Sparse Points to Dense Clouds: Enhancing 3D Detection with Limited LiDAR Data
2404.06715
0
0

Abstract
3D detection is a critical task that enables machines to identify and locate objects in three-dimensional space. It has a broad range of applications in several fields, including autonomous driving, robotics and augmented reality. Monocular 3D detection is attractive as it requires only a single camera, however, it lacks the accuracy and robustness required for real world applications. High resolution LiDAR on the other hand, can be expensive and lead to interference problems in heavy traffic given their active transmissions. We propose a balanced approach that combines the advantages of monocular and point cloud-based 3D detection. Our method requires only a small number of 3D points, that can be obtained from a low-cost, low-resolution sensor. Specifically, we use only 512 points, which is just 1% of a full LiDAR frame in the KITTI dataset. Our method reconstructs a complete 3D point cloud from this limited 3D information combined with a single image. The reconstructed 3D point cloud and corresponding image can be used by any multi-modal off-the-shelf detector for 3D object detection. By using the proposed network architecture with an off-the-shelf multi-modal 3D detector, the accuracy of 3D detection improves by 20% compared to the state-of-the-art monocular detection methods and 6% to 9% compare to the baseline multi-modal methods on KITTI and JackRabbot datasets.
Create account to get full access
Overview
- This paper explores a method to enhance 3D object detection using limited LiDAR data, a common challenge in real-world applications.
- The proposed approach aims to generate dense 3D point clouds from sparse LiDAR inputs, improving the performance of 3D object detectors.
- The method leverages a learned upsampling module to densify the LiDAR point clouds, and integrates this with a 3D object detection network.
Plain English Explanation
3D object detection is an important task in applications like self-driving cars, where accurately identifying objects in 3D space is crucial. However, acquiring high-quality 3D data, such as from LiDAR sensors, can be challenging and expensive.
This paper presents a way to work around this limitation by taking sparse LiDAR data, which has fewer 3D points, and using a machine learning model to "fill in the gaps" and generate a denser 3D point cloud. This denser cloud can then be fed into a 3D object detection network, improving its performance compared to using the original sparse LiDAR data alone.
The key idea is to train a neural network module that can take the sparse LiDAR input and learn how to produce a more detailed 3D representation. This learned upsampling process allows the system to overcome the limitations of the original sensor data and achieve better 3D object detection results.
Technical Explanation
The paper proposes a method called "Sparse Points to Dense Clouds: Enhancing 3D Detection with Limited LiDAR Data". It starts by observing that most 3D object detectors perform better when given dense, high-quality 3D point cloud data as input. However, acquiring such data, especially from cost-effective LiDAR sensors, can be challenging.
To address this, the authors introduce a learned upsampling module that takes the sparse LiDAR input and generates a denser 3D point cloud. This module is trained end-to-end alongside a 3D object detection network, allowing the two components to work together effectively.
The paper also explores ways to further improve performance, such as incorporating multi-sweep information (Detection is Tracking) and leveraging monocular camera data (Roadside Monocular 3D Detection, Monocular 3D Lane Detection).
Critical Analysis
The paper presents a promising approach to enhance 3D object detection with limited LiDAR data. The learned upsampling module is a clever way to overcome the sparsity of the input point clouds, and integrating it with the 3D detection network allows the two components to work together effectively.
However, the paper does not address the potential limitations of the upsampling module, such as its ability to accurately reconstruct occluded or distant objects, or its performance in challenging environments like dense urban areas. Additionally, the reliance on monocular camera data may introduce new challenges, such as sensitivity to lighting conditions and occlusions.
Further research could explore ways to make the system more robust and generalize better to diverse real-world scenarios. Evaluating the method's performance on larger and more diverse datasets would also help assess its practical applicability.
Conclusion
This paper presents a novel approach to enhance 3D object detection by combining a learned upsampling module with a 3D detection network. The key insight is that generating denser point clouds from sparse LiDAR inputs can improve the performance of 3D object detectors, overcoming the limitations of cost-effective sensor hardware.
