Long-Tailed 3D Detection via 2D Late Fusion
2312.10986
0
0

Abstract
Long-Tailed 3D Object Detection (LT3D) addresses the problem of accurately detecting objects from both common and rare classes. Contemporary multi-modal detectors achieve low AP on rare-classes (e.g., CMT only achieves 9.4 AP on stroller), presumably because training detectors end-to-end with significant class imbalance is challenging. To address this limitation, we delve into a simple late-fusion framework that ensembles independently trained uni-modal LiDAR and RGB detectors. Importantly, such a late-fusion framework allows us to leverage large-scale uni-modal datasets (with more examples for rare classes) to train better uni-modal RGB detectors, unlike prevailing multimodal detectors that require paired multi-modal training data. Notably, our approach significantly improves rare-class detection by 7.2% over prior work. Further, we examine three critical components of our simple late-fusion approach from first principles and investigate whether to train 2D or 3D RGB detectors, whether to match RGB and LiDAR detections in 3D or the projected 2D image plane for fusion, and how to fuse matched detections. Extensive experiments reveal that 2D RGB detectors achieve better recognition accuracy for rare classes than 3D RGB detectors and matching on the 2D image plane mitigates depth estimation errors. Our late-fusion approach achieves 51.4 mAP on the established nuScenes LT3D benchmark, improving over prior work by 5.9 mAP!
Create account to get full access
Overview
- This paper proposes a novel approach called "Long-Tailed 3D Detection via 2D Late Fusion" for improving 3D object detection in long-tailed datasets.
- The method leverages 2D object detection to enhance the performance of 3D detectors, particularly for rare object categories.
- The authors evaluate their approach on the challenging nuScenes dataset and demonstrate significant improvements over existing state-of-the-art 3D detectors.
Plain English Explanation
The paper tackles the problem of 3D object detection, which is an important task for autonomous vehicles and robotics. 3D detection is challenging because objects can appear very differently from different viewpoints and some object categories are much rarer than others in the training data.
The key idea of this work is to use information from 2D object detection to help the 3D detector perform better, especially for the rare object categories. The 2D detector can provide useful cues about the location and appearance of objects, which the 3D detector can leverage to improve its predictions.
The authors evaluate their method on the nuScenes dataset, which is a very diverse and challenging dataset for 3D detection. They show that their 2D-3D fusion approach outperforms existing state-of-the-art 3D detectors, particularly for the long-tail of rare object categories. This is an important advance that could help improve the robustness and reliability of 3D object detection systems.
Technical Explanation
The paper proposes a "Long-Tailed 3D Detection via 2D Late Fusion" approach to address the challenge of long-tailed object categories in 3D object detection. The key insight is to leverage 2D object detection to enhance the performance of 3D detectors, particularly for rare object classes.
The authors develop a two-stage 3D detection pipeline that first performs 2D object detection on camera images, then fuses the 2D and 3D features to refine the 3D bounding box predictions. This "late fusion" strategy allows the 2D and 3D modalities to be optimized separately, which the authors find leads to better performance than earlier fusion approaches.
Experiments on the nuScenes dataset show that the proposed 2D-3D fusion method significantly outperforms existing state-of-the-art 3D detectors, especially for the long-tail of rare object categories. The authors attribute this success to the complementary information provided by the 2D and 3D modalities, which allows the 3D detector to better handle the challenges of long-tailed distributions.
Critical Analysis
The paper makes a compelling case for the benefits of 2D-3D fusion for long-tailed 3D object detection. The proposed approach is well-designed and the experimental results on nuScenes are impressive, with clear gains over existing methods.
However, the authors acknowledge several limitations and areas for further research. For example, the 2D-3D fusion is performed at a late stage, which may not fully leverage the synergies between the two modalities. Exploring earlier fusion strategies or more sophisticated feature integration could potentially lead to even greater performance improvements.
Additionally, the nuScenes dataset, while highly challenging, may not be fully representative of real-world deployment scenarios. Further evaluation on a broader range of datasets and real-world applications would help to better assess the generalizability and practical impact of this work.
Overall, this paper presents a significant advance in 3D object detection and highlights the value of cross-modal fusion for addressing long-tailed distribution challenges. The authors have made a valuable contribution to the field, and their work could inspire further research into enhancing 3D perception through multi-modal integration.
Conclusion
This paper introduces a novel "Long-Tailed 3D Detection via 2D Late Fusion" approach that leverages 2D object detection to improve the performance of 3D detectors, particularly for rare object categories. By fusing 2D and 3D features at a late stage, the method is able to effectively combine the complementary strengths of the two modalities.
