Long-Horizon Planning for Multi-Agent Robots in Partially Observable Environments

0

Sign in to get full access
Overview
- This paper presents a long-horizon planning approach for multi-agent robots operating in partially observable environments.
- The proposed method combines hierarchical planning, model predictive control, and deep reinforcement learning to enable robots to navigate complex environments and collaborate on tasks.
- The approach is evaluated in simulation and on a real-world quadrupedal robot, demonstrating its ability to handle challenging navigation and manipulation problems.
Plain English Explanation
The paper discusses a new way to plan and control the movements of multiple robots working together in environments where they can't fully see what's around them. This is a common challenge in robotics, as robots often have limited sensors and have to make decisions without complete information.
The key idea is to use a combination of different planning and control techniques. The robots first use high-level planning to map out a general strategy for accomplishing their goals. They then use model predictive control to fine-tune their movements in the short term, adjusting to changes in the environment. Finally, they rely on deep reinforcement learning to help them learn from experience and improve their performance over time.
By integrating these complementary approaches, the robots are able to navigate complex environments, coordinate their actions, and complete tasks that would be difficult for a single robot acting alone. For example, the paper demonstrates the robots' ability to [internal link: https://aimodels.fyi/papers/arxiv/long-horizon-locomotion-manipulation-quadrupedal-robot-large] traverse rough terrain and [internal link: https://aimodels.fyi/papers/arxiv/language-augmented-symbolic-planner-open-world-task] manipulate objects in their environment.
This work represents an important step towards more capable and autonomous multi-robot systems that can operate in the real world, where information is often incomplete or uncertain.
Technical Explanation
The paper proposes a hierarchical planning and control framework for multi-agent robots in partially observable environments. At the highest level, the robots use a symbolic planner to formulate a long-term strategy for accomplishing their goals, as described in [internal link: https://aimodels.fyi/papers/arxiv/language-augmented-symbolic-planner-open-world-task].
This high-level plan is then refined and executed using model predictive control (MPC), which allows the robots to adapt their movements in real-time based on their observations of the environment. The MPC component is guided by a deep reinforcement learning (RL) model that has been trained to optimize the robots' behavior, as discussed in [internal link: https://aimodels.fyi/papers/arxiv/llm-state-open-world-state-representation-long] and [internal link: https://aimodels.fyi/papers/arxiv/plan-seq-learn-language-model-guided-rl].
By combining this hierarchical approach with the robots' ability to reason about each other's intentions and coordinate their actions, as enabled by the [internal link: https://aimodels.fyi/papers/arxiv/theory-mind-multi-agent-collaboration-via-large] methodology, the system is able to handle a wide range of challenges in partially observable environments.
The authors evaluate their approach in simulation and on a real-world quadrupedal robot, demonstrating its ability to navigate complex terrains and manipulate objects in the environment. The results show that the robots can effectively collaborate to accomplish tasks that would be difficult for a single agent to handle on its own.
Critical Analysis
The paper presents a comprehensive approach to long-horizon planning and control for multi-agent robots, and the results are impressive. However, there are a few potential limitations and areas for further research that could be considered.
One potential concern is the reliance on a symbolic planner, which may struggle to capture the full complexity of real-world environments. While the combination with MPC and deep RL helps to address this, the authors could explore more end-to-end learning-based approaches that can better handle the uncertainty and dynamism of partially observable settings.
Additionally, the evaluation is primarily focused on simulation and a single quadrupedal robot platform. It would be valuable to see how the approach scales to larger teams of robots and more diverse environments and tasks, to better understand its broader applicability and limitations.
Finally, the paper does not delve into the computational and resource requirements of the proposed framework, which could be an important consideration for real-world deployment, especially in resource-constrained scenarios. Exploring ways to optimize the efficiency of the system would be a useful direction for future research.
Overall, this work represents a significant advancement in the field of multi-agent robotics and offers a promising approach for enabling more capable and collaborative robot systems. Continued research and refinement of the ideas presented here could lead to exciting developments in the years to come.
Conclusion
The paper introduces a novel long-horizon planning and control framework for multi-agent robots operating in partially observable environments. By combining hierarchical planning, model predictive control, and deep reinforcement learning, the system is able to navigate complex scenarios, coordinate the robots' actions, and accomplish tasks that would be challenging for individual agents.
The results demonstrate the effectiveness of this approach, both in simulation and on a real-world quadrupedal robot platform. While the paper identifies a few potential areas for improvement, the overall work represents a significant advancement in the field of multi-robot systems and offers promising avenues for future research and development.
As robots continue to play an increasingly important role in our lives, advances like those presented in this paper will be crucial for enabling more capable, autonomous, and collaborative robotic systems that can operate reliably in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Long-Horizon Planning for Multi-Agent Robots in Partially Observable Environments
Siddharth Nayak, Adelmo Morrison Orozco, Marina Ten Have, Vittal Thirumalai, Jackson Zhang, Darren Chen, Aditya Kapoor, Eric Robinson, Karthik Gopalakrishnan, James Harrison, Brian Ichter, Anuj Mahajan, Hamsa Balakrishnan
The ability of Language Models (LMs) to understand natural language makes them a powerful tool for parsing human instructions into task plans for autonomous robots. Unlike traditional planning methods that rely on domain-specific knowledge and handcrafted rules, LMs generalize from diverse data and adapt to various tasks with minimal tuning, acting as a compressed knowledge base. However, LMs in their standard form face challenges with long-horizon tasks, particularly in partially observable multi-agent settings. We propose an LM-based Long-Horizon Planner for Multi-Agent Robotics (LLaMAR), a cognitive architecture for planning that achieves state-of-the-art results in long-horizon tasks within partially observable environments. LLaMAR employs a plan-act-correct-verify framework, allowing self-correction from action execution feedback without relying on oracles or simulators. Additionally, we present MAP-THOR, a comprehensive test suite encompassing household tasks of varying complexity within the AI2-THOR environment. Experiments show that LLaMAR achieves a 30% higher success rate compared to other state-of-the-art LM-based multi-agent planners.