The proposed method shows promising results and could have significant implications for applications like autonomous driving, where accurate 3D perception is crucial. By bridging the gap between sparse sensor data and the requirements of 3D detection models, this work represents an important step towards more robust and practical 3D object detection systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
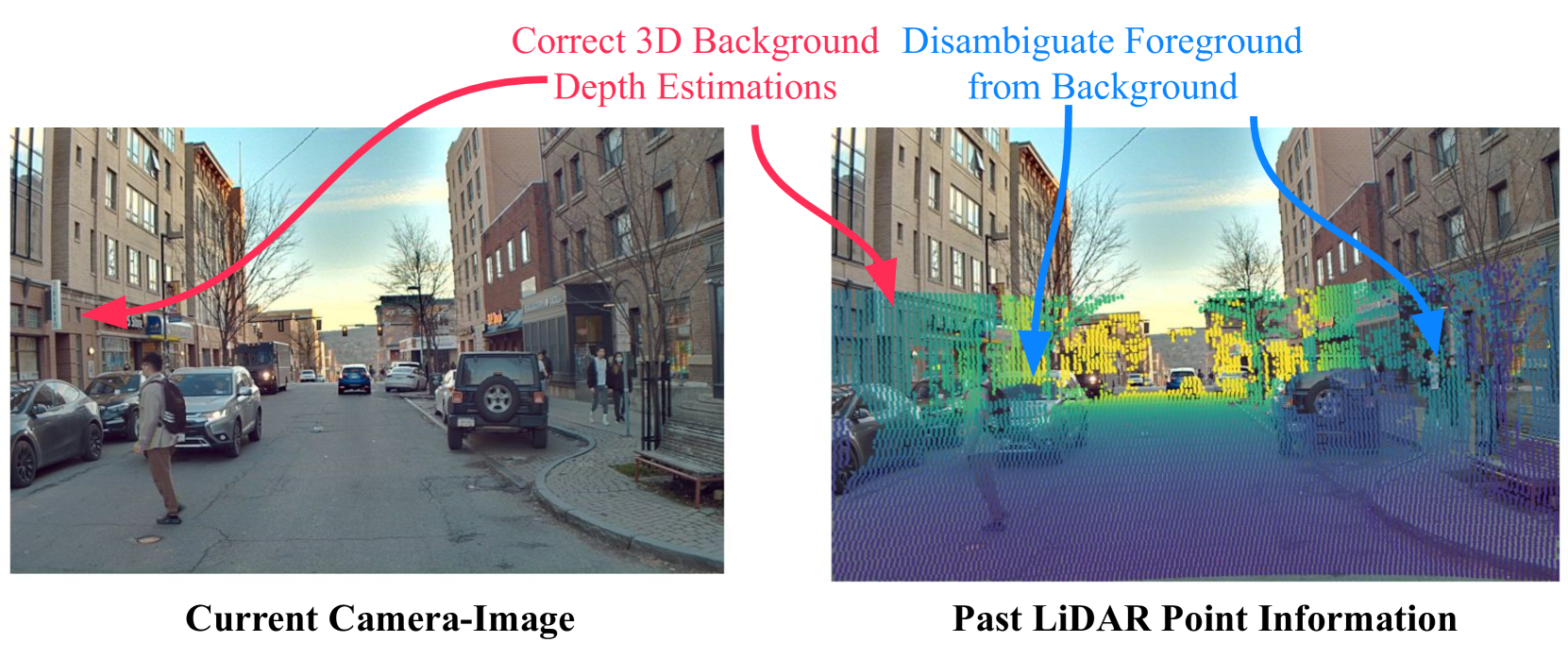
Better Monocular 3D Detectors with LiDAR from the Past
Yurong You, Cheng Perng Phoo, Carlos Andres Diaz-Ruiz, Katie Z Luo, Wei-Lun Chao, Mark Campbell, Bharath Hariharan, Kilian Q Weinberger
0
0
Accurate 3D object detection is crucial to autonomous driving. Though LiDAR-based detectors have achieved impressive performance, the high cost of LiDAR sensors precludes their widespread adoption in affordable vehicles. Camera-based detectors are cheaper alternatives but often suffer inferior performance compared to their LiDAR-based counterparts due to inherent depth ambiguities in images. In this work, we seek to improve monocular 3D detectors by leveraging unlabeled historical LiDAR data. Specifically, at inference time, we assume that the camera-based detectors have access to multiple unlabeled LiDAR scans from past traversals at locations of interest (potentially from other high-end vehicles equipped with LiDAR sensors). Under this setup, we proposed a novel, simple, and end-to-end trainable framework, termed AsyncDepth, to effectively extract relevant features from asynchronous LiDAR traversals of the same location for monocular 3D detectors. We show consistent and significant performance gain (up to 9 AP) across multiple state-of-the-art models and datasets with a negligible additional latency of 9.66 ms and a small storage cost.