Experiments on the nuScenes dataset demonstrate that the proposed approach significantly outperforms existing state-of-the-art 3D detectors, especially for long-tailed object classes. This is an important advancement that could help to improve the reliability and robustness of 3D perception systems, with potential applications in autonomous vehicles, robotics, and beyond.
While the paper presents a compelling solution, it also identifies areas for further research, such as exploring earlier fusion strategies and evaluating the method on a broader range of datasets and real-world scenarios. Nonetheless, this work represents a valuable contribution to the field of 3D object detection and highlights the power of cross-modal integration for addressing challenging perception challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔎
Fully Sparse Fusion for 3D Object Detection
Yingyan Li, Lue Fan, Yang Liu, Zehao Huang, Yuntao Chen, Naiyan Wang, Zhaoxiang Zhang
0
0
Currently prevalent multimodal 3D detection methods are built upon LiDAR-based detectors that usually use dense Bird's-Eye-View (BEV) feature maps. However, the cost of such BEV feature maps is quadratic to the detection range, making it not suitable for long-range detection. Fully sparse architecture is gaining attention as they are highly efficient in long-range perception. In this paper, we study how to effectively leverage image modality in the emerging fully sparse architecture. Particularly, utilizing instance queries, our framework integrates the well-studied 2D instance segmentation into the LiDAR side, which is parallel to the 3D instance segmentation part in the fully sparse detector. This design achieves a uniform query-based fusion framework in both the 2D and 3D sides while maintaining the fully sparse characteristic. Extensive experiments showcase state-of-the-art results on the widely used nuScenes dataset and the long-range Argoverse 2 dataset. Notably, the inference speed of the proposed method under the long-range LiDAR perception setting is 2.7 $times$ faster than that of other state-of-the-art multimodal 3D detection methods. Code will be released at url{https://github.com/BraveGroup/FullySparseFusion}.
4/30/2024

Sparse Points to Dense Clouds: Enhancing 3D Detection with Limited LiDAR Data
Aakash Kumar, Chen Chen, Ajmal Mian, Neils Lobo, Mubarak Shah
0
0
3D detection is a critical task that enables machines to identify and locate objects in three-dimensional space. It has a broad range of applications in several fields, including autonomous driving, robotics and augmented reality. Monocular 3D detection is attractive as it requires only a single camera, however, it lacks the accuracy and robustness required for real world applications. High resolution LiDAR on the other hand, can be expensive and lead to interference problems in heavy traffic given their active transmissions. We propose a balanced approach that combines the advantages of monocular and point cloud-based 3D detection. Our method requires only a small number of 3D points, that can be obtained from a low-cost, low-resolution sensor. Specifically, we use only 512 points, which is just 1% of a full LiDAR frame in the KITTI dataset. Our method reconstructs a complete 3D point cloud from this limited 3D information combined with a single image. The reconstructed 3D point cloud and corresponding image can be used by any multi-modal off-the-shelf detector for 3D object detection. By using the proposed network architecture with an off-the-shelf multi-modal 3D detector, the accuracy of 3D detection improves by 20% compared to the state-of-the-art monocular detection methods and 6% to 9% compare to the baseline multi-modal methods on KITTI and JackRabbot datasets.
4/11/2024

Multimodal 3D Object Detection on Unseen Domains
Deepti Hegde, Suhas Lohit, Kuan-Chuan Peng, Michael J. Jones, Vishal M. Patel
0
0
LiDAR datasets for autonomous driving exhibit biases in properties such as point cloud density, range, and object dimensions. As a result, object detection networks trained and evaluated in different environments often experience performance degradation. Domain adaptation approaches assume access to unannotated samples from the test distribution to address this problem. However, in the real world, the exact conditions of deployment and access to samples representative of the test dataset may be unavailable while training. We argue that the more realistic and challenging formulation is to require robustness in performance to unseen target domains. We propose to address this problem in a two-pronged manner. First, we leverage paired LiDAR-image data present in most autonomous driving datasets to perform multimodal object detection. We suggest that working with multimodal features by leveraging both images and LiDAR point clouds for scene understanding tasks results in object detectors more robust to unseen domain shifts. Second, we train a 3D object detector to learn multimodal object features across different distributions and promote feature invariance across these source domains to improve generalizability to unseen target domains. To this end, we propose CLIX$^text{3D}$, a multimodal fusion and supervised contrastive learning framework for 3D object detection that performs alignment of object features from same-class samples of different domains while pushing the features from different classes apart. We show that CLIX$^text{3D}$ yields state-of-the-art domain generalization performance under multiple dataset shifts.
