partitioning a graph into blocks of roughly equal weight while cutting only few edges is a fundamental problem in computer science with numerous practical applications. While shared-memory parallel partitioners have recently matured to achieve the same quality as widely used sequential partitioners, there is still a pronounced quality gap between distributed partitioners and their sequential counterparts. In this work, we shrink this gap considerably by describing the engineering of an unconstrained local search algorithm suitable for distributed partitioners. We integrate the proposed algorithm in a distributed multilevel partitioner. Our extensive experiments show that the resulting algorithm scales to thousands of PEs while computing cuts that are, on average, only 3.5% larger than those of a state-of-the-art high-quality shared-memory partitioner. Compared to previous distributed partitioners, we obtain on average 6.8% smaller cuts than the best-performing competitor while being more than 9 times faster.
Read more6/6/2024