4/11/2024
📊
Empowering Urban Traffic Management: Elevated 3D LiDAR for Data Collection and Advanced Object Detection Analysis
Nawfal Guefrachi, Hakim Ghazzai, Ahmad Alsharoa
0
0
The 3D object detection capabilities in urban environments have been enormously improved by recent developments in Light Detection and Range (LiDAR) technology. This paper presents a novel framework that transforms the detection and analysis of 3D objects in traffic scenarios by utilizing the power of elevated LiDAR sensors. We are presenting our methodology's remarkable capacity to collect complex 3D point cloud data, which allows us to accurately and in detail capture the dynamics of urban traffic. Due to the limitation in obtaining real-world traffic datasets, we utilize the simulator to generate 3D point cloud for specific scenarios. To support our experimental analysis, we firstly simulate various 3D point cloud traffic-related objects. Then, we use this dataset as a basis for training and evaluating our 3D object detection models, in identifying and monitoring both vehicles and pedestrians in simulated urban traffic environments. Next, we fine tune the Point Voxel-Region-based Convolutional Neural Network (PV-RCNN) architecture, making it more suited to handle and understand the massive volumes of point cloud data generated by our urban traffic simulations. Our results show the effectiveness of the proposed solution in accurately detecting objects in traffic scenes and highlight the role of LiDAR in improving urban safety and advancing intelligent transportation systems.
5/24/2024

Multimodal 3D Object Detection on Unseen Domains
Deepti Hegde, Suhas Lohit, Kuan-Chuan Peng, Michael J. Jones, Vishal M. Patel
0
0
LiDAR datasets for autonomous driving exhibit biases in properties such as point cloud density, range, and object dimensions. As a result, object detection networks trained and evaluated in different environments often experience performance degradation. Domain adaptation approaches assume access to unannotated samples from the test distribution to address this problem. However, in the real world, the exact conditions of deployment and access to samples representative of the test dataset may be unavailable while training. We argue that the more realistic and challenging formulation is to require robustness in performance to unseen target domains. We propose to address this problem in a two-pronged manner. First, we leverage paired LiDAR-image data present in most autonomous driving datasets to perform multimodal object detection. We suggest that working with multimodal features by leveraging both images and LiDAR point clouds for scene understanding tasks results in object detectors more robust to unseen domain shifts. Second, we train a 3D object detector to learn multimodal object features across different distributions and promote feature invariance across these source domains to improve generalizability to unseen target domains. To this end, we propose CLIX$^text{3D}$, a multimodal fusion and supervised contrastive learning framework for 3D object detection that performs alignment of object features from same-class samples of different domains while pushing the features from different classes apart. We show that CLIX$^text{3D}$ yields state-of-the-art domain generalization performance under multiple dataset shifts.
4/19/2024

Shelf-Supervised Multi-Modal Pre-Training for 3D Object Detection
Mehar Khurana, Neehar Peri, Deva Ramanan, James Hays
0
0
State-of-the-art 3D object detectors are often trained on massive labeled datasets. However, annotating 3D bounding boxes remains prohibitively expensive and time-consuming, particularly for LiDAR. Instead, recent works demonstrate that self-supervised pre-training with unlabeled data can improve detection accuracy with limited labels. Contemporary methods adapt best-practices for self-supervised learning from the image domain to point clouds (such as contrastive learning). However, publicly available 3D datasets are considerably smaller and less diverse than those used for image-based self-supervised learning, limiting their effectiveness. We do note, however, that such data is naturally collected in a multimodal fashion, often paired with images. Rather than pre-training with only self-supervised objectives, we argue that it is better to bootstrap point cloud representations using image-based foundation models trained on internet-scale image data. Specifically, we propose a shelf-supervised approach (e.g. supervised with off-the-shelf image foundation models) for generating zero-shot 3D bounding boxes from paired RGB and LiDAR data. Pre-training 3D detectors with such pseudo-labels yields significantly better semi-supervised detection accuracy than prior self-supervised pretext tasks. Importantly, we show that image-based shelf-supervision is helpful for training LiDAR-only and multi-modal (RGB + LiDAR) detectors. We demonstrate the effectiveness of our approach on nuScenes and WOD, significantly improving over prior work in limited data settings.
6/17/2024