4/19/2024
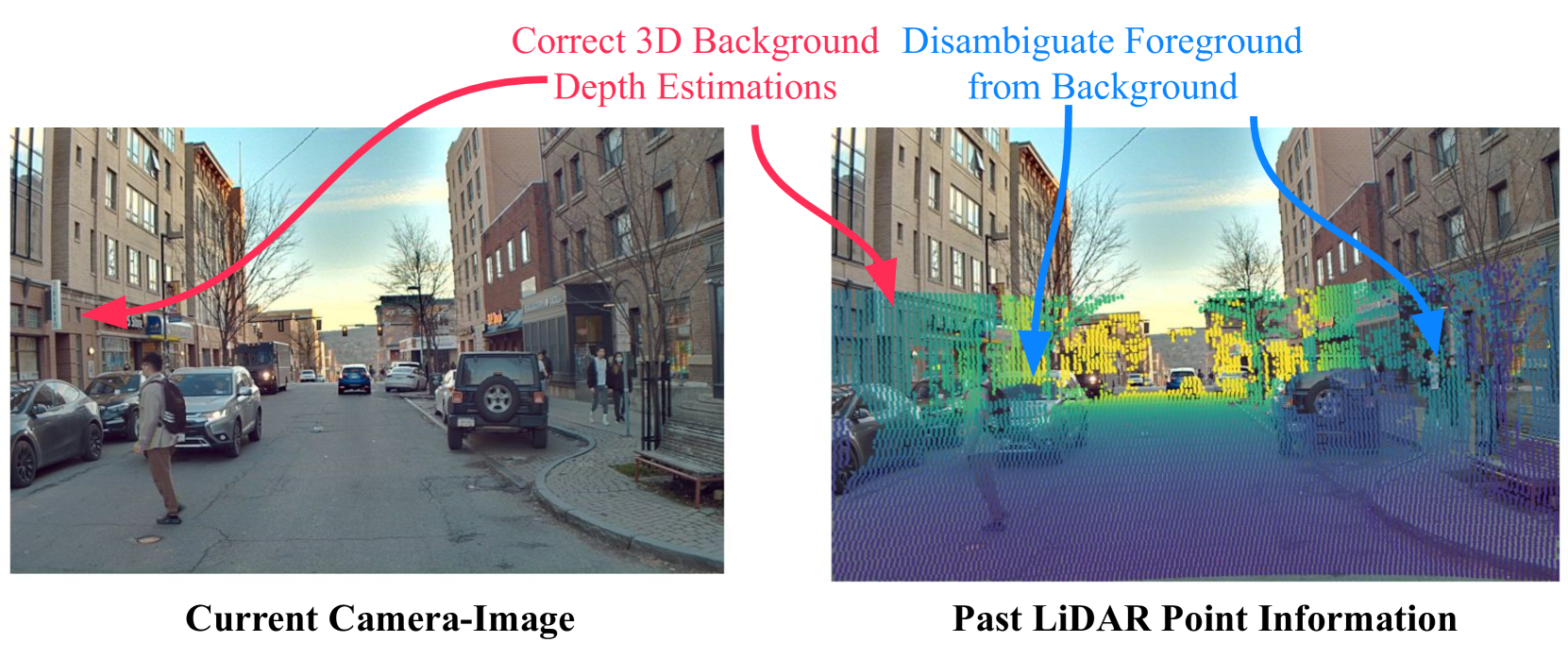
Better Monocular 3D Detectors with LiDAR from the Past
Yurong You, Cheng Perng Phoo, Carlos Andres Diaz-Ruiz, Katie Z Luo, Wei-Lun Chao, Mark Campbell, Bharath Hariharan, Kilian Q Weinberger
0
0
Accurate 3D object detection is crucial to autonomous driving. Though LiDAR-based detectors have achieved impressive performance, the high cost of LiDAR sensors precludes their widespread adoption in affordable vehicles. Camera-based detectors are cheaper alternatives but often suffer inferior performance compared to their LiDAR-based counterparts due to inherent depth ambiguities in images. In this work, we seek to improve monocular 3D detectors by leveraging unlabeled historical LiDAR data. Specifically, at inference time, we assume that the camera-based detectors have access to multiple unlabeled LiDAR scans from past traversals at locations of interest (potentially from other high-end vehicles equipped with LiDAR sensors). Under this setup, we proposed a novel, simple, and end-to-end trainable framework, termed AsyncDepth, to effectively extract relevant features from asynchronous LiDAR traversals of the same location for monocular 3D detectors. We show consistent and significant performance gain (up to 9 AP) across multiple state-of-the-art models and datasets with a negligible additional latency of 9.66 ms and a small storage cost.
4/11/2024