Read more7/16/2024
🌿
0
Scaling Up Natural Language Understanding for Multi-Robots Through the Lens of Hierarchy
Shaojun Xu, Xusheng Luo, Yutong Huang, Letian Leng, Ruixuan Liu, Changliu Liu
Long-horizon planning is hindered by challenges such as uncertainty accumulation, computational complexity, delayed rewards and incomplete information. This work proposes an approach to exploit the task hierarchy from human instructions to facilitate multi-robot planning. Using Large Language Models (LLMs), we propose a two-step approach to translate multi-sentence instructions into a structured language, Hierarchical Linear Temporal Logic (LTL), which serves as a formal representation for planning. Initially, LLMs transform the instructions into a hierarchical representation defined as Hierarchical Task Tree, capturing the logical and temporal relations among tasks. Following this, a domain-specific fine-tuning of LLM translates sub-tasks of each task into flat LTL formulas, aggregating them to form hierarchical LTL specifications. These specifications are then leveraged for planning using off-the-shelf planners. Our framework not only bridges the gap between instructions and algorithmic planning but also showcases the potential of LLMs in harnessing hierarchical reasoning to automate multi-robot task planning. Through evaluations in both simulation and real-world experiments involving human participants, we demonstrate that our method can handle more complex instructions compared to existing methods. The results indicate that our approach achieves higher success rates and lower costs in multi-robot task allocation and plan generation. Demos videos are available at https://youtu.be/7WOrDKxIMIs .
Read more8/16/2024
0
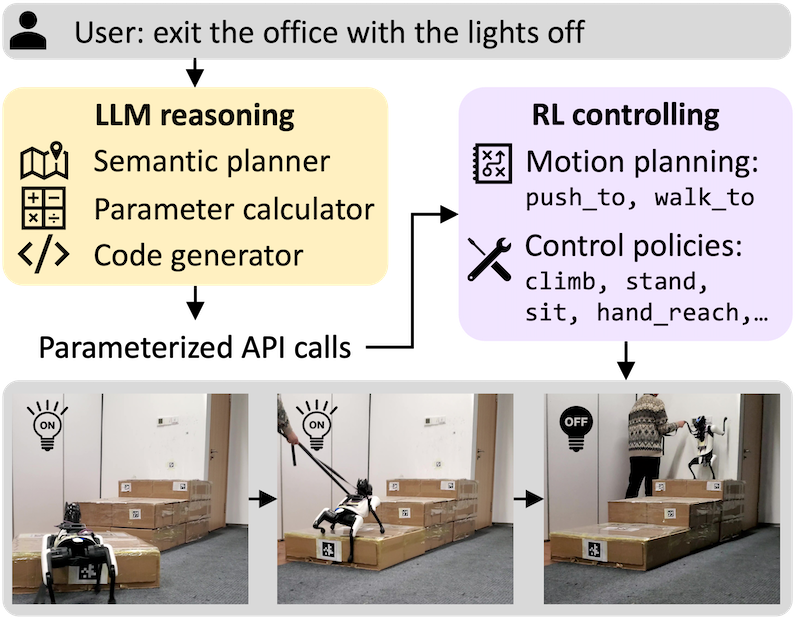
Long-horizon Locomotion and Manipulation on a Quadrupedal Robot with Large Language Models
Yutao Ouyang, Jinhan Li, Yunfei Li, Zhongyu Li, Chao Yu, Koushil Sreenath, Yi Wu
We present a large language model (LLM) based system to empower quadrupedal robots with problem-solving abilities for long-horizon tasks beyond short-term motions. Long-horizon tasks for quadrupeds are challenging since they require both a high-level understanding of the semantics of the problem for task planning and a broad range of locomotion and manipulation skills to interact with the environment. Our system builds a high-level reasoning layer with large language models, which generates hybrid discrete-continuous plans as robot code from task descriptions. It comprises multiple LLM agents: a semantic planner for sketching a plan, a parameter calculator for predicting arguments in the plan, and a code generator to convert the plan into executable robot code. At the low level, we adopt reinforcement learning to train a set of motion planning and control skills to unleash the flexibility of quadrupeds for rich environment interactions. Our system is tested on long-horizon tasks that are infeasible to complete with one single skill. Simulation and real-world experiments show that it successfully figures out multi-step strategies and demonstrates non-trivial behaviors, including building tools or notifying a human for help.
Read more4/9/2024
💬
0
LASP: Surveying the State-of-the-Art in Large Language Model-Assisted AI Planning
Haoming Li, Zhaoliang Chen, Jonathan Zhang, Fei Liu
Effective planning is essential for the success of any task, from organizing a vacation to routing autonomous vehicles and developing corporate strategies. It involves setting goals, formulating plans, and allocating resources to achieve them. LLMs are particularly well-suited for automated planning due to their strong capabilities in commonsense reasoning. They can deduce a sequence of actions needed to achieve a goal from a given state and identify an effective course of action. However, it is frequently observed that plans generated through direct prompting often fail upon execution. Our survey aims to highlight the existing challenges in planning with language models, focusing on key areas such as embodied environments, optimal scheduling, competitive and cooperative games, task decomposition, reasoning, and planning. Through this study, we explore how LLMs transform AI planning and provide unique insights into the future of LM-assisted planning.
Read more9/4